
一种基于多源异构传感器的融合定位方法及系统.pdf

玉怡****文档

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于多源异构传感器的融合定位方法及系统.pdf
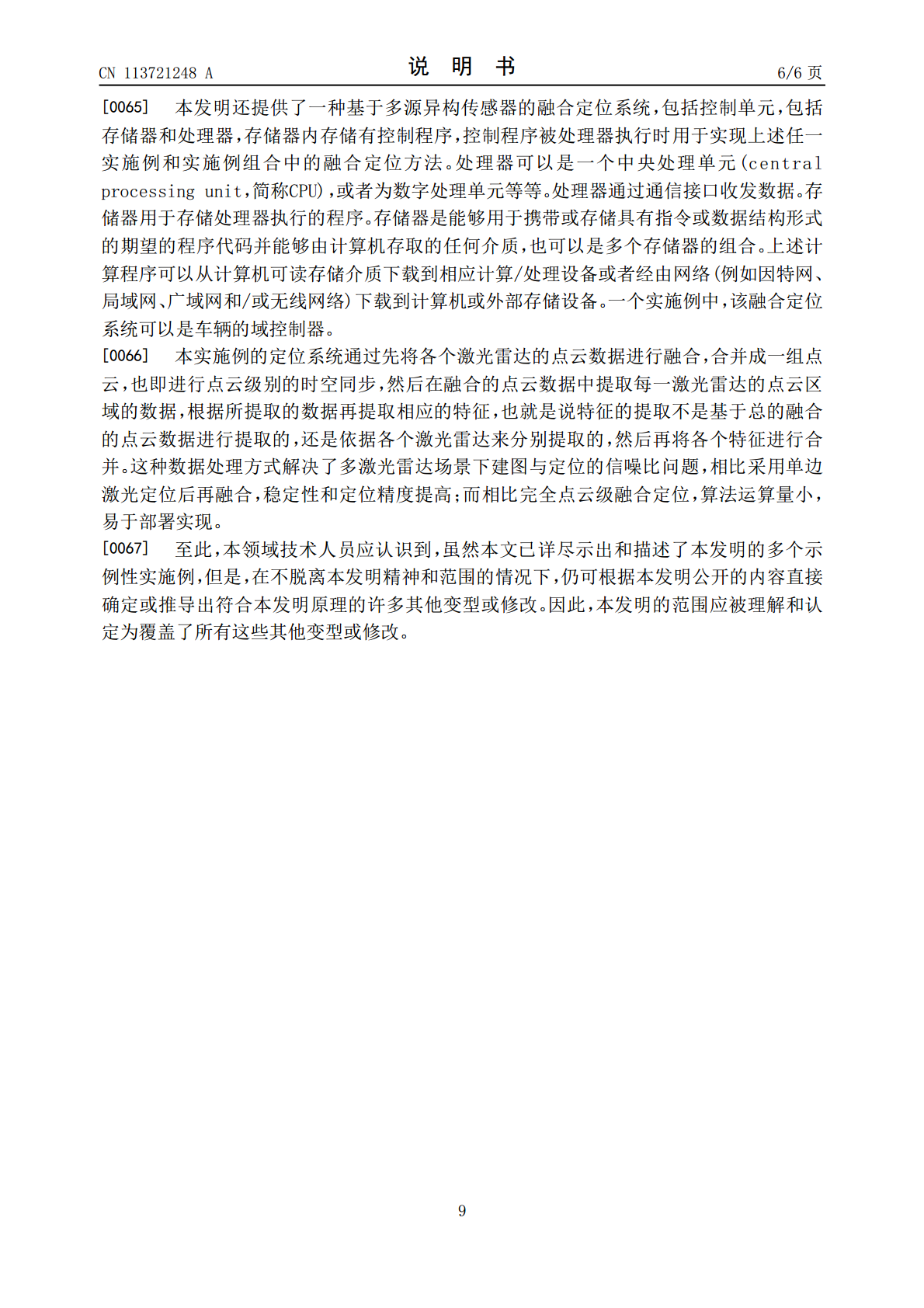
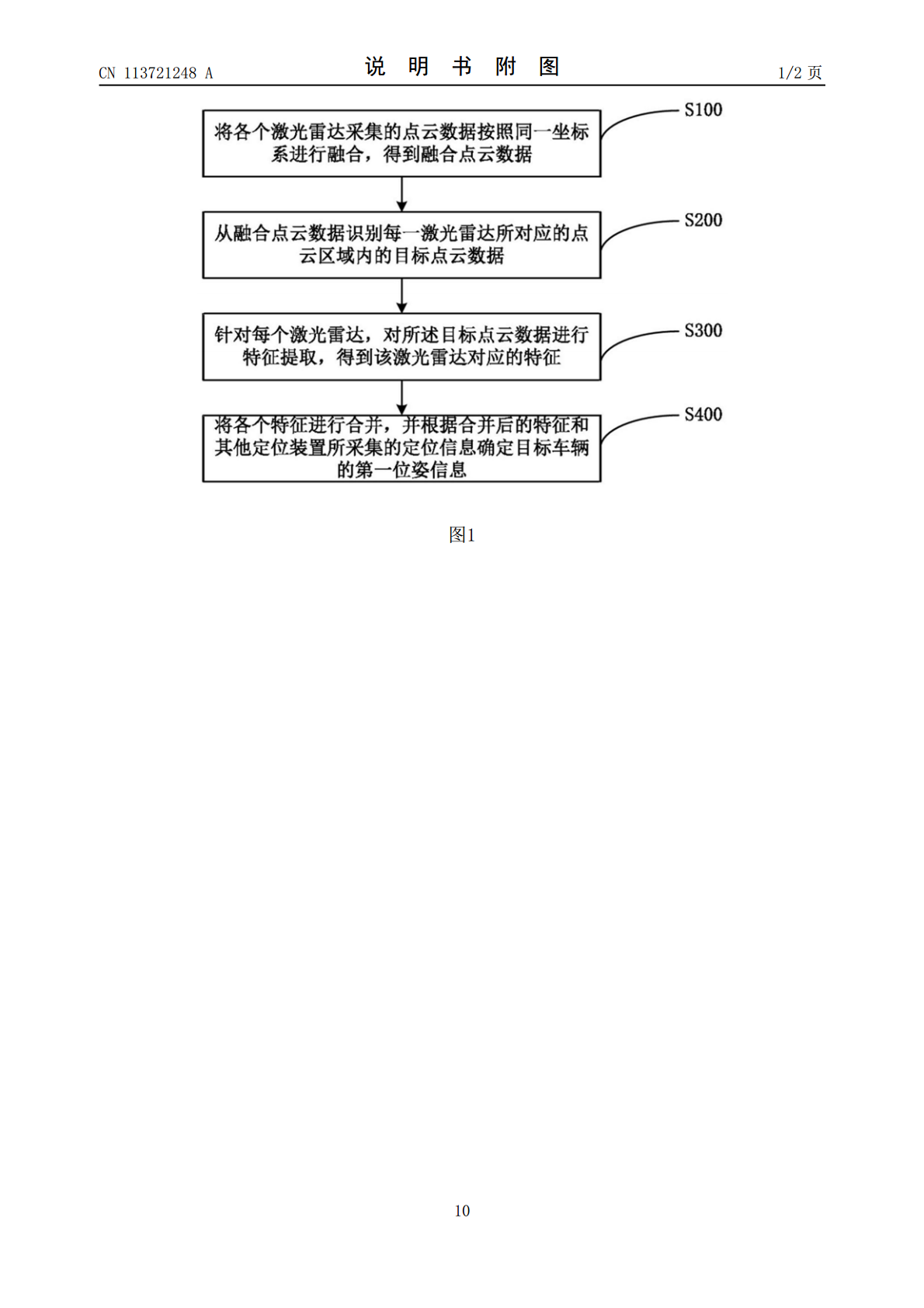
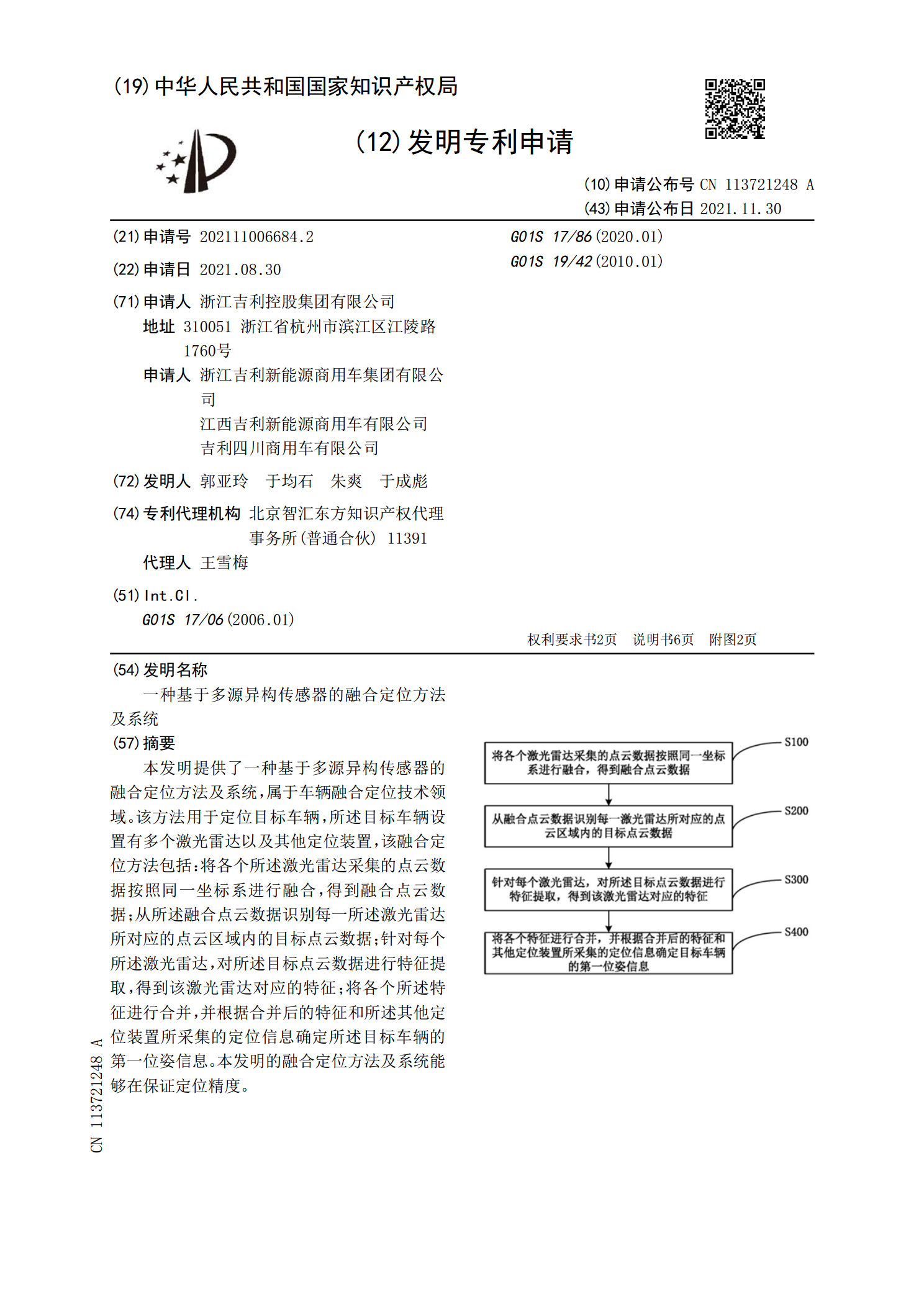
本发明提供了一种基于多源异构传感器的融合定位方法及系统,属于车辆融合定位技术领域。该方法用于定位目标车辆,所述目标车辆设置有多个激光雷达以及其他定位装置,该融合定位方法包括:将各个所述激光雷达采集的点云数据按照同一坐标系进行融合,得到融合点云数据;从所述融合点云数据识别每一所述激光雷达所对应的点云区域内的目标点云数据;针对每个所述激光雷达,对所述目标点云数据进行特征提取,得到该激光雷达对应的特征;将各个所述特征进行合并,并根据合并后的特征和所述其他定位装置所采集的定位信息确定所述目标车辆的第一位姿信息。本

一种基于多传感器数据融合的定位系统及定位方法.pdf
本发明公开了一种基于多传感器数据融合的定位系统及定位方法,通过在码盘架上固定编码器和全向轮,全向轮的主转动轴与编码器转轴连接,固定支架上固定有三个码盘架,三个码盘架上的三个编码器转轴轴线所在竖直平面之间的夹角均为120°,三个全向轮同时接触运动地面;采用三码盘全场定位系统,当移动机器人运动时,三个全向轮被动旋转,能够准确获取机器人运动全方位移动数据,从而减小因陀螺仪的角度漂移而导致定位不准的影响,通过三个码盘坐标的更新公式获取待定位机器人在三个自由度的变化情况,实现相对定位,提高了机器人在高速行驶以及不同
一种多源传感器融合定位的切换方法及系统.pdf
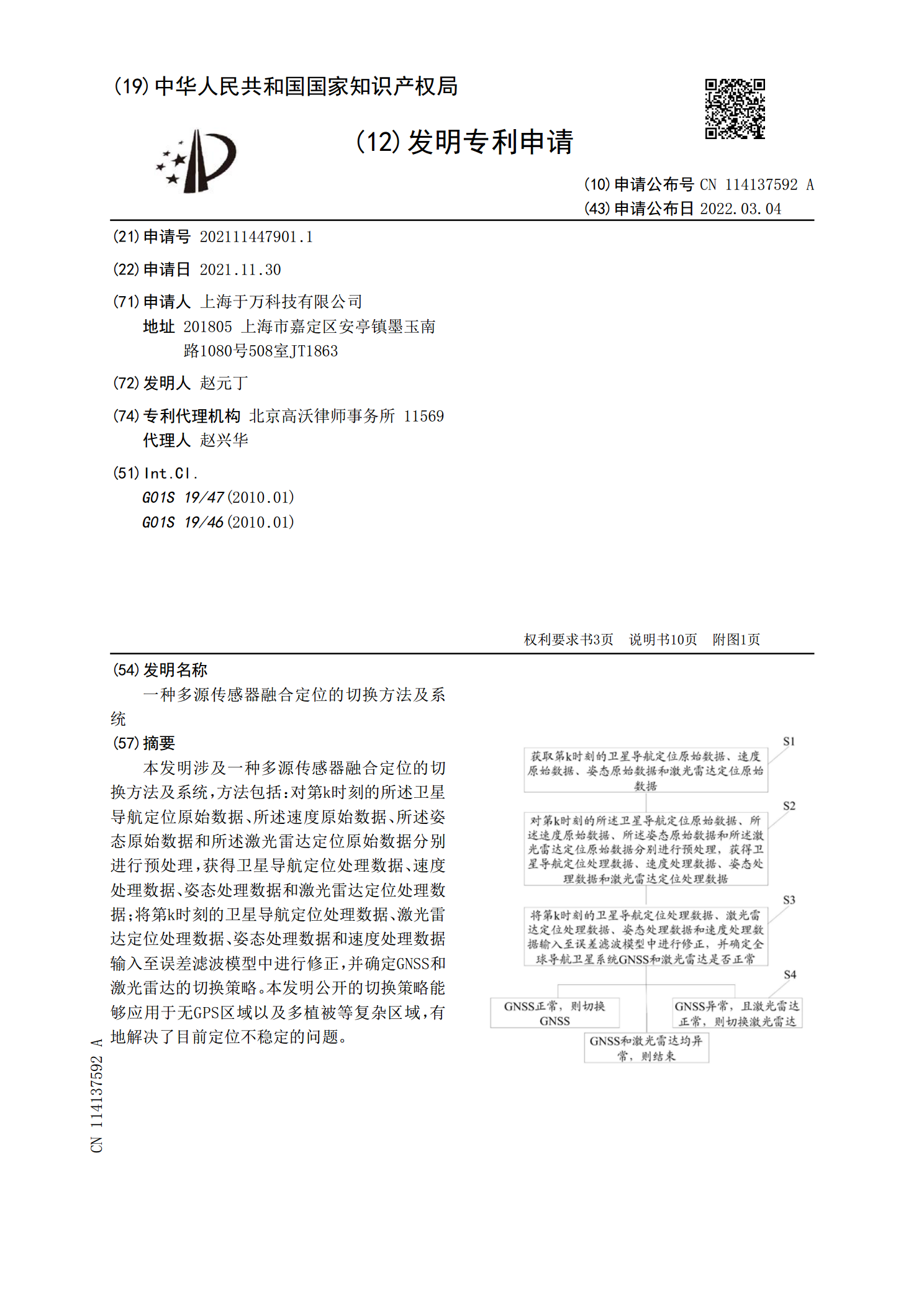
本发明涉及一种多源传感器融合定位的切换方法及系统,方法包括:对第k时刻的所述卫星导航定位原始数据、所述速度原始数据、所述姿态原始数据和所述激光雷达定位原始数据分别进行预处理,获得卫星导航定位处理数据、速度处理数据、姿态处理数据和激光雷达定位处理数据;将第k时刻的卫星导航定位处理数据、激光雷达定位处理数据、姿态处理数据和速度处理数据输入至误差滤波模型中进行修正,并确定GNSS和激光雷达的切换策略。本发明公开的切换策略能够应用于无GPS区域以及多植被等复杂区域,有地解决了目前定位不稳定的问题。
基于物联网的多源异构数据融合方法及系统.pdf
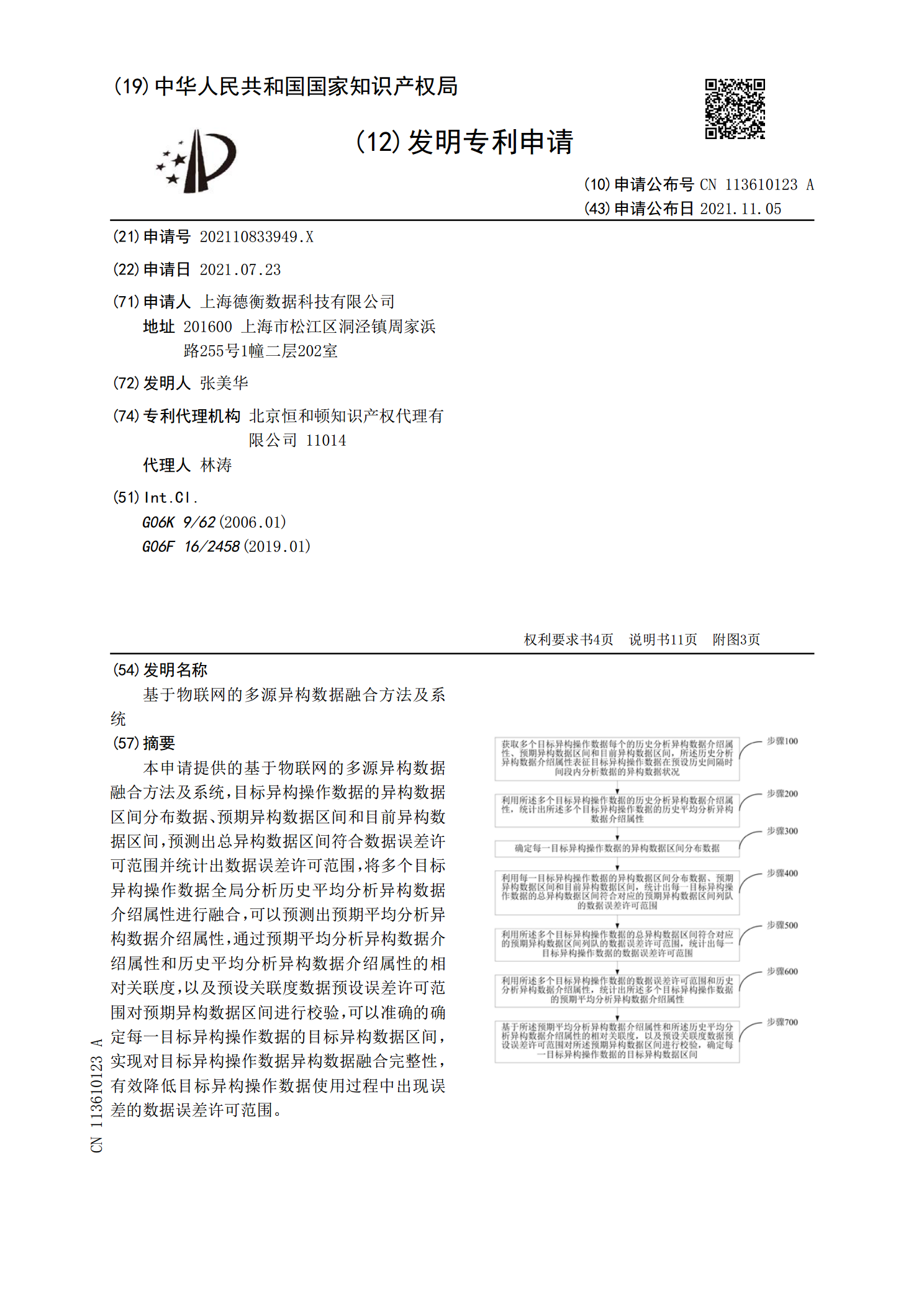
本申请提供的基于物联网的多源异构数据融合方法及系统,目标异构操作数据的异构数据区间分布数据、预期异构数据区间和目前异构数据区间,预测出总异构数据区间符合数据误差许可范围并统计出数据误差许可范围,将多个目标异构操作数据全局分析历史平均分析异构数据介绍属性进行融合,可以预测出预期平均分析异构数据介绍属性,通过预期平均分析异构数据介绍属性和历史平均分析异构数据介绍属性的相对关联度,以及预设关联度数据预设误差许可范围对预期异构数据区间进行校验,可以准确的确定每一目标异构操作数据的目标异构数据区间,实现对目标异构操

一种基于多源融合的井下人员定位系统及方法.pdf
本发明公开了一种基于多源融合的井下人员定位系统及方法,包括地面监控中心、上层终端、通信主干网、网关节点、总线、定位锚节点、位置信标和移动节点,针对煤矿井下人员定位技术精度低、定位盲区多,实现全覆盖成本高等问题,本发明采用电磁波一维粗定位与惯导高精度定位相结合的方法,根据需要,不需要高精度定位的区域使用电磁波粗定位,以节省移动节点的电量消耗,需要高精度定位区域,使用惯性导航高精度定位,上位机软件可以发送定位切换命令给指定的移动节点,需要了解其精确的位置和行走轨迹时,将惯导定位数据传输给定位锚节点,以减小定位