
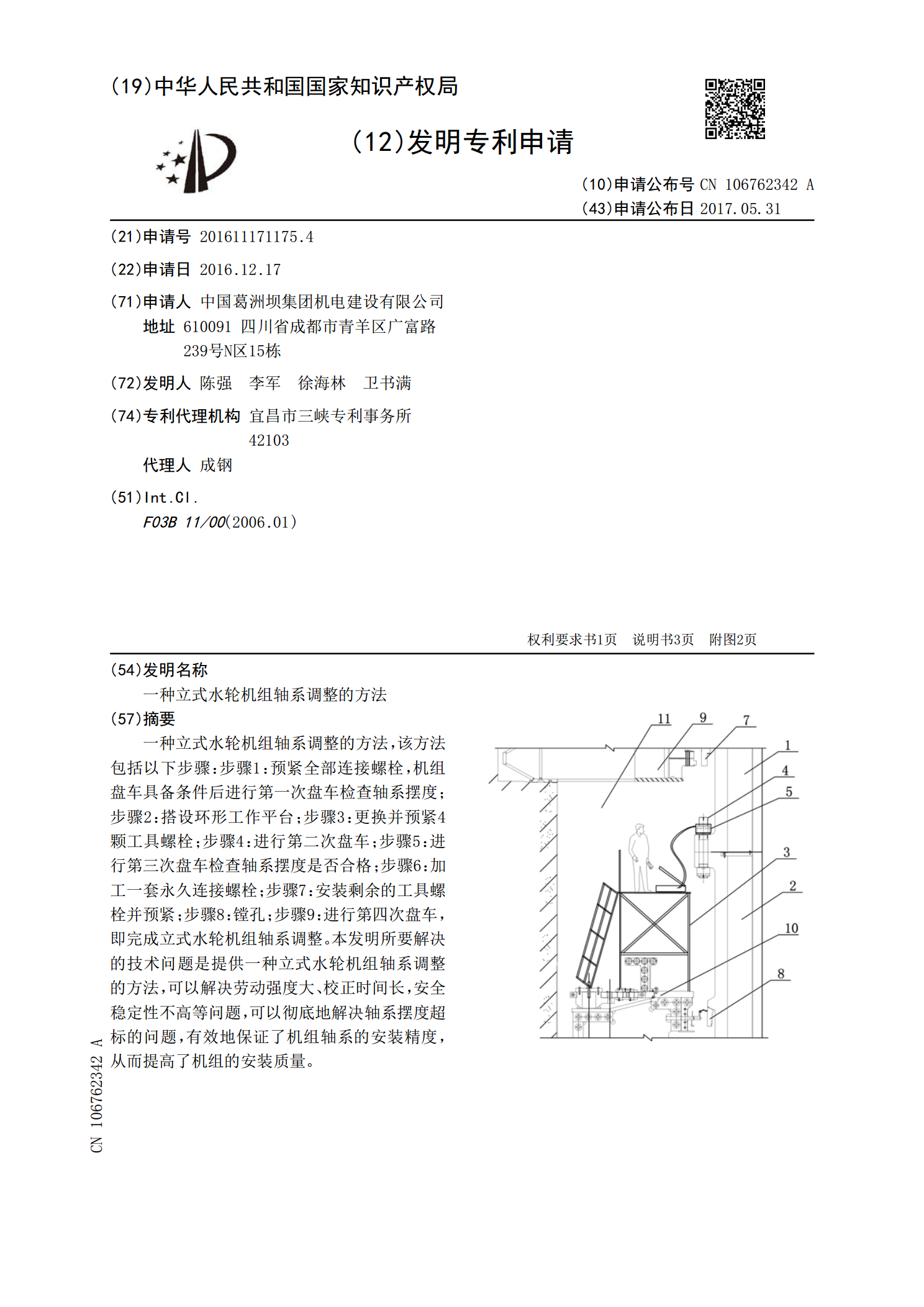
一种混流式水轮发电机组轴系调整方法及系统.pdf

白凡****12

1/10

2/10

3/10

4/10

5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共32页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种混流式水轮发电机组轴系调整方法及系统.pdf
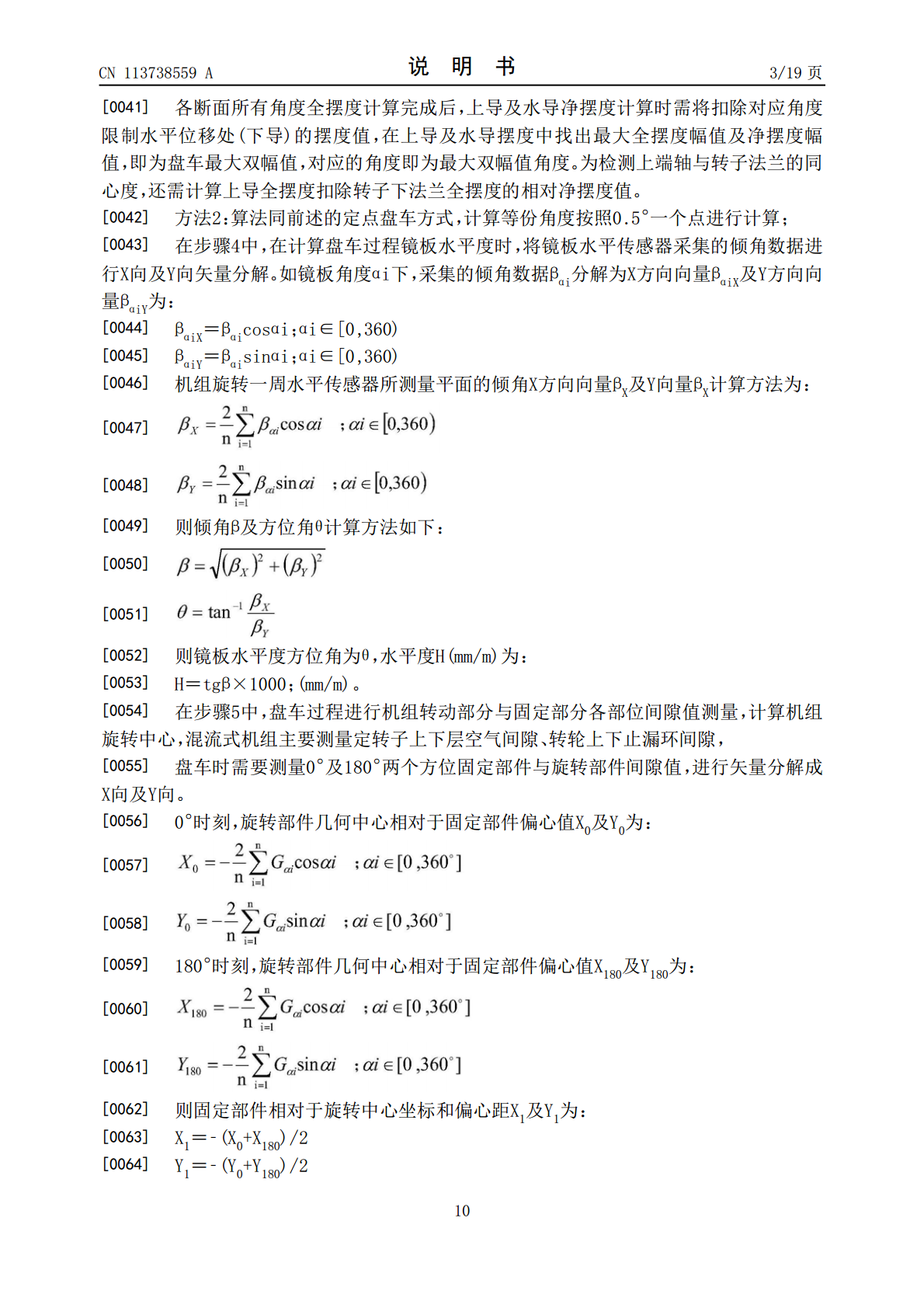
一种混流式水轮发电机组轴系调整方法及系统,其方法包括:步骤一:获取反映机组轴系状态的特征参数;步骤二:生成轴系调整方案;在步骤二中,包括以下步骤:步骤1:进行盘车相关数据的测量;步骤2:按主轴相位重采样;步骤3:获取盘车过程主轴的摆度;步骤4:获取盘车过程镜板水平度;步骤5:获取机组旋转中心数据;步骤6:获取轴系调整方案。本发明的目的是为了解决现有的对混流式立式水轮发电机组连续盘车中轴线调整时,存在的自动化程度低、人工测量/计算误差大的技术问题,并为了提高机组轴线调整的工作效率和调整精度、缩短检修工期,节
一种轴流转桨式水轮发电机组轴系调整方法及系统.pdf
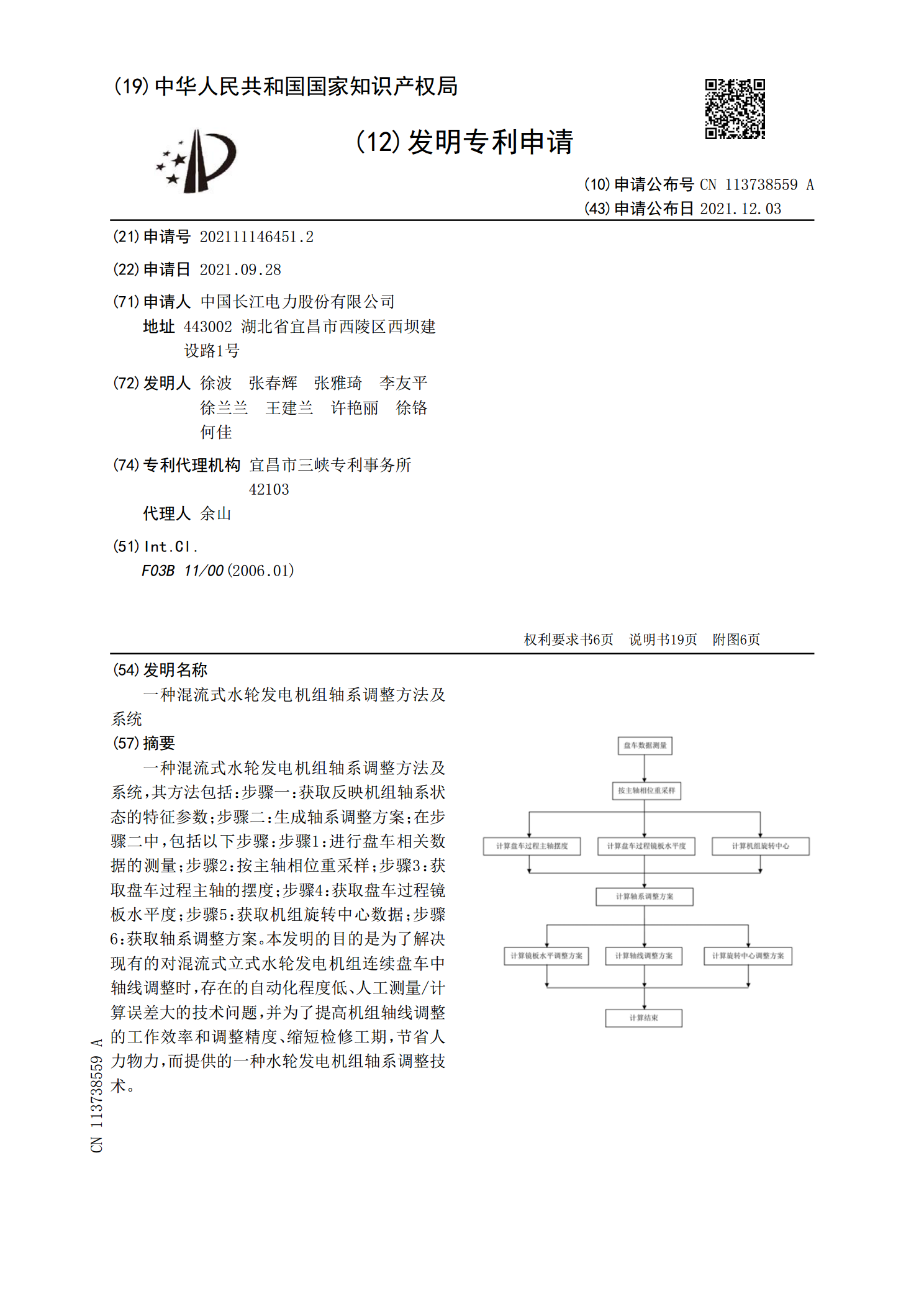
一种轴流转桨式水轮发电机组轴系调整方法及系统,其方法包括:步骤一:获取反映机组轴系状态的特征参数;步骤二:生成轴系调整方案;在步骤二中,包括以下步骤:步骤1:进行盘车相关数据的测量;步骤2:按主轴相位重采样;步骤3:获取盘车过程主轴的摆度;步骤4:获取盘车过程镜板水平度;步骤5:获取机组旋转中心数据;步骤6:获取轴系调整方案;本发明的目的是为了解决现有的对轴流转桨式水轮发电机组连续盘车中轴线调整时,存在的自动化程度低、人工测量/计算误差大的技术问题,并为了提高机组轴线调整的工作效率和调整精度、缩短检修工期
一种立式水轮机组轴系调整的方法.pdf
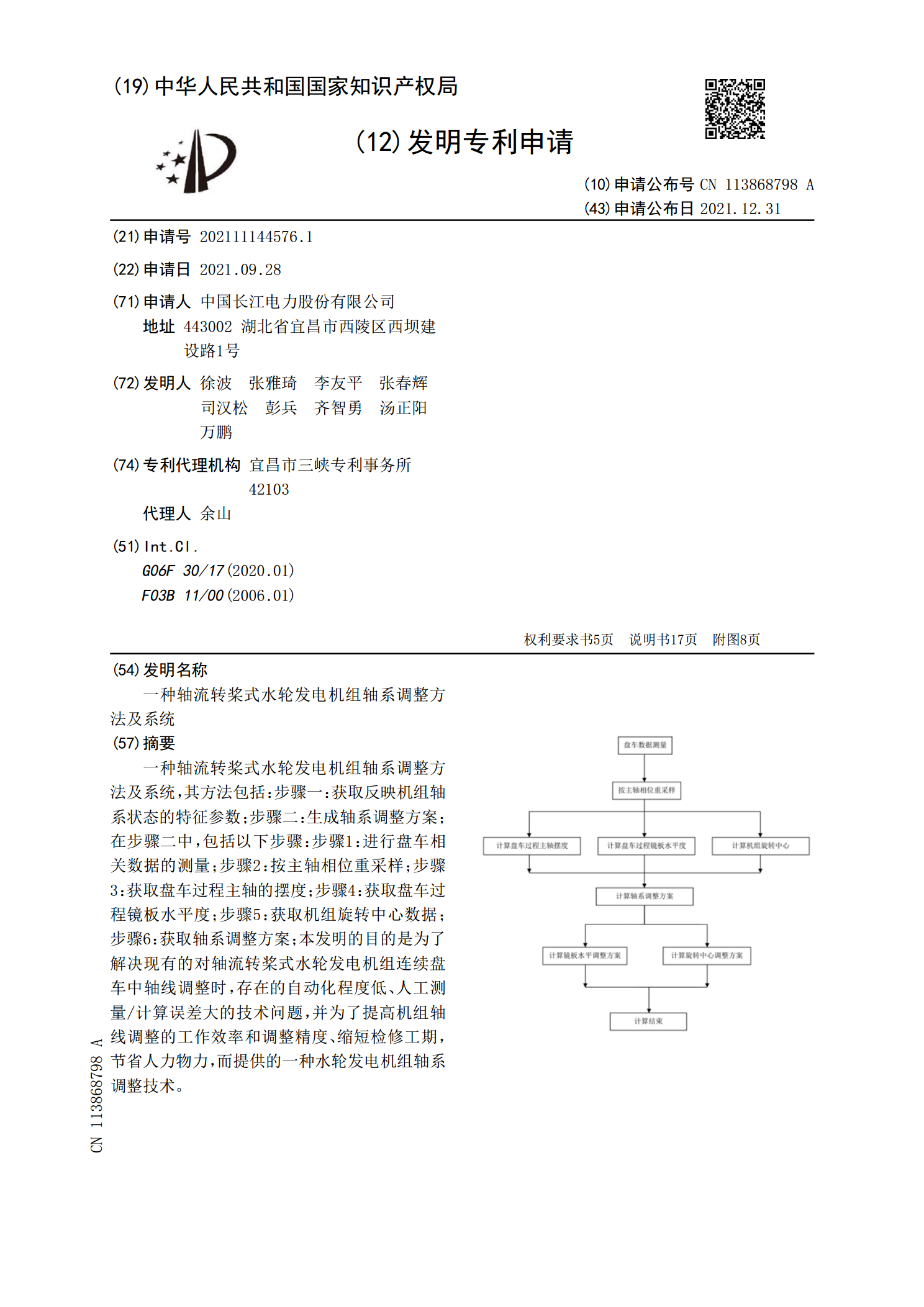
一种立式水轮机组轴系调整的方法,该方法包括以下步骤:步骤1:预紧全部连接螺栓,机组盘车具备条件后进行第一次盘车检查轴系摆度;步骤2:搭设环形工作平台;步骤3:更换并预紧4颗工具螺栓;步骤4:进行第二次盘车;步骤5:进行第三次盘车检查轴系摆度是否合格;步骤6:加工一套永久连接螺栓;步骤7:安装剩余的工具螺栓并预紧;步骤8:镗孔;步骤9:进行第四次盘车,即完成立式水轮机组轴系调整。本发明所要解决的技术问题是提供一种立式水轮机组轴系调整的方法,可以解决劳动强度大、校正时间长,安全稳定性不高等问题,可以彻底地解决

一种立式混流式水轮发电机组结构.pdf
一种立式混流式水轮发电机组结构,包括上下设置的发电机主轴和水轮机主轴,发电机主轴与水轮机主轴通过法兰连接,水轮机下部设有水导轴承,发电机主轴上端设有推力头,推力头包括上部和下部,推力头下部的直径大于推力头上部的直径,推力头下部的外侧设有上导轴承,推力头下部的下侧设有推力轴承。本发明立式混流式水轮发电机组结构的轴系采用两段轴两支点结构,缩短了主轴轴系长度,去掉了下导轴承,将上导轴承设置在推力头下部外侧,从而使上导轴承与水导轴承之间的距离缩短,有效的提高了结构的稳定性,成功的完成了现有卧式水轮发电机组的改造,

混流式水轮机.docx
第一节混流式水轮机结构一、概述混流式水轮机是反击式水轮机的一种,其应用水头范围很广,从20~700m水头均可使用。它结构简单,制造安装方便,运行可靠,且有较高的效率和较低的空蚀系数。现以图2-1所示的混流式水轮机为例来介绍这种水轮机结构。水轮机的进水部件是具有钢板里衬的蜗壳,座环支柱也称固定导叶1,在转轮四周布置着导水机构导叶2。座环支柱具有坚固的上环和下环,蜗壳和上下环焊接在一起。导叶轴颈用衬套(钢或尼龙材料)支承在底环3和固定于顶盖4的套筒5上。底环固定于座环的下环上面。顶盖用螺钉6与座环的上环连接。