
移动机器人的运动轨迹估计方法、装置和存储介质.pdf

一条****然后

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
移动机器人的运动轨迹估计方法、装置和存储介质.pdf
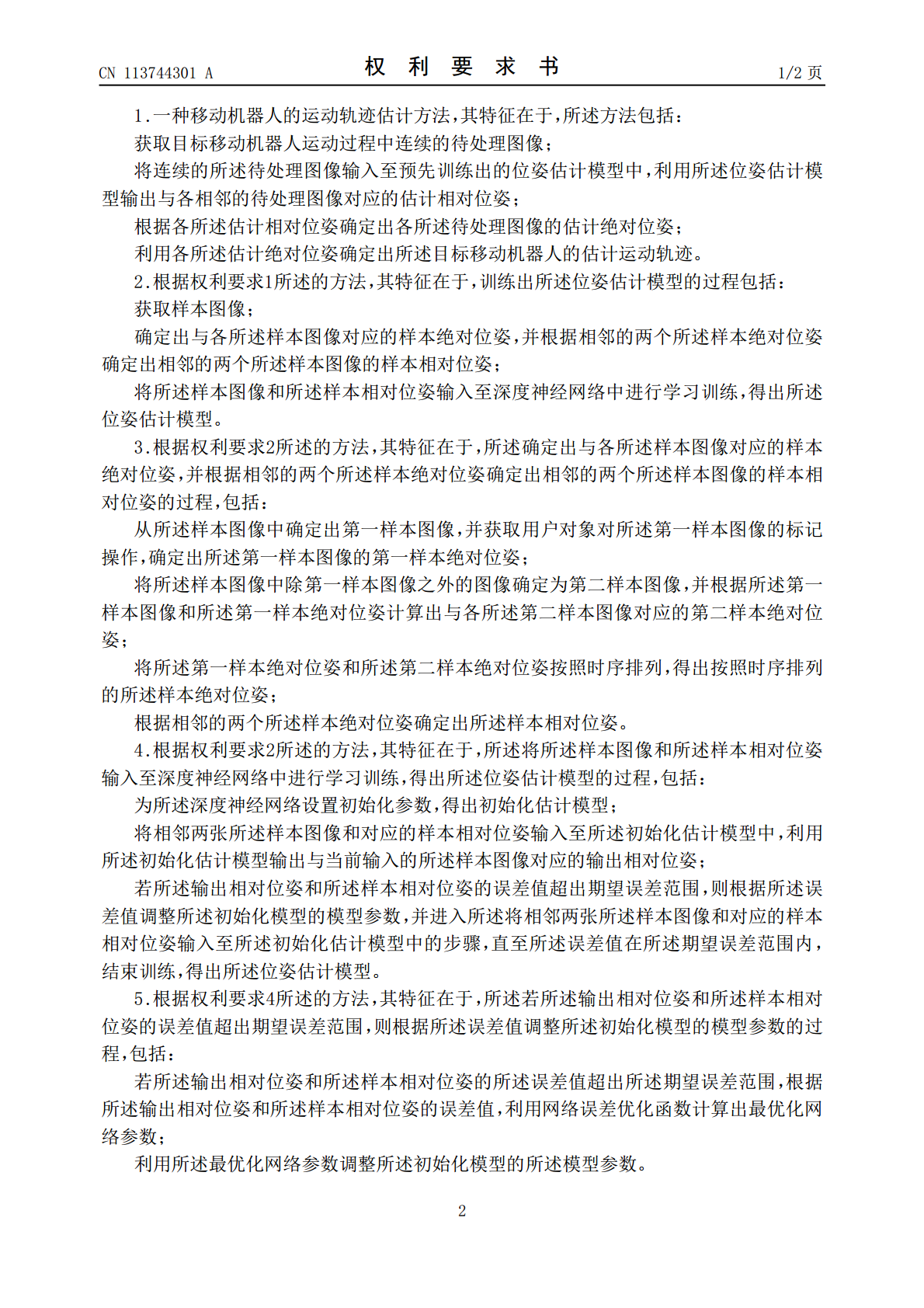
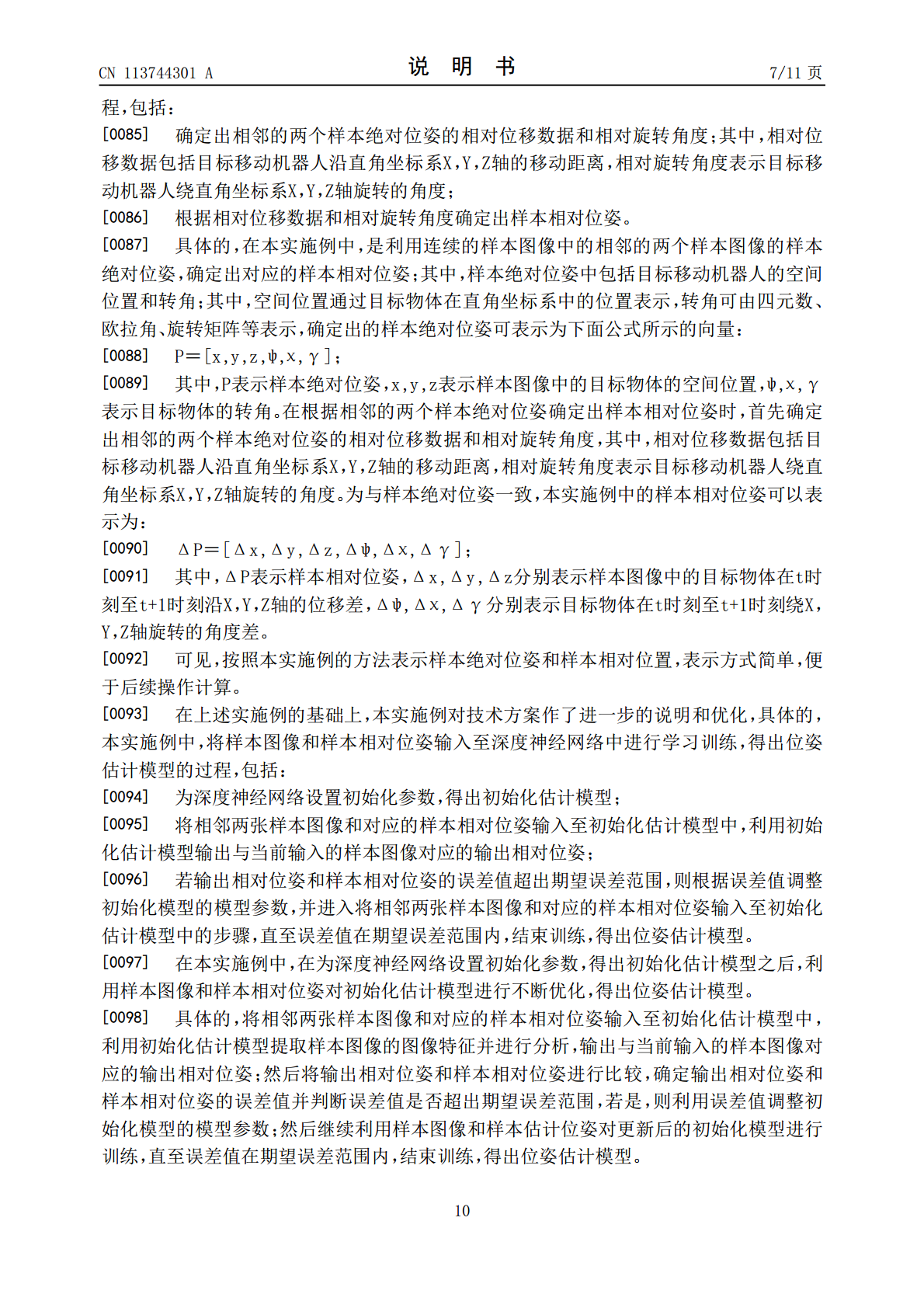
本申请涉及一种移动机器人的运动轨迹估计方法、装置和存储介质。方法包括:获取目标移动机器人运动过程中连续的待处理图像;将连续的待处理图像输入至预先训练出的位姿估计模型中,利用位姿估计模型输出与各相邻的待处理图像对应的估计相对位姿;根据各估计相对位姿确定出各待处理图像的估计绝对位姿;利用各估计绝对位姿确定出目标移动机器人的估计运动轨迹。本方法中位姿估计模型的训练样本为两张相邻的样本图像和与之对应的样本相对位姿,由于估计相对位姿中包括相邻待处理图像的位姿在时间和空间中的变化情况,因此能够利用位姿估计模型输出更加
深度和自运动轨迹的估计方法、装置、设备及存储介质.pdf
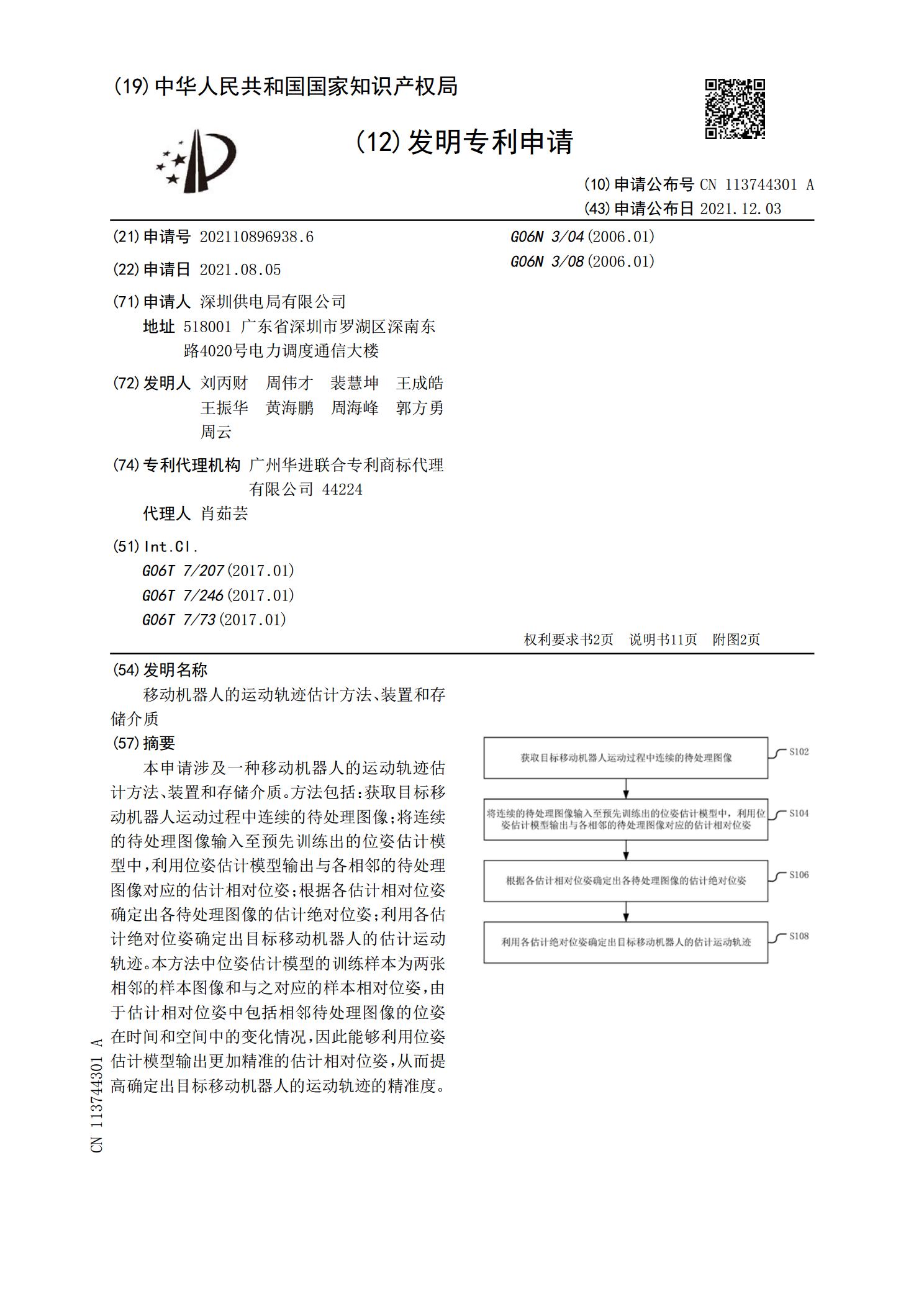
本发明公开了深度和自运动轨迹的估计方法、装置、设备及存储介质。该方法包括:获取预设模型、源视图和目标视图,预设模型包括深度估计网络、运动估计网络和隐式线索网络,隐式线索网络用于从运动估计网络提取源视图与目标视图之间的静态和动态特征并恒等映射至深度估计网络,源视图和目标视图为相邻时刻的两帧彩色图像;将源视图和目标视图输入至预设模型;基于运动估计网络,估计相机的自运动轨迹;以及基于深度估计网络和源视图与目标视图之间的静态和动态特征,估计源视图和/或目标视图的深度。本发明提供的方案能够有效缓解运动物体的伪影问题
运动轨迹规划方法、装置、设备和存储介质.pdf
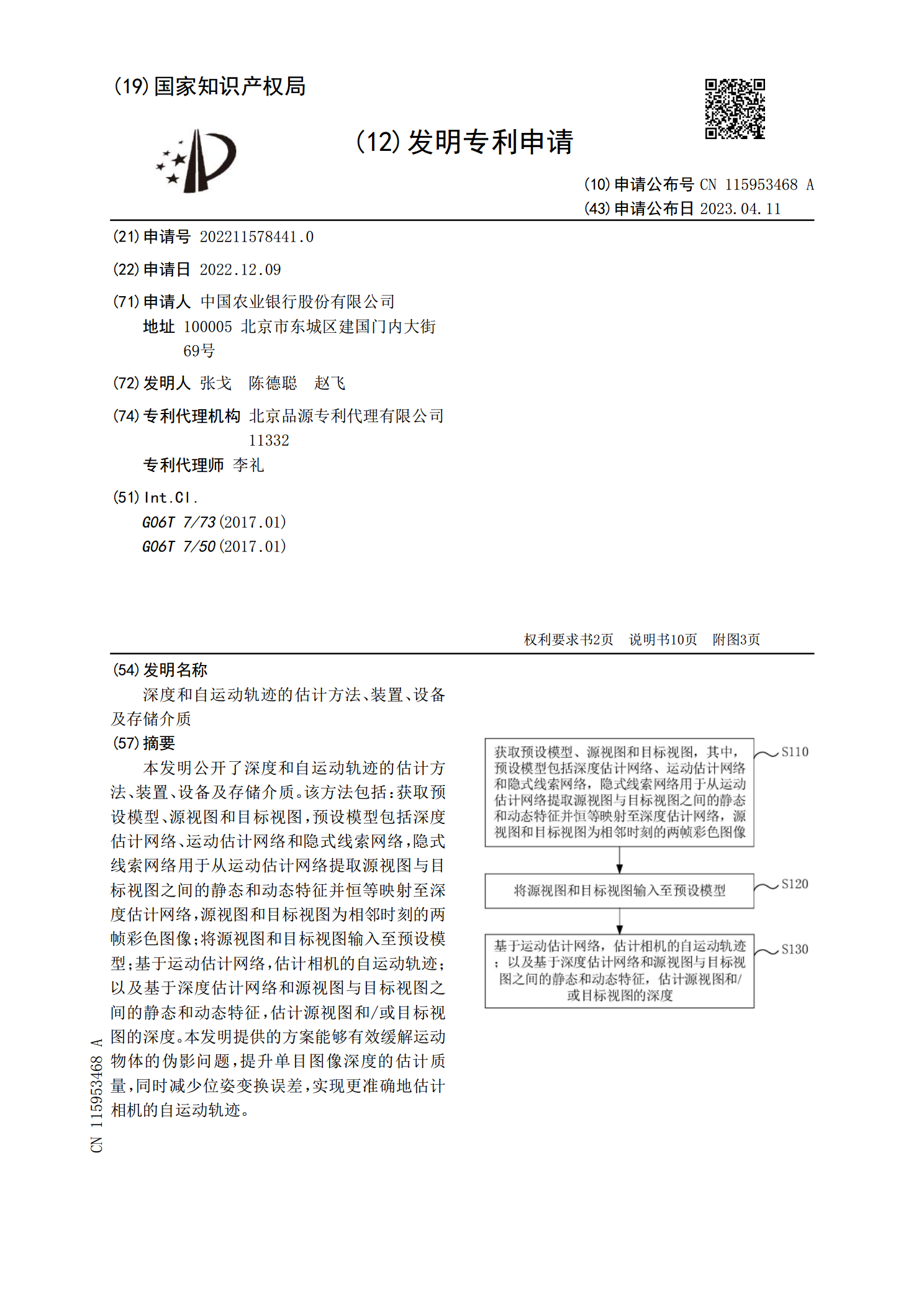
本申请涉及一种运动轨迹规划方法、装置、设备和存储介质。该方法包括:获取待规划对象的运动控制参数;其中,所述运动控制参数包括所述待规划对象的起始状态、目标状态以及从起始状态运动到目标状态所需的约束参数;当所述起始状态中的起始加速度不等于零时,对所述起始加速度进行归零处理,得到归零处理后的起始状态;根据所述归零处理后的起始状态、所述目标状态以及所述约束参数,对所述待规划对象进行S型曲线规划。该方法能够针对初始加速度不等于零的情况进行处理,使得所规划的轨迹曲线更加平滑、速度能够频繁变换且具有一定的平稳性,能够满
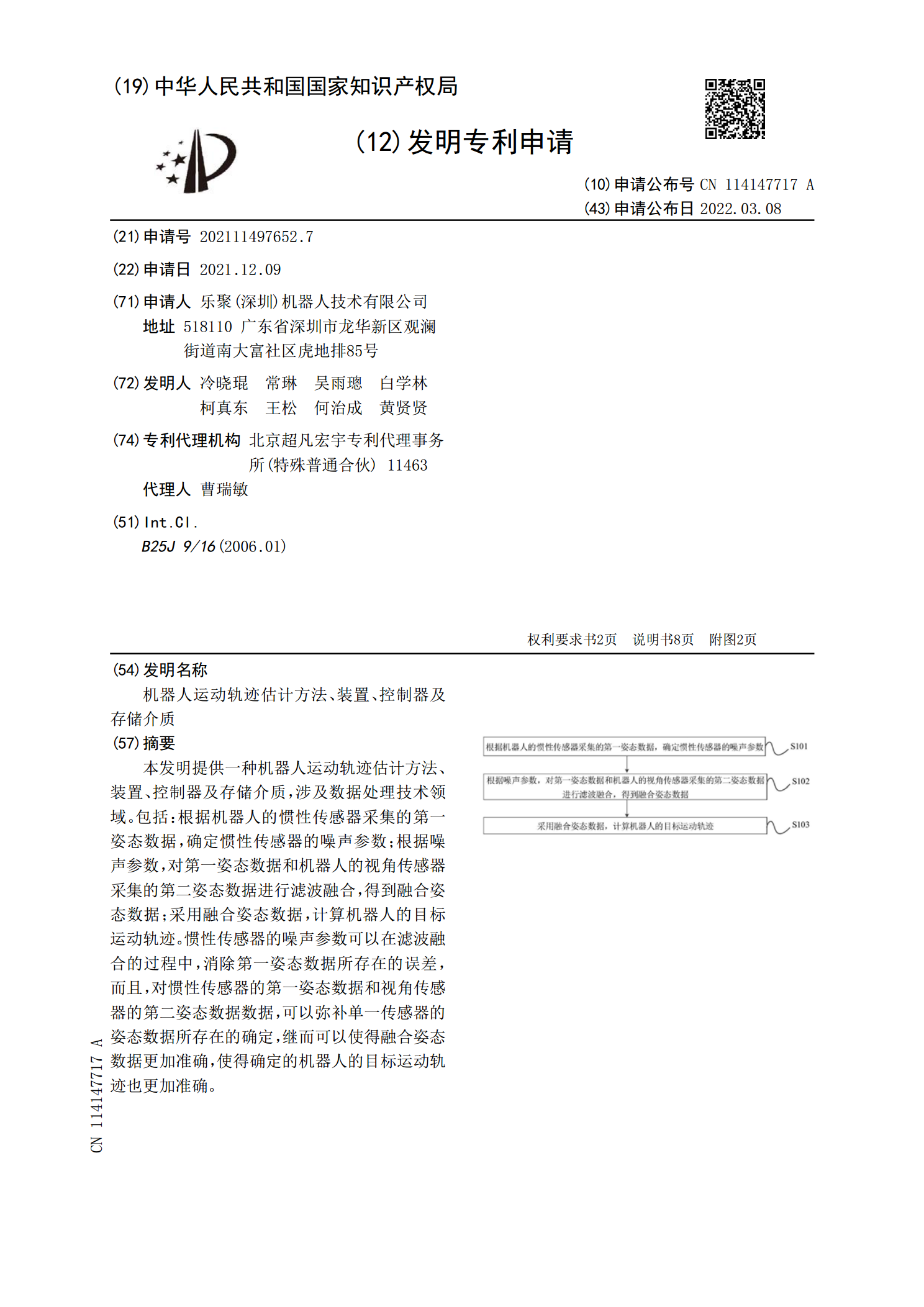
机器人运动轨迹估计方法、装置、控制器及存储介质.pdf
本发明提供一种机器人运动轨迹估计方法、装置、控制器及存储介质,涉及数据处理技术领域。包括:根据机器人的惯性传感器采集的第一姿态数据,确定惯性传感器的噪声参数;根据噪声参数,对第一姿态数据和机器人的视角传感器采集的第二姿态数据进行滤波融合,得到融合姿态数据;采用融合姿态数据,计算机器人的目标运动轨迹。惯性传感器的噪声参数可以在滤波融合的过程中,消除第一姿态数据所存在的误差,而且,对惯性传感器的第一姿态数据和视角传感器的第二姿态数据数据,可以弥补单一传感器的姿态数据所存在的确定,继而可以使得融合姿态数据更加准
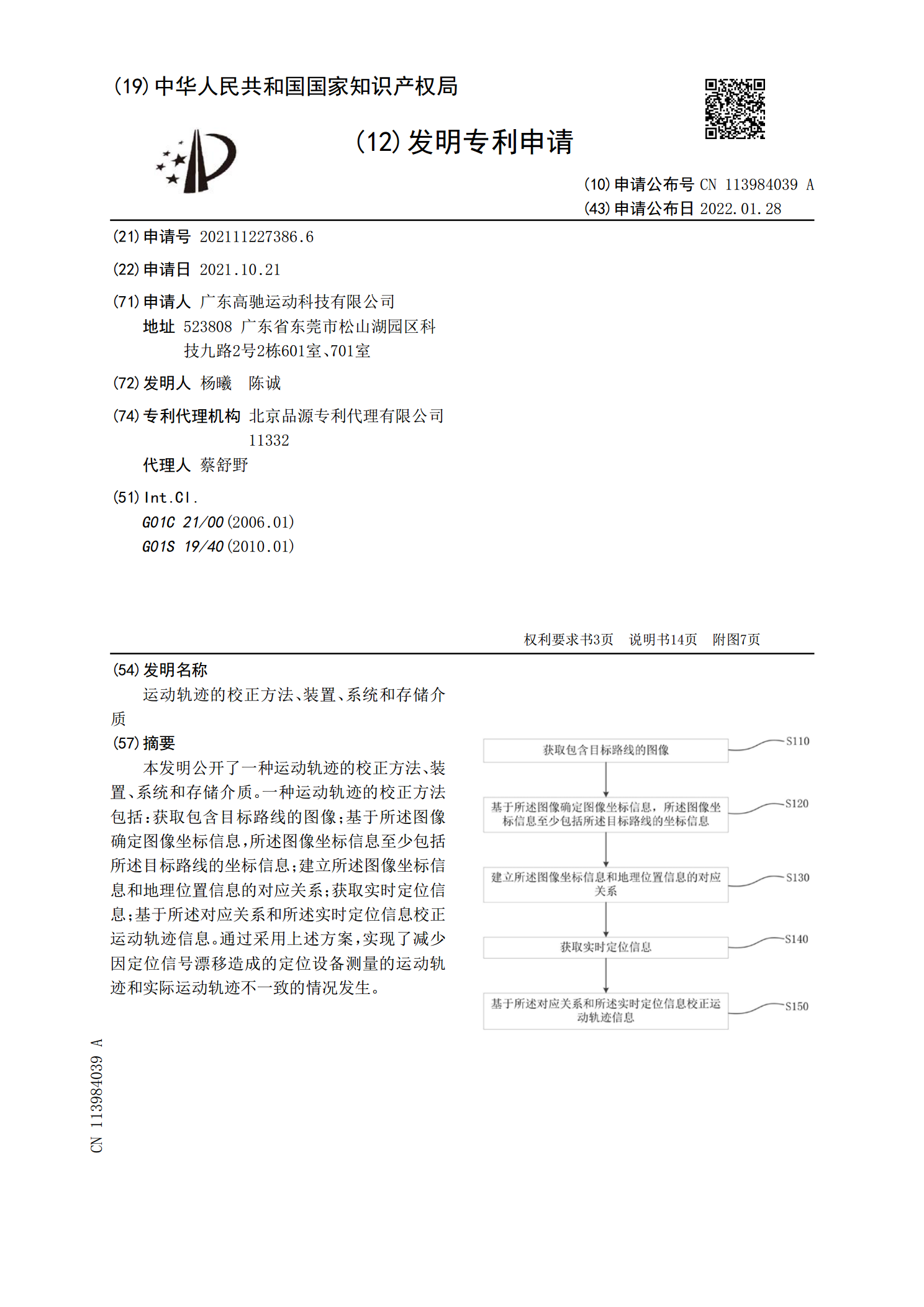
运动轨迹的校正方法、装置、系统和存储介质.pdf
本发明公开了一种运动轨迹的校正方法、装置、系统和存储介质。一种运动轨迹的校正方法包括:获取包含目标路线的图像;基于所述图像确定图像坐标信息,所述图像坐标信息至少包括所述目标路线的坐标信息;建立所述图像坐标信息和地理位置信息的对应关系;获取实时定位信息;基于所述对应关系和所述实时定位信息校正运动轨迹信息。通过采用上述方案,实现了减少因定位信号漂移造成的定位设备测量的运动轨迹和实际运动轨迹不一致的情况发生。