
基于MPC算法的防侧倾控制方法、设备及存储介质.pdf

戊午****jj

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于MPC算法的防侧倾控制方法、设备及存储介质.pdf
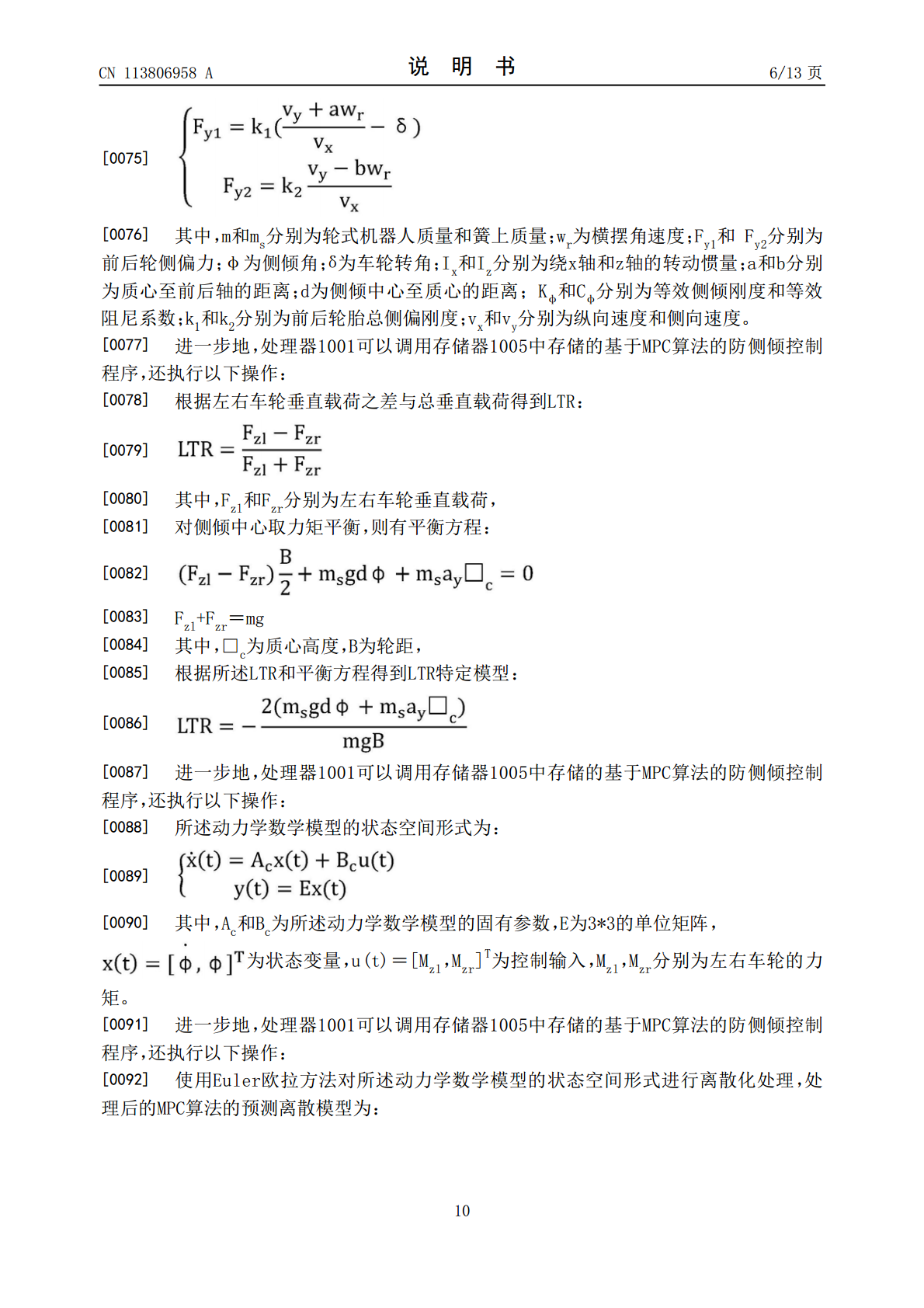
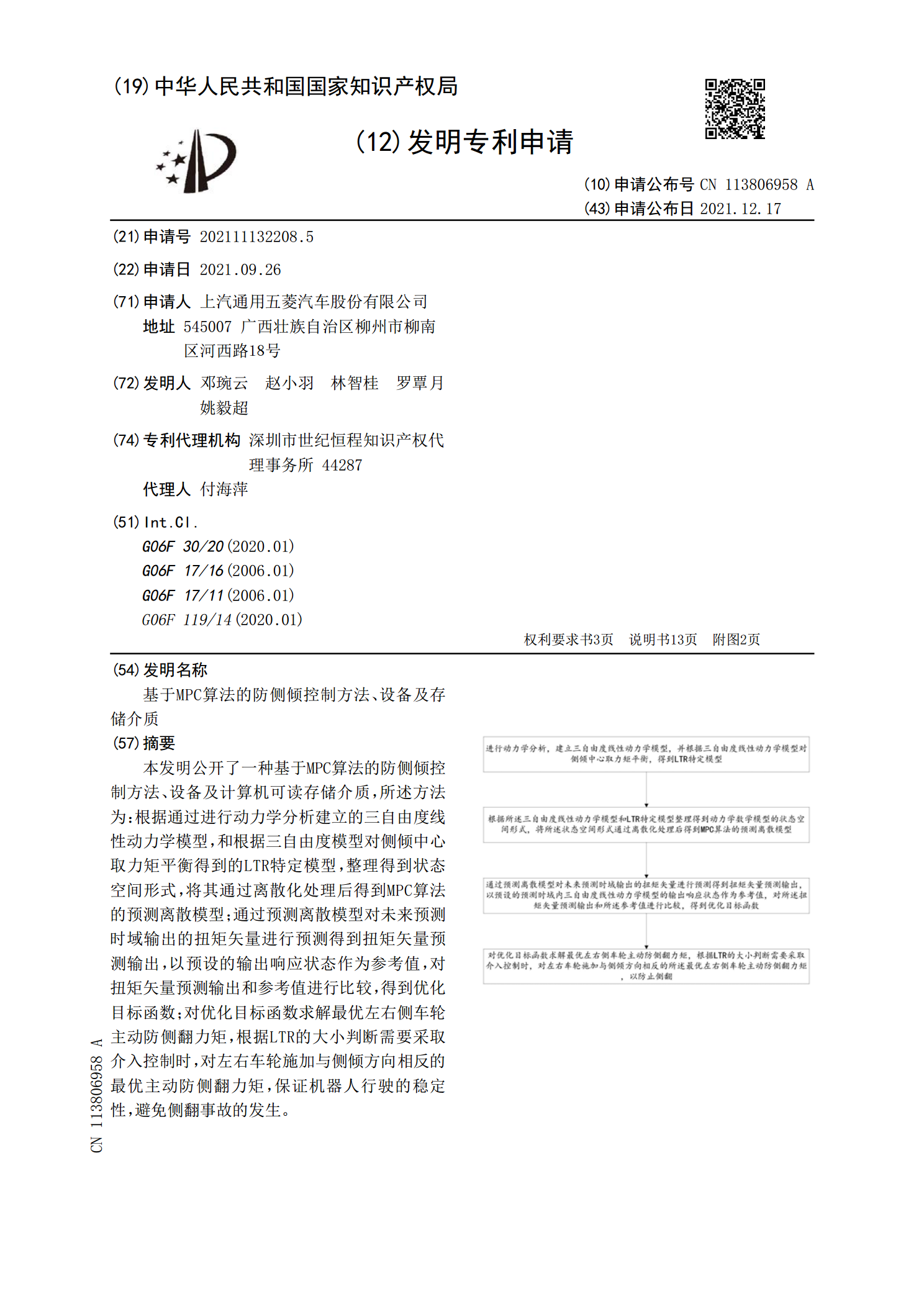
本发明公开了一种基于MPC算法的防侧倾控制方法、设备及计算机可读存储介质,所述方法为:根据通过进行动力学分析建立的三自由度线性动力学模型,和根据三自由度模型对侧倾中心取力矩平衡得到的LTR特定模型,整理得到状态空间形式,将其通过离散化处理后得到MPC算法的预测离散模型;通过预测离散模型对未来预测时域输出的扭矩矢量进行预测得到扭矩矢量预测输出,以预设的输出响应状态作为参考值,对扭矩矢量预测输出和参考值进行比较,得到优化目标函数;对优化目标函数求解最优左右侧车轮主动防侧翻力矩,根据LTR的大小判断需要采取介入
清扫车及其防侧倾控制方法、装置和存储介质.pdf
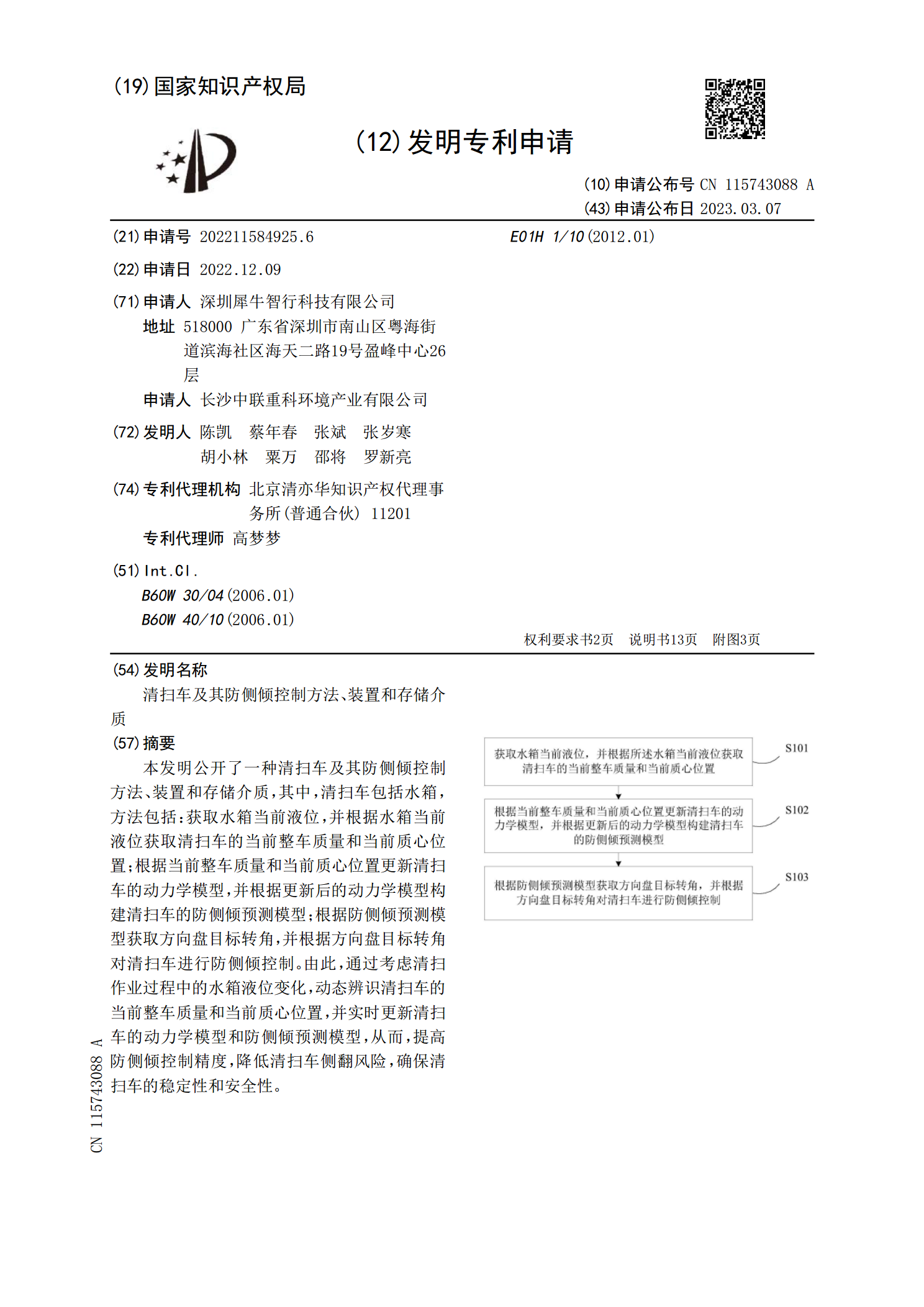
本发明公开了一种清扫车及其防侧倾控制方法、装置和存储介质,其中,清扫车包括水箱,方法包括:获取水箱当前液位,并根据水箱当前液位获取清扫车的当前整车质量和当前质心位置;根据当前整车质量和当前质心位置更新清扫车的动力学模型,并根据更新后的动力学模型构建清扫车的防侧倾预测模型;根据防侧倾预测模型获取方向盘目标转角,并根据方向盘目标转角对清扫车进行防侧倾控制。由此,通过考虑清扫作业过程中的水箱液位变化,动态辨识清扫车的当前整车质量和当前质心位置,并实时更新清扫车的动力学模型和防侧倾预测模型,从而,提高防侧倾控制精

基于主动横向稳定杆的汽车防侧倾控制策略及算法研究.pptx
汇报人:目录PARTONE主动横向稳定杆的工作原理主动横向稳定杆在汽车防侧倾中的作用主动横向稳定杆的优势和局限性PARTTWO汽车防侧倾控制策略的分类主动横向稳定杆防侧倾控制策略的原理主动横向稳定杆防侧倾控制策略的实现方法PARTTHREE算法设计思路算法实现过程算法测试和验证PARTFOUR应用场景和案例介绍应用效果评估和比较应用中存在的问题和改进方向PARTFIVE基于主动横向稳定杆的防侧倾控制策略和算法的进一步研究其他新型汽车防侧倾技术的探索和研究汽车防侧倾技术的实际应用前景和展望THANKYOU

基于主动横向稳定杆的汽车防侧倾控制策略及算法研究.docx
基于主动横向稳定杆的汽车防侧倾控制策略及算法研究Title:ResearchonCarAnti-rolloverControlStrategyandAlgorithmBasedonActiveLateralStabilizerBarAbstract:Carrolloverduringcorneringhasalwaysbeenamajorsafetyconcernforautomotivemanufacturersandresearchers.Toaddressthisissue,anactiveanti

基于侧行链路的设备间协作方法、装置、设备及存储介质.pdf
本公开实施例公开了一种基于侧行链路的设备间协作方法、装置、设备及存储介质,可以应用于通信系统中,该方法由第一终端设备执行时包括:接收第二终端设备发送的第一信息,第一信息用于触发终端设备间协作IUC功能,如果第一终端设备为第一资源分配模式,则向网络设备发送第二信息,第二信息用于向网络设备请求配置第一终端设备为第二资源分配模式。通过实施本公开的方法,使得终端设备间协作IUC功能能够有效执行,提升基于侧行链路的设备间协作的效果。