
一种基于垂直车位的自动泊车方法.pdf

安双****文章


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于垂直车位的自动泊车方法.pdf
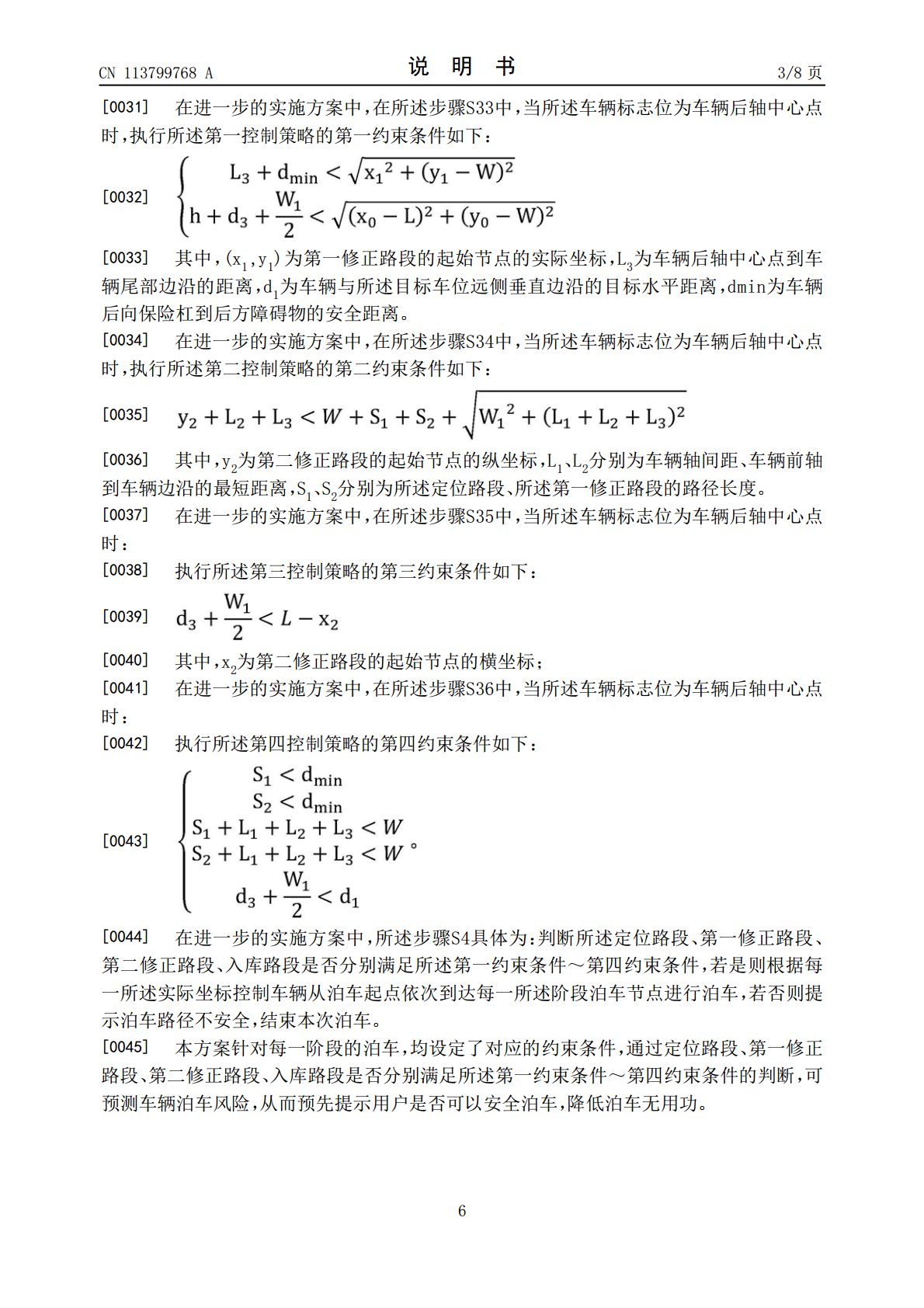
本发明涉及自动泊车控制技术领域,提供一种基于垂直车位的自动泊车方法,在进行泊车之初,预先判断当前泊车空间是否满足垂直倒车入库条件,从而可为用户确定最优的泊车路线;随后根据泊车环境数据确定目标车位,并建立泊车坐标系,使得空间环境数据化;此时,根据预先设计的多段规划策略对泊车路径进行多段式规划,计算预定义的每一泊车阶段中阶段泊车节点的实际坐标,从而通过控制车辆依次到达每一阶段泊车节点,即可完成泊车,设计“后退‑前进‑后退”的多段式垂直泊车入库,可降低泊车空间需求,提高泊车成功率。
针对狭窄垂直车位的自动泊车轨迹规划方法及电子设备.pdf
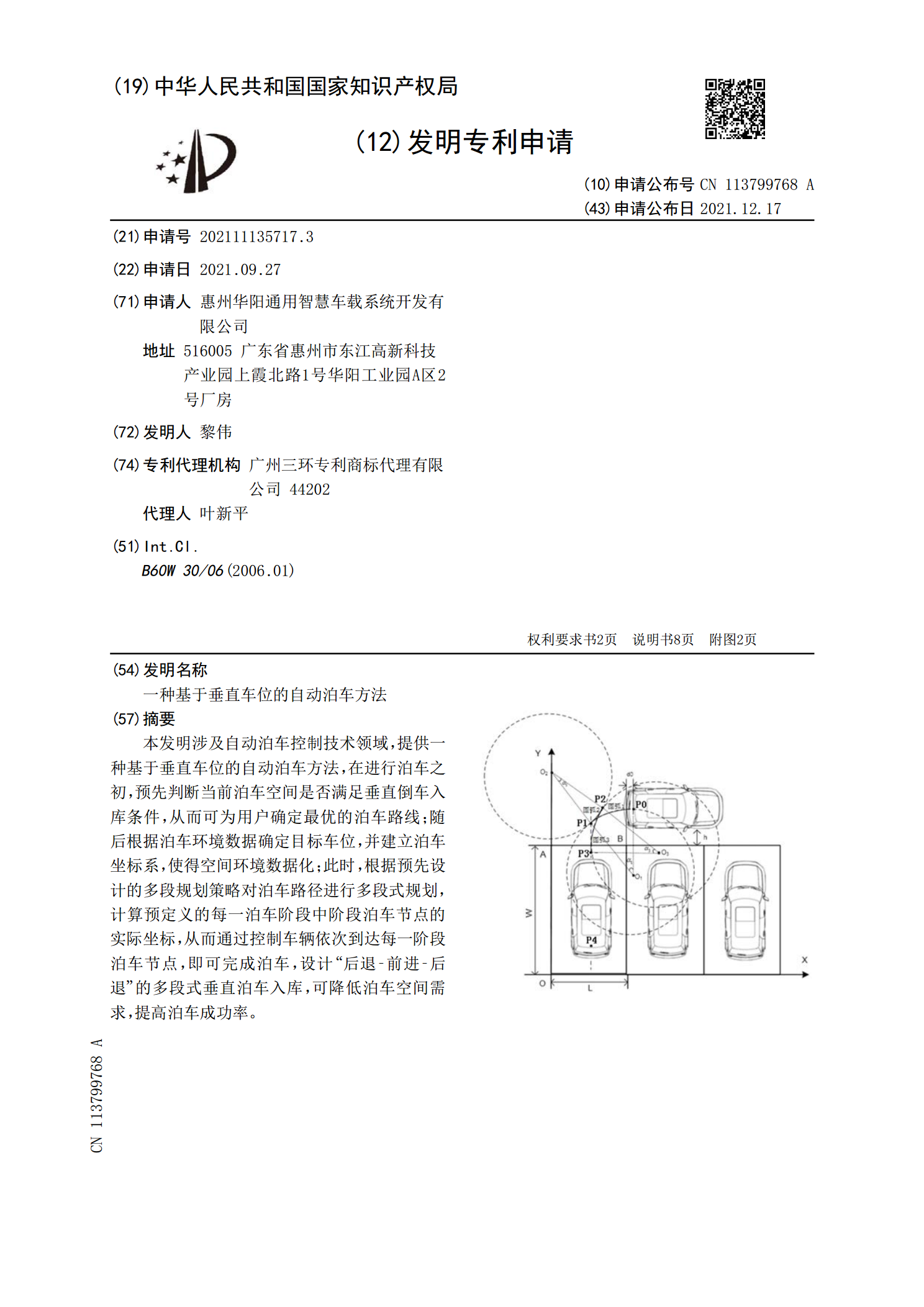
本发明公开了一种针对狭窄垂直车位的自动泊车轨迹规划方法及电子设备,包括如下步骤:根据车辆感知信息,划定能够接管车辆完成自动泊车的初始范围;根据车辆与车位之间的相对位置,建立坐标系,导入车辆周围环境的参数模型;基于五次多项式完成第一段轨迹规划,使得车辆行驶至能够一次泊入的位置;基于几何法和三次多项式耦合的方式依次完成第二段轨迹规划和第三段规划,使得车辆由能够一次泊入的位置一次泊入车位,再最终停在车位正中间的位置;最后将计算得到的轨迹信息以矩阵的形式输出,为车辆的控制提供数据。避免多次前后腾挪和档位切换,最大

基于车位场景智能识别技术的全自动垂直泊车系统研究.doc
基于车位场景智能识别技术的全自动垂直泊车系统研究近年来自动泊车技术作为一项重要的驾驶辅助技术成为汽车工程技术领域的研究热点。目前正在逐步推广应用的半自动泊车系统仍需要驾驶员来控制车速、档位和制动,智能化程度还需进一步提高;在垂直泊车时,为避免泊入车位后由于侧方空间过小导致驾驶员无法开启车门的问题,在识别有效车位时采取十分保守的策略(即设定的车位宽度裕量过大),导致一些相对较狭的有效车位不能被泊车系统所识别,因而降低了有效车位的利用率。为了提高有效车位利用率、停取车便利性以及泊车系统的智能化、自动化水平,本

一种基于目标停车位出库的自动泊车轨迹规划方法.pdf
本发明公开了一种基于目标停车位出库的自动泊车轨迹规划方法,本发明通过采用超声波以及环视相机融合的传感器方案,提高了检测范围,以及检测精度;并且使用假想目标车位泊车方式生成多段泊车轨迹,既能减小泊车空间,该轨迹又可以在自动泊出车库时复用,节省了研发成本提高了泊车精度。

基于图像梯度匹配的自动泊车系统车位识别方法.docx
基于图像梯度匹配的自动泊车系统车位识别方法摘要自动泊车系统在现代汽车中得到广泛应用,但是车位识别一直是许多自动泊车系统的瓶颈问题。本文提出了一种基于图像梯度匹配的车位识别方法,通过利用车位边缘的梯度信息,实现了对车位的自动识别和定位。实验结果表明,该方法可以实现高效准确的车位识别,为自动泊车系统的进一步发展提供了新的思路和方法。关键词:自动泊车系统,车位识别,图像梯度匹配AbstractAutomaticparkingsystemhasbeenwidelyusedinmoderncars,butparki