
一种垂直循环停车控制系统及其工作方法.pdf

Wi****m7


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种垂直循环停车控制系统及其工作方法.pdf
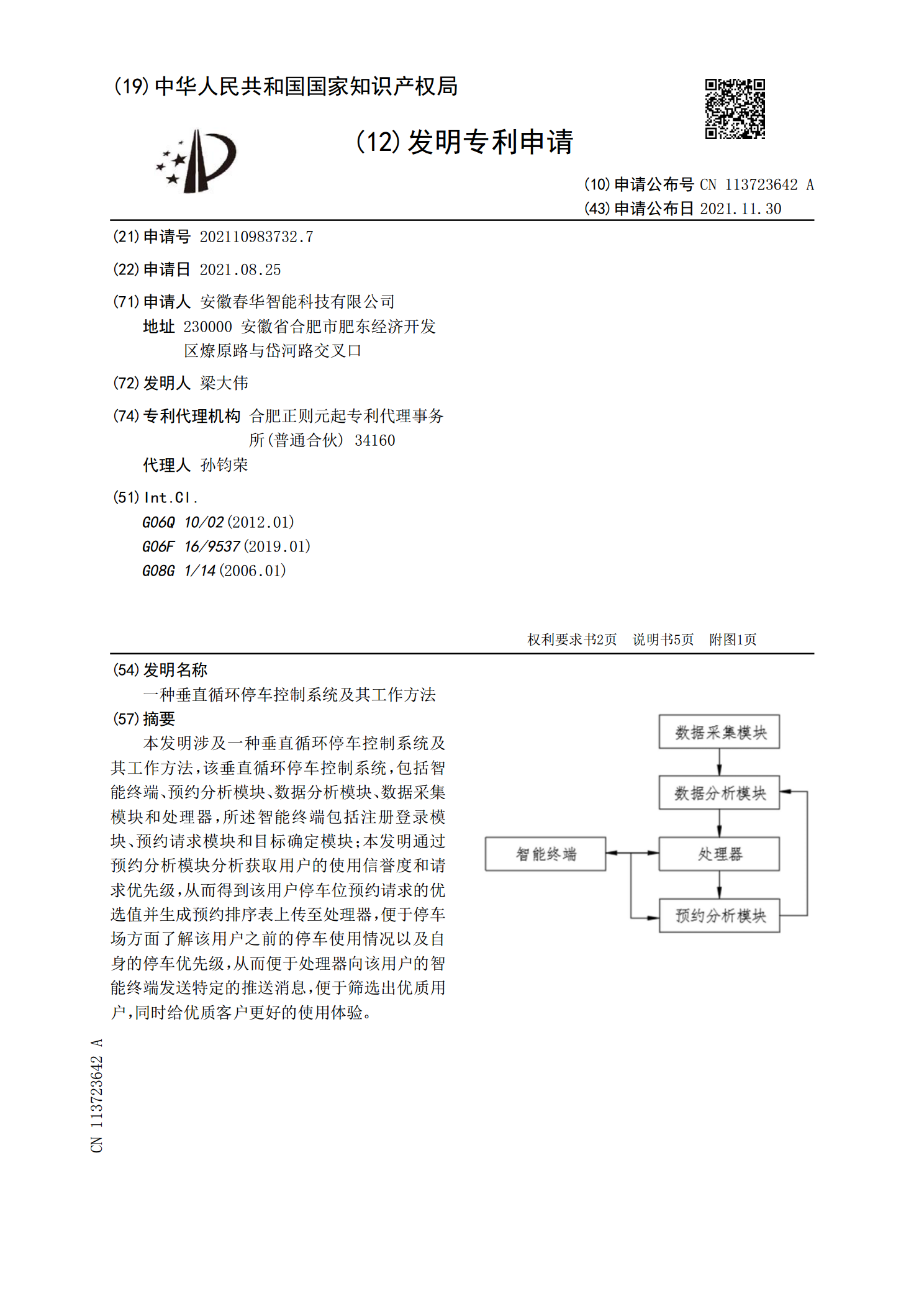
本发明涉及一种垂直循环停车控制系统及其工作方法,该垂直循环停车控制系统,包括智能终端、预约分析模块、数据分析模块、数据采集模块和处理器,所述智能终端包括注册登录模块、预约请求模块和目标确定模块;本发明通过预约分析模块分析获取用户的使用信誉度和请求优先级,从而得到该用户停车位预约请求的优选值并生成预约排序表上传至处理器,便于停车场方面了解该用户之前的停车使用情况以及自身的停车优先级,从而便于处理器向该用户的智能终端发送特定的推送消息,便于筛选出优质用户,同时给优质客户更好的使用体验。

一种用于垂直循环智能停车设备的位移机构及其工作方法.pdf
本发明公开了一种用于垂直循环智能停车设备的位移机构及其工作方法,该位移机构包括支撑架和设置在支撑架一侧的垂直循环智能停车设备,支撑架的一侧表面滑动安装有升降架,支撑架的另一侧表面滑动安装有配重架,配重架上固定安装有配重钢板,两个托杆与升降顶架固定连接,升降顶架上活动安装有活动挂车,活动挂车的底部固定安装有升降安装架,升降安装架上活动安装有托车板;本发明可以满足不同位置高度的汽车的取车需求,无需等待载车板循环下降到最低处,不需要排队取车,该位移机构加快了取车速度,节约了时间,保证了汽车在移动过程中的安全和稳

一种用于垂直循环智能停车设备的固定机构及其工作方法.pdf
本发明公开一种用于垂直循环智能停车设备的固定机构,包括载车架,所述载车架上两侧对称设置有载车板,所述载车板一侧设置有导向组件,所述导向组件包括U型定位架、支撑杆,所述U型定位架底部一端固定安装于载车板顶部,所述U型定位架另一端向上弯折,并固定安装于支撑杆上,所述支撑杆固定安装于载车板顶部,所述载车板上靠近导向组件一侧设置有移动槽。本发明通过调节两个载车板之间的距离,使得载车架可以适应不同车型的轮距,同时相对移动的载车板将汽车中心保持在载车架中部,避免因停车过于偏斜导致载车架以及机架整体中心移位,最终导致汽
一种垂直循环立体停车设备的控制系统.pdf
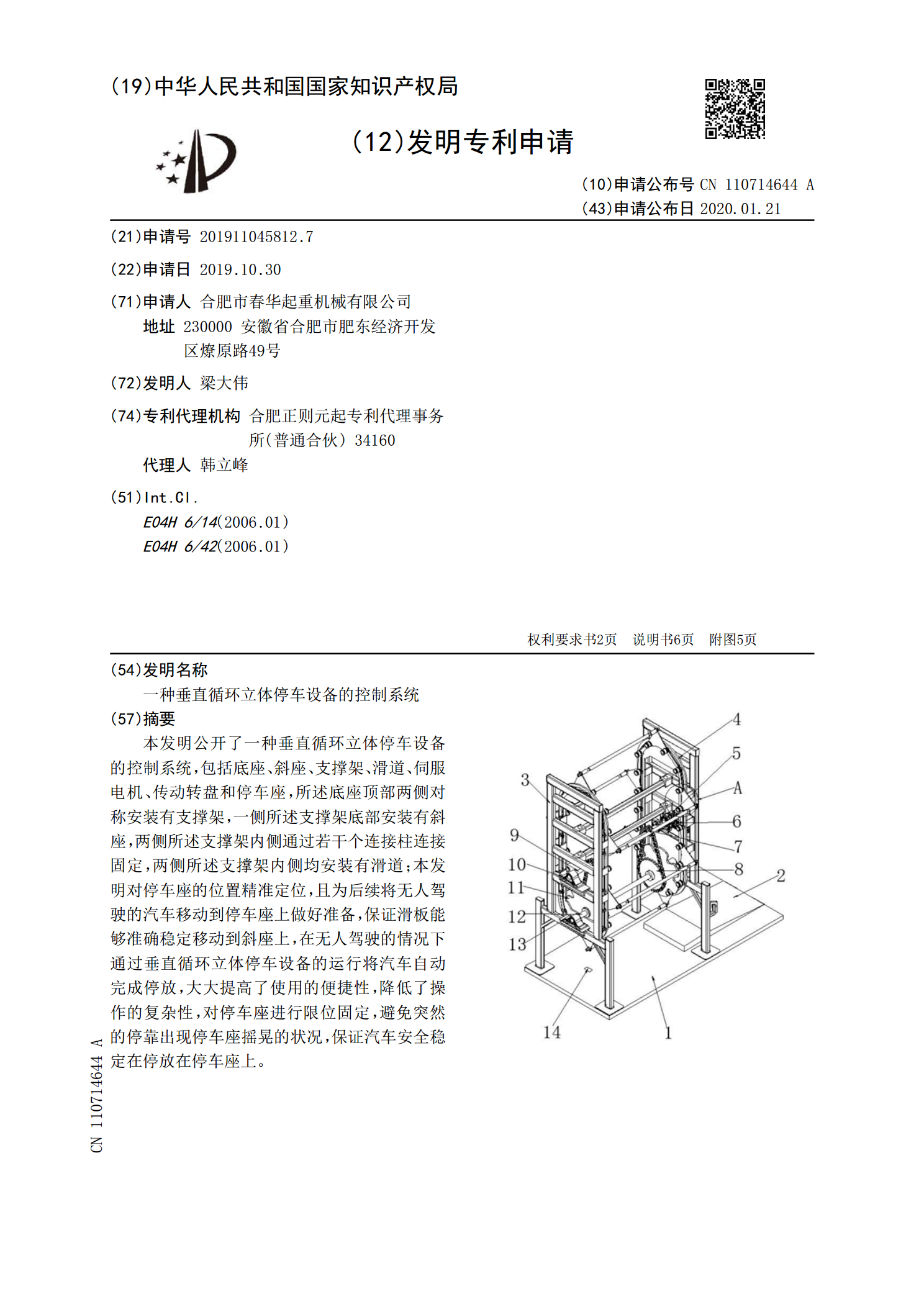
本发明公开了一种垂直循环立体停车设备的控制系统,包括底座、斜座、支撑架、滑道、伺服电机、传动转盘和停车座,所述底座顶部两侧对称安装有支撑架,一侧所述支撑架底部安装有斜座,两侧所述支撑架内侧通过若干个连接柱连接固定,两侧所述支撑架内侧均安装有滑道;本发明对停车座的位置精准定位,且为后续将无人驾驶的汽车移动到停车座上做好准备,保证滑板能够准确稳定移动到斜座上,在无人驾驶的情况下通过垂直循环立体停车设备的运行将汽车自动完成停放,大大提高了使用的便捷性,降低了操作的复杂性,对停车座进行限位固定,避免突然的停靠出现
一种垂直循环立体停车设备.pdf
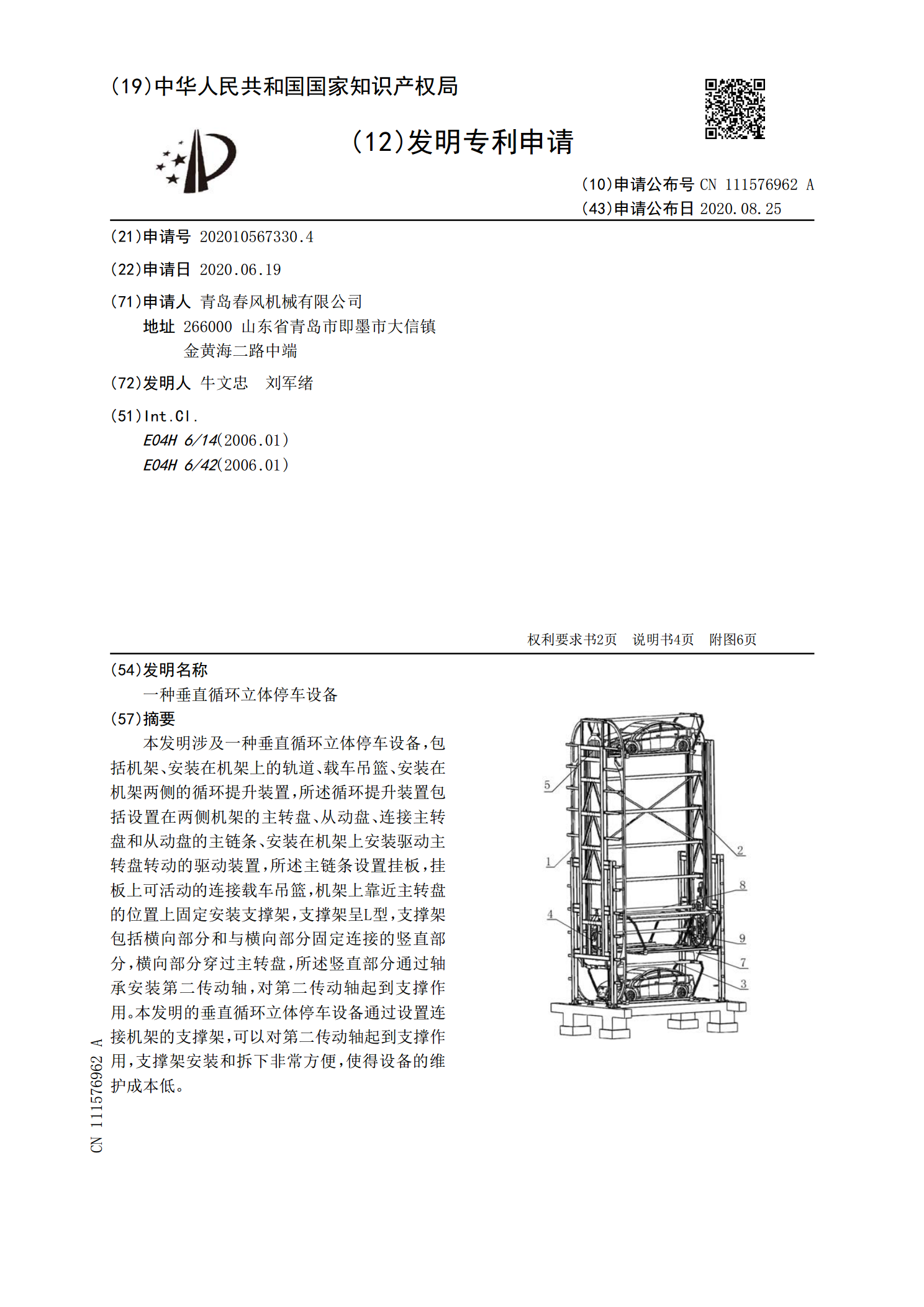
本发明涉及一种垂直循环立体停车设备,包括机架、安装在机架上的轨道、载车吊篮、安装在机架两侧的循环提升装置,所述循环提升装置包括设置在两侧机架的主转盘、从动盘、连接主转盘和从动盘的主链条、安装在机架上安装驱动主转盘转动的驱动装置,所述主链条设置挂板,挂板上可活动的连接载车吊篮,机架上靠近主转盘的位置上固定安装支撑架,支撑架呈L型,支撑架包括横向部分和与横向部分固定连接的竖直部分,横向部分穿过主转盘,所述竖直部分通过轴承安装第二传动轴,对第二传动轴起到支撑作用。本发明的垂直循环立体停车设备通过设置连接机架的支