
基于车位场景智能识别技术的全自动垂直泊车系统研究.doc

雨巷****碧易


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于车位场景智能识别技术的全自动垂直泊车系统研究.doc
基于车位场景智能识别技术的全自动垂直泊车系统研究近年来自动泊车技术作为一项重要的驾驶辅助技术成为汽车工程技术领域的研究热点。目前正在逐步推广应用的半自动泊车系统仍需要驾驶员来控制车速、档位和制动,智能化程度还需进一步提高;在垂直泊车时,为避免泊入车位后由于侧方空间过小导致驾驶员无法开启车门的问题,在识别有效车位时采取十分保守的策略(即设定的车位宽度裕量过大),导致一些相对较狭的有效车位不能被泊车系统所识别,因而降低了有效车位的利用率。为了提高有效车位利用率、停取车便利性以及泊车系统的智能化、自动化水平,本
一种基于垂直车位的自动泊车方法.pdf
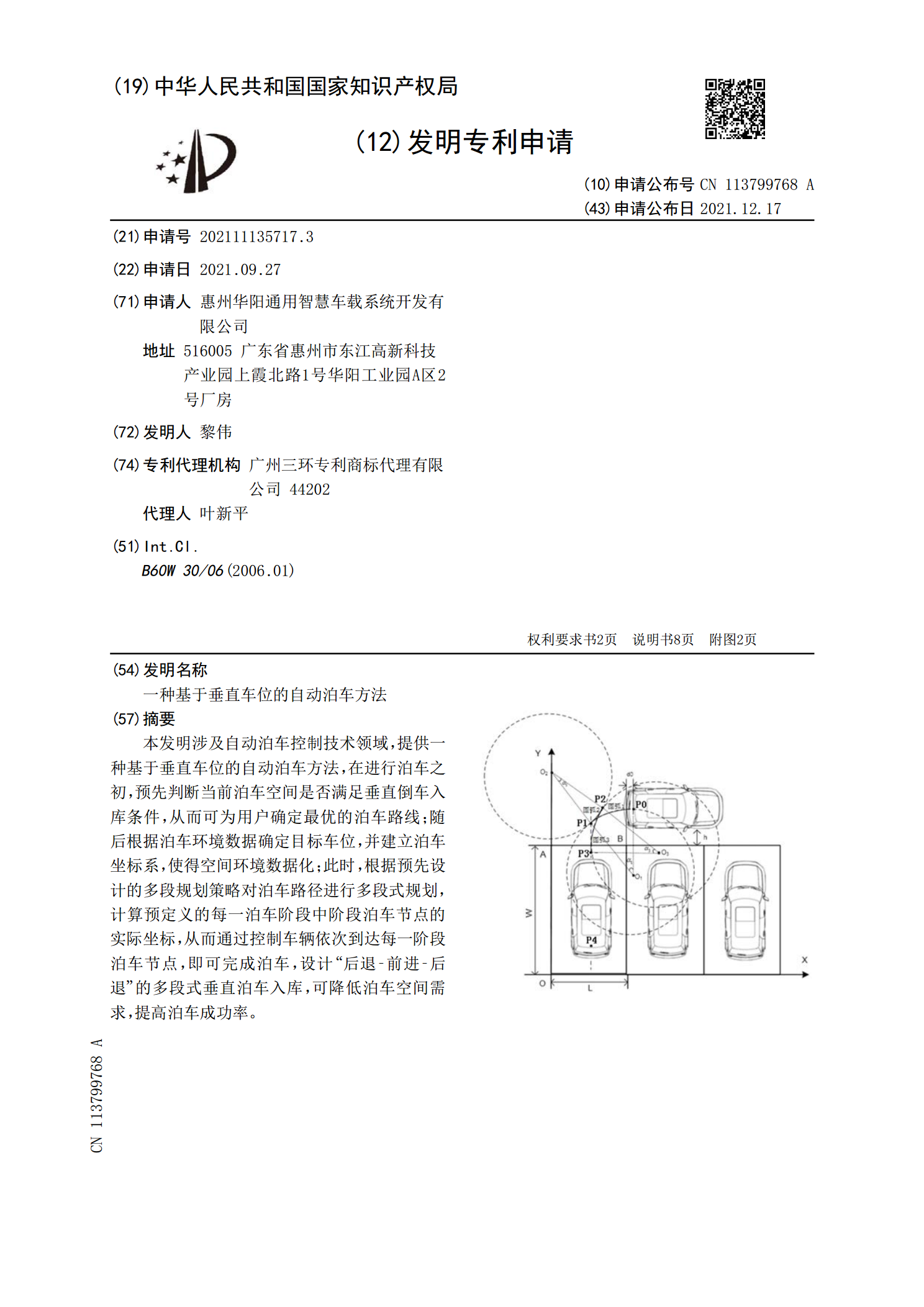
本发明涉及自动泊车控制技术领域,提供一种基于垂直车位的自动泊车方法,在进行泊车之初,预先判断当前泊车空间是否满足垂直倒车入库条件,从而可为用户确定最优的泊车路线;随后根据泊车环境数据确定目标车位,并建立泊车坐标系,使得空间环境数据化;此时,根据预先设计的多段规划策略对泊车路径进行多段式规划,计算预定义的每一泊车阶段中阶段泊车节点的实际坐标,从而通过控制车辆依次到达每一阶段泊车节点,即可完成泊车,设计“后退‑前进‑后退”的多段式垂直泊车入库,可降低泊车空间需求,提高泊车成功率。

基于图像梯度匹配的自动泊车系统车位识别方法.docx
基于图像梯度匹配的自动泊车系统车位识别方法摘要自动泊车系统在现代汽车中得到广泛应用,但是车位识别一直是许多自动泊车系统的瓶颈问题。本文提出了一种基于图像梯度匹配的车位识别方法,通过利用车位边缘的梯度信息,实现了对车位的自动识别和定位。实验结果表明,该方法可以实现高效准确的车位识别,为自动泊车系统的进一步发展提供了新的思路和方法。关键词:自动泊车系统,车位识别,图像梯度匹配AbstractAutomaticparkingsystemhasbeenwidelyusedinmoderncars,butparki

基于5G移动智能泊车提示系统研究.pptx
汇报人:CONTENTS添加章节标题5G移动智能泊车提示系统的概述定义和功能系统组成和工作原理泊车提示系统的应用场景5G技术在智能泊车提示系统中的应用5G技术介绍5G技术在泊车提示系统中的应用方式5G技术对智能泊车提示系统的影响智能泊车提示系统的实现方式基于图像识别的泊车提示系统基于超声波传感器的泊车提示系统基于雷达传感器的泊车提示系统基于激光扫描的泊车提示系统智能泊车提示系统的优势和挑战优势分析面临的挑战解决方案和未来发展方向智能泊车提示系统的实际应用案例案例一:某大型商场的地下停车场案例二:某住宅小区

垂直式停车位泊车技巧.docx
垂直式停车位泊车技巧垂直式停车位泊车技巧垂直式停车位泊车技巧。在绝大多数地下停车场中都提供垂直式停车位。这种车位,其优点有二:一是利用率高,不会有太多的空间浪费;二是泊车难度要低于水平车位,能大幅节省泊车时间。那么垂直车位该如何停?步骤/方法1:垂直式停车位泊车技巧。遇见垂直车位,且目标车位两边比较空,不少车主会将车直接停进去,结果是“车头朝里,屁股朝外”。这种停法胜在简单快捷,但缺点不少。首先是当你要将车开出来时,视线会被两侧车辆阻挡,看不清外面是否有车路过,增加风险性;其次是车头朝里,给小偷提供了更多