
一种基于机器视觉的布料表面缺陷检测装置及方法.pdf

高格****gu

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于机器视觉的布料表面缺陷检测装置及方法.pdf
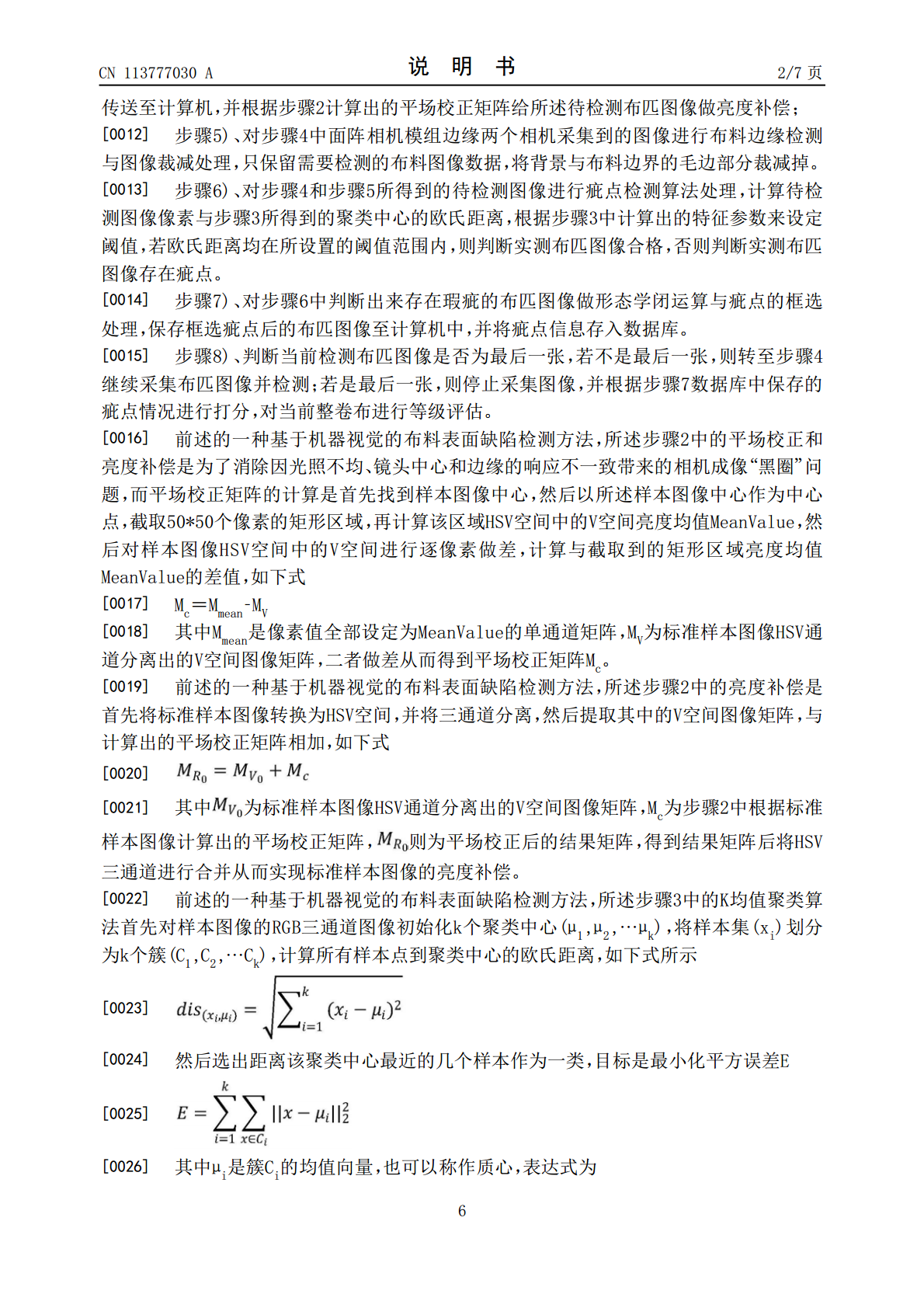
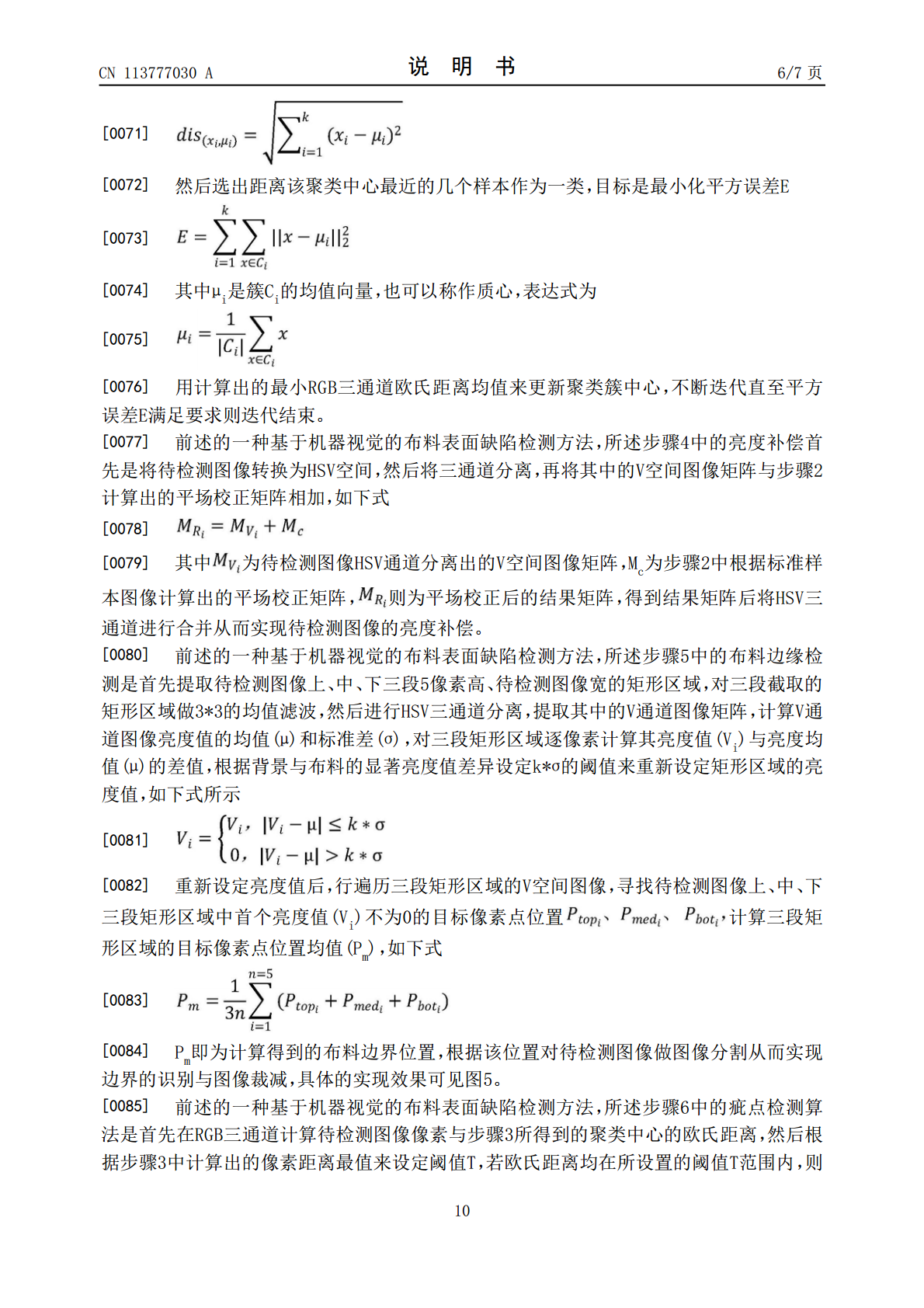
本发明公开了一种基于机器视觉的布料表面缺陷检测装置及方法,检测装置分模块组装,包括预处理模块,视觉检测模块和收卷模块;利用视觉检测模块里的面阵相机模组拍摄无疵点的布匹图像作为标准样本,根据标准样本计算平场校正矩阵并实现亮度补偿;采用K均值聚类算法的原理计算标准样本的聚类中心及其他特征参数;面阵相机模组实时拍摄待测布匹并进行平场校正;根据背景与布匹图像的亮度值差异实现边缘检测和区域裁减;计算待测图像像素到聚类中心的欧氏距离并根据阈值判定是否存在疵点;如有则保存疵点图像。本发明克服了传统人工目测检测速度慢、精
一种基于机器视觉的芯片表面缺陷检测装置及其检测方法.pdf
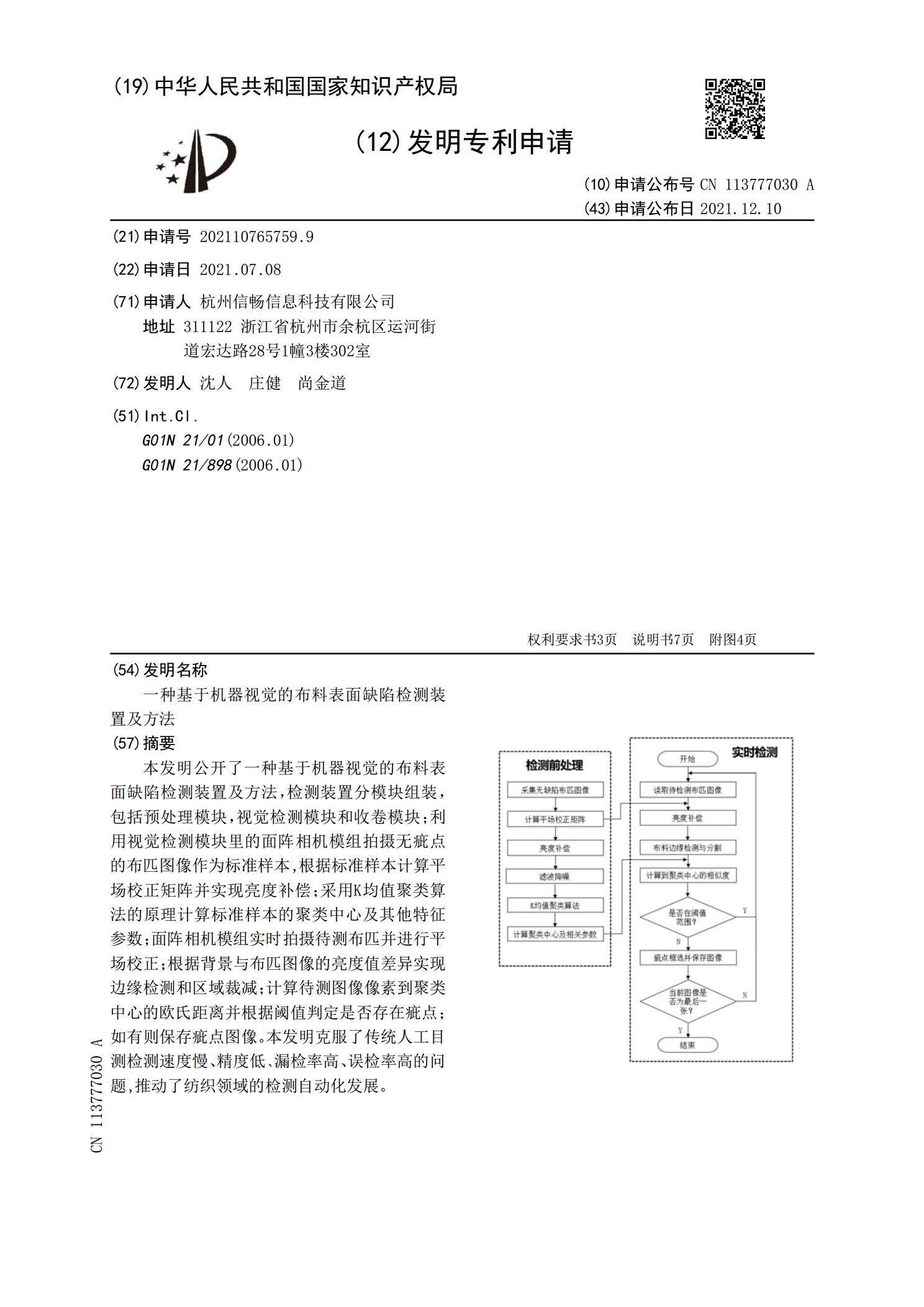
本发明属于视觉设备表面清洁技术领域,具体涉及一种基于机器视觉的芯片表面缺陷检测装置及其检测方法,包括视觉检测设备,应用于芯片检测,所述视觉检测设备用于对芯片表面缺陷进行检测,其中,所述视觉检测设备包括视觉检测组件,包括清洁部,清洁部设置于视觉检测组件的光源发出侧,且视觉检测组件运行时,清洁部在视觉检测组件的检测范围之外;驱动机构,驱动机构设置在清洁部的一侧,用于驱动清洁部运动;供气部,供气部装配在视觉检测设备上,采用上述方案来对芯片缺陷进行检测,能够合理的利用视觉检测组件停机或工作间歇,相较于目前的常规检
一种基于机器视觉的物体表面缺陷检测装置.pdf
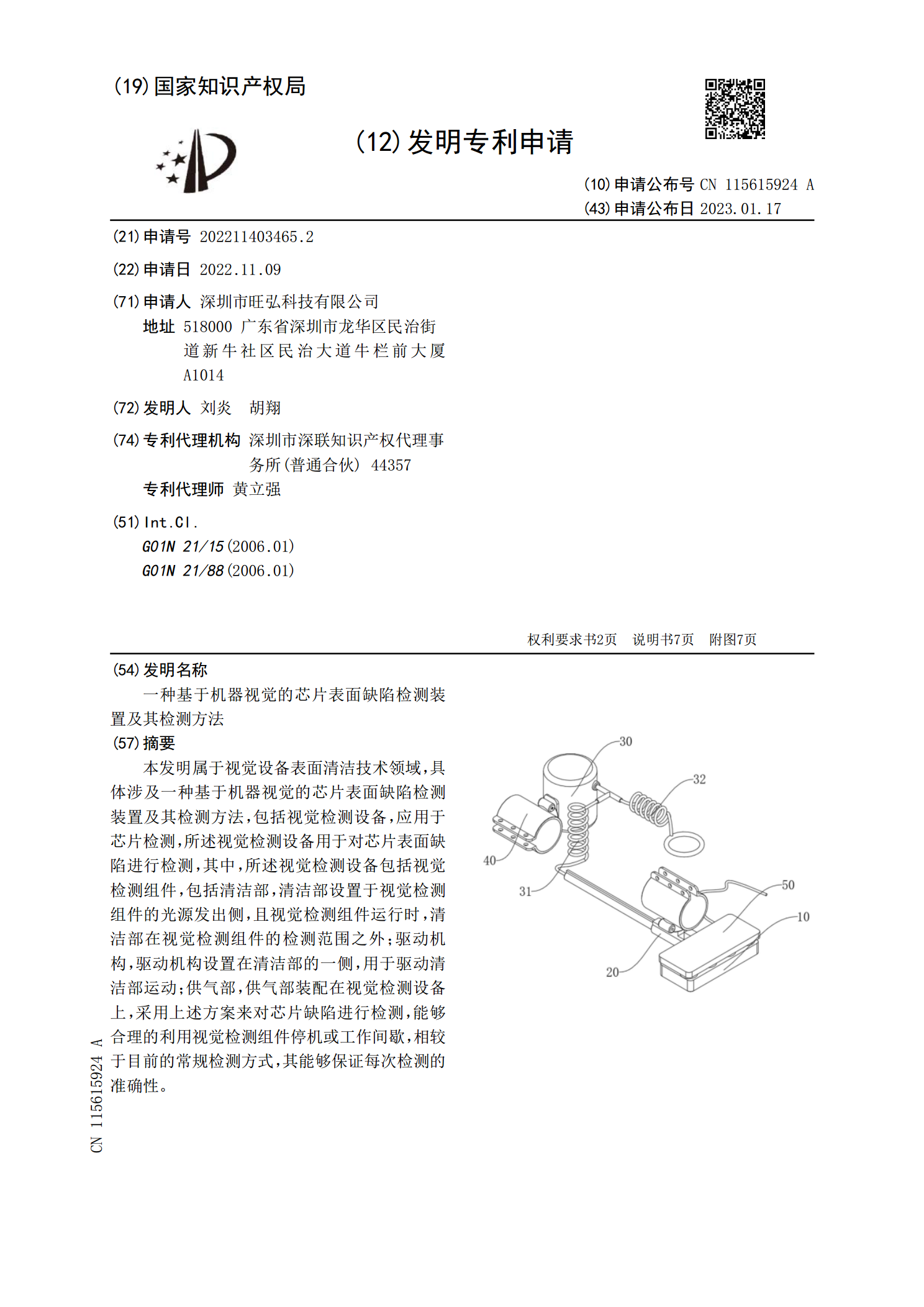
本发明公开了一种基于机器视觉的物体表面缺陷检测装置,具体包括:固定座,该固定座顶部固定连接有放置台,所述放置台外侧套设并转动连接有定位圈;减震装置,该减震装置设置在定位圈上方,所述减震装置底部通过支杆与定位圈顶部固定连接;转动装置,该转动装置设置在放置台上方,所述转动装置外侧套设并固定连接有固定架,所述固定架底部与固定座侧面固定连接,所述固定架顶部通过支架固定连接有驱动电机,所述减震装置包括:固定支座,本发明涉及物体表面缺陷检测技术领域。该一种基于机器视觉的物体表面缺陷检测装置,可对物体水平方向的各个侧面
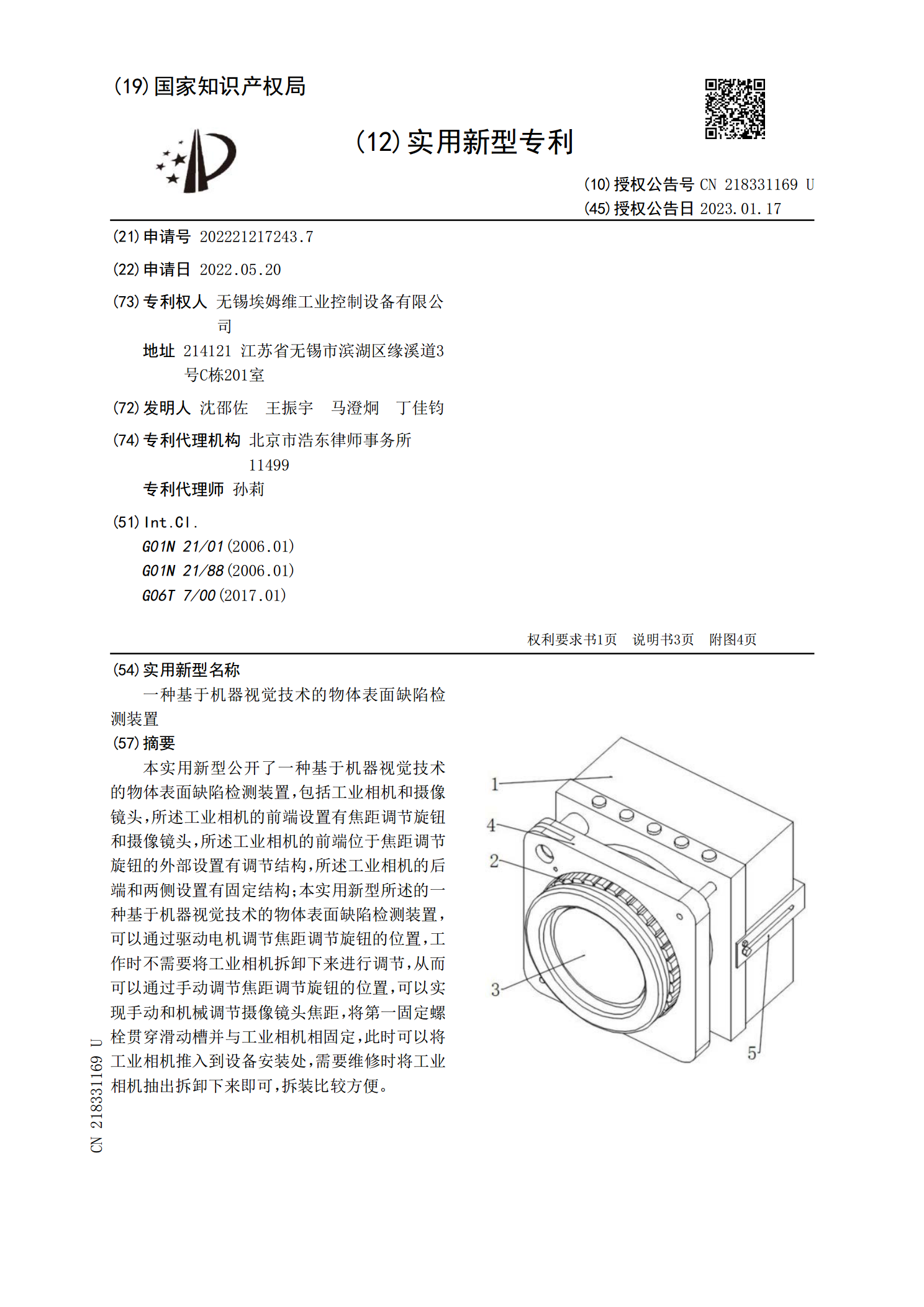
一种基于机器视觉技术的物体表面缺陷检测装置.pdf
本实用新型公开了一种基于机器视觉技术的物体表面缺陷检测装置,包括工业相机和摄像镜头,所述工业相机的前端设置有焦距调节旋钮和摄像镜头,所述工业相机的前端位于焦距调节旋钮的外部设置有调节结构,所述工业相机的后端和两侧设置有固定结构;本实用新型所述的一种基于机器视觉技术的物体表面缺陷检测装置,可以通过驱动电机调节焦距调节旋钮的位置,工作时不需要将工业相机拆卸下来进行调节,从而可以通过手动调节焦距调节旋钮的位置,可以实现手动和机械调节摄像镜头焦距,将第一固定螺栓贯穿滑动槽并与工业相机相固定,此时可以将工业相机推入
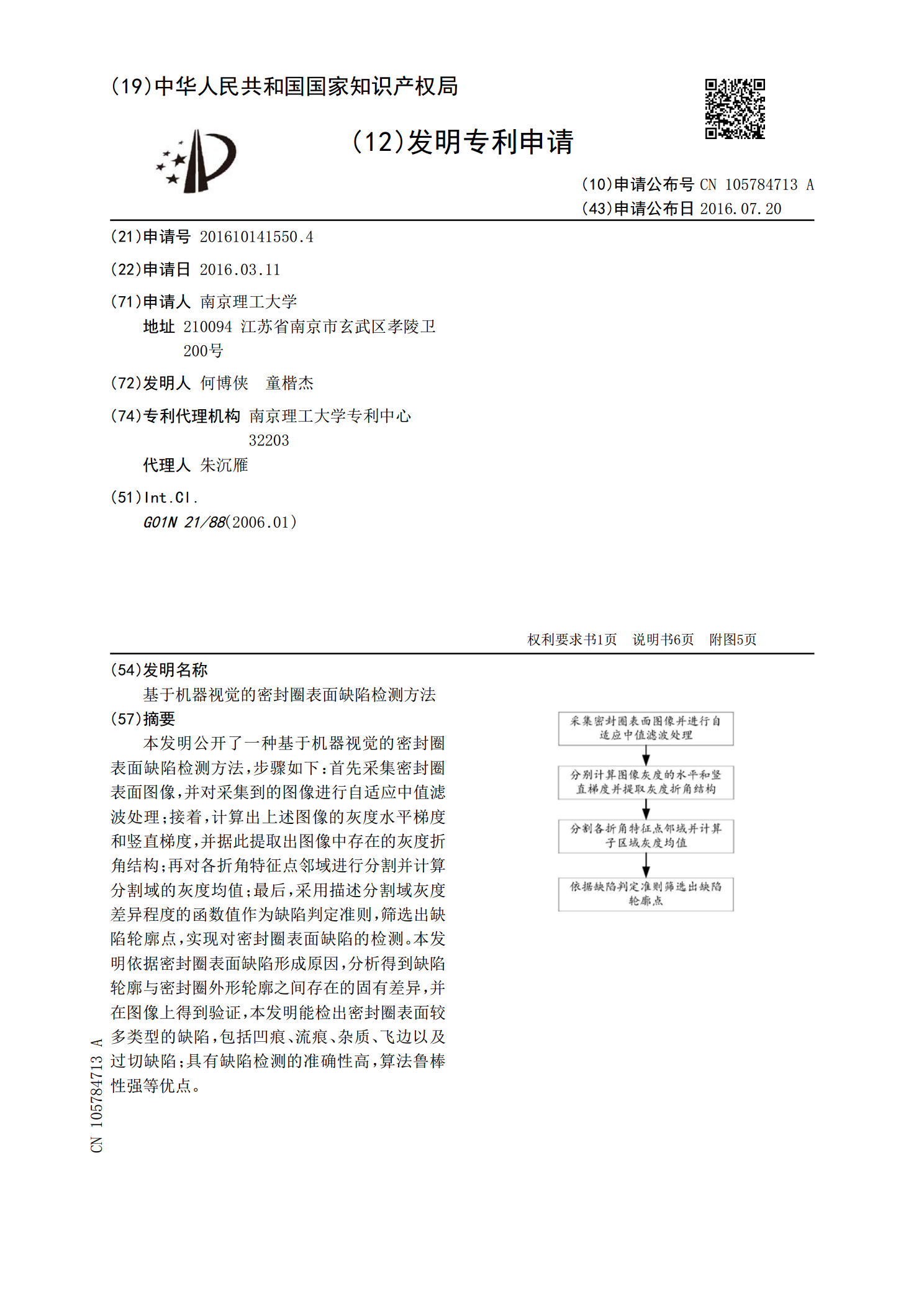
基于机器视觉的密封圈表面缺陷检测方法.pdf
本发明公开了一种基于机器视觉的密封圈表面缺陷检测方法,步骤如下:首先采集密封圈表面图像,并对采集到的图像进行自适应中值滤波处理;接着,计算出上述图像的灰度水平梯度和竖直梯度,并据此提取出图像中存在的灰度折角结构;再对各折角特征点邻域进行分割并计算分割域的灰度均值;最后,采用描述分割域灰度差异程度的函数值作为缺陷判定准则,筛选出缺陷轮廓点,实现对密封圈表面缺陷的检测。本发明依据密封圈表面缺陷形成原因,分析得到缺陷轮廓与密封圈外形轮廓之间存在的固有差异,并在图像上得到验证,本发明能检出密封圈表面较多类型的缺陷