
目标跟踪方法、跟踪装置及可读存储介质.pdf

猫巷****盟主


1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

目标跟踪方法、跟踪装置及可读存储介质.pdf
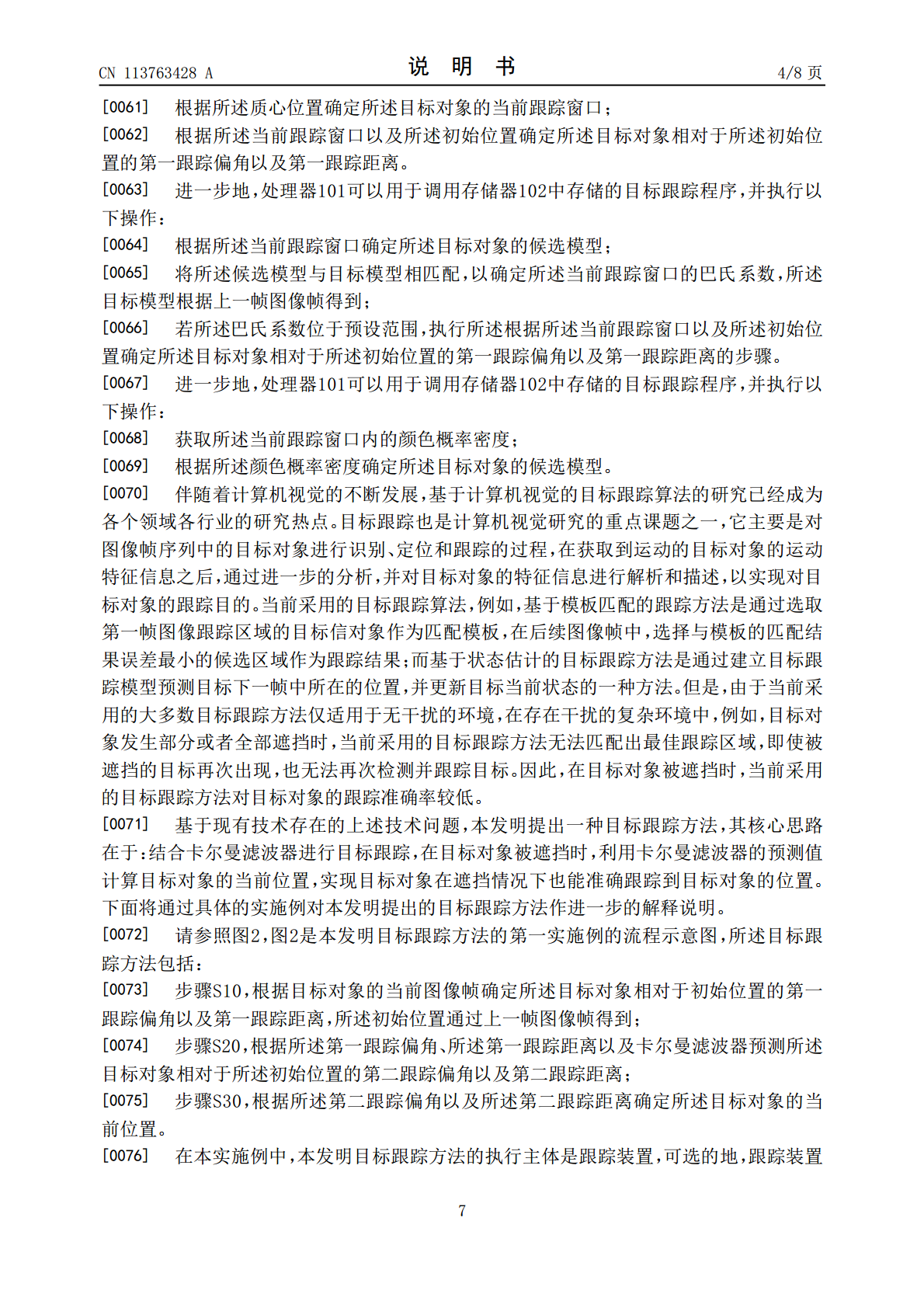
本发明公开了一种目标跟踪方法、跟踪装置及可读存储介质,所述目标跟踪方法包括以下步骤:根据目标对象的当前图像帧确定所述目标对象相对于初始位置的第一跟踪偏角以及第一跟踪距离,所述初始位置通过上一帧图像帧得到;根据所述第一跟踪偏角、所述第一跟踪距离以及卡尔曼滤波器预测所述目标对象相对于所述初始位置的第二跟踪偏角以及第二跟踪距离;根据所述第二跟踪偏角以及所述第二跟踪距离确定所述目标对象的当前位置。本发明能够提高目标对象被遮挡时的跟踪准确率。

目标跟踪方法、装置及可读存储介质.pdf
本发明公开了一种目标跟踪方法、装置及可读存储介质,该方法包括:获取待跟踪的视频序列中的第一帧图像;通过第一卷积神经网络对通用图像以及第一帧图像进行离线训练,以获得结构性特征;根据结构性特征生成用于对跟踪目标进行分类的分类器;获取待跟踪的视频序列中除第一帧图像以外的目标帧图像;将视频序列中的目标帧图像输入至分类器中进行分类,并通过第二深度卷积神经网络生成特征图;利用特征图以及上下文信息训练上下文滤波器以及尺度滤波器;将训练得到的上下文滤波器、尺度滤波器与特征图相结合,以对视频序列中目标帧图像的下一帧图像中的
目标跟踪方法、目标跟踪装置及计算机可读存储介质.pdf
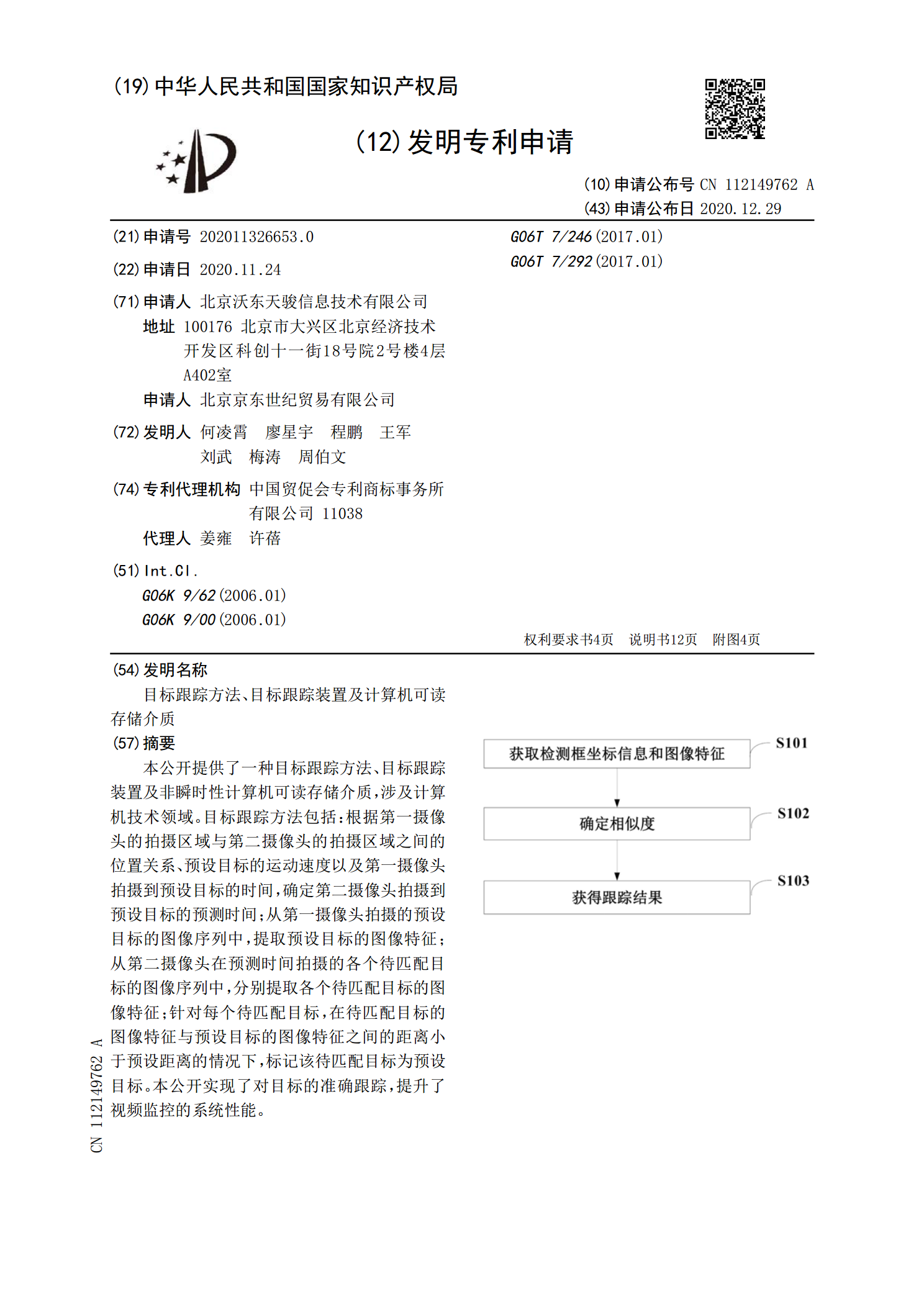
本公开提供了一种目标跟踪方法、目标跟踪装置及非瞬时性计算机可读存储介质,涉及计算机技术领域。目标跟踪方法包括:根据第一摄像头的拍摄区域与第二摄像头的拍摄区域之间的位置关系、预设目标的运动速度以及第一摄像头拍摄到预设目标的时间,确定第二摄像头拍摄到预设目标的预测时间;从第一摄像头拍摄的预设目标的图像序列中,提取预设目标的图像特征;从第二摄像头在预测时间拍摄的各个待匹配目标的图像序列中,分别提取各个待匹配目标的图像特征;针对每个待匹配目标,在待匹配目标的图像特征与预设目标的图像特征之间的距离小于预设距离的情况
目标跟踪方法、装置、电子设备及可读存储介质.pdf
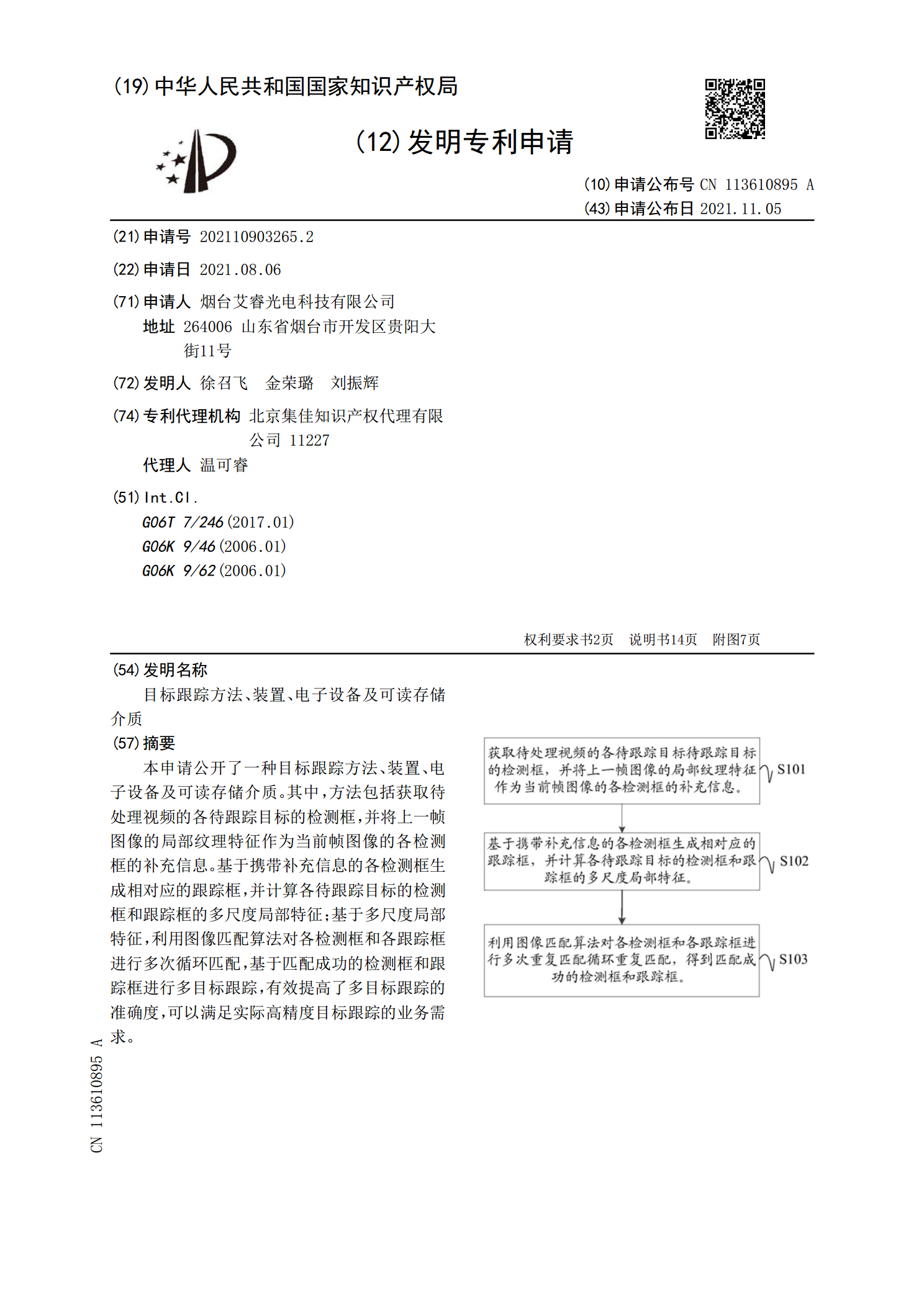
本申请公开了一种目标跟踪方法、装置、电子设备及可读存储介质。其中,方法包括获取待处理视频的各待跟踪目标的检测框,并将上一帧图像的局部纹理特征作为当前帧图像的各检测框的补充信息。基于携带补充信息的各检测框生成相对应的跟踪框,并计算各待跟踪目标的检测框和跟踪框的多尺度局部特征;基于多尺度局部特征,利用图像匹配算法对各检测框和各跟踪框进行多次循环匹配,基于匹配成功的检测框和跟踪框进行多目标跟踪,有效提高了多目标跟踪的准确度,可以满足实际高精度目标跟踪的业务需求。
目标跟踪方法、装置、电子设备及可读存储介质.pdf
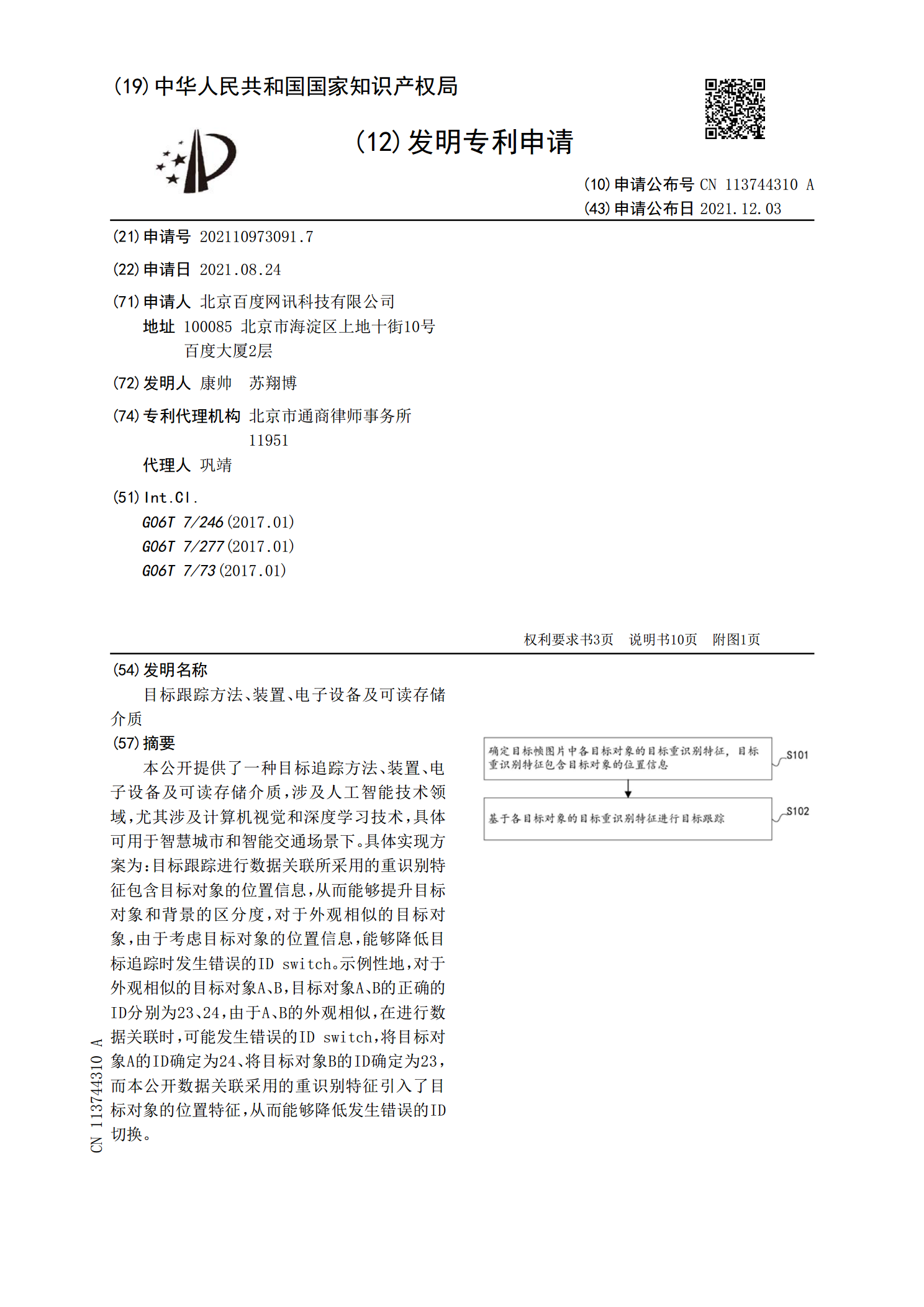
本公开提供了一种目标追踪方法、装置、电子设备及可读存储介质,涉及人工智能技术领域,尤其涉及计算机视觉和深度学习技术,具体可用于智慧城市和智能交通场景下。具体实现方案为:目标跟踪进行数据关联所采用的重识别特征包含目标对象的位置信息,从而能够提升目标对象和背景的区分度,对于外观相似的目标对象,由于考虑目标对象的位置信息,能够降低目标追踪时发生错误的IDswitch。示例性地,对于外观相似的目标对象A、B,目标对象A、B的正确的ID分别为23、24,由于A、B的外观相似,在进行数据关联时,可能发生错误的ID