
智能体动作的确定方法和装置、电子设备和介质.pdf

Wi****m7

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共34页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
智能体动作的确定方法和装置、电子设备和介质.pdf
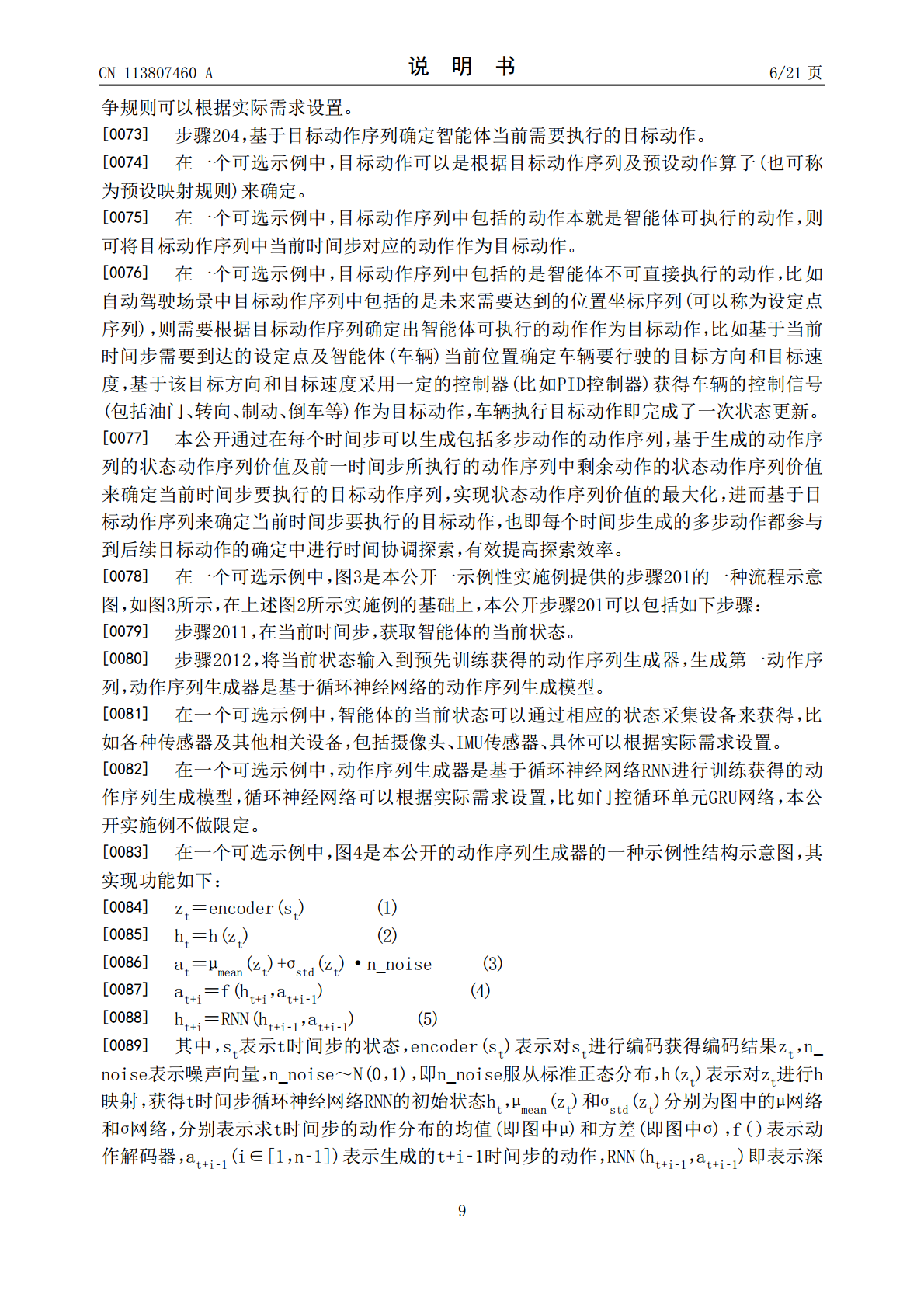
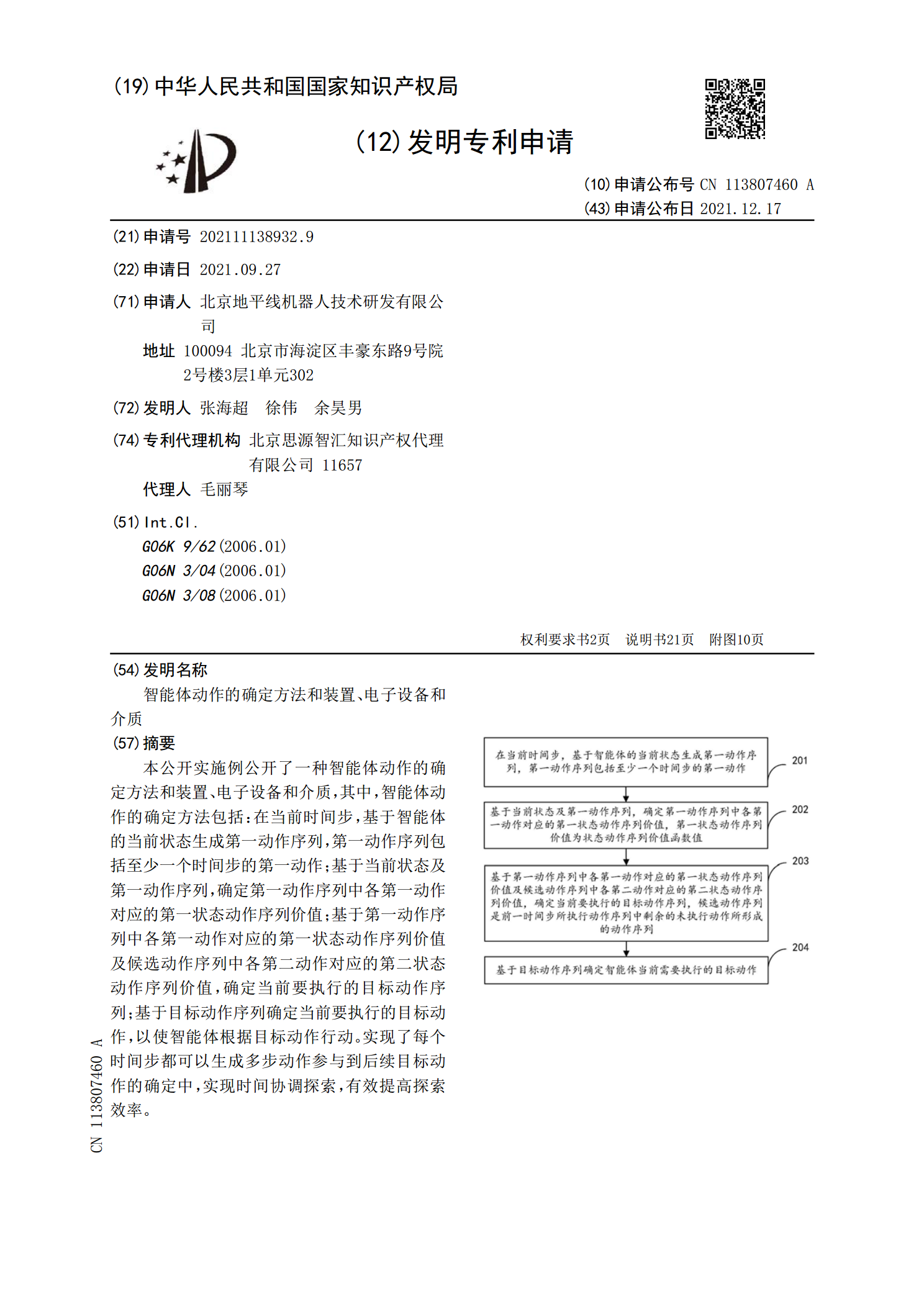
本公开实施例公开了一种智能体动作的确定方法和装置、电子设备和介质,其中,智能体动作的确定方法包括:在当前时间步,基于智能体的当前状态生成第一动作序列,第一动作序列包括至少一个时间步的第一动作;基于当前状态及第一动作序列,确定第一动作序列中各第一动作对应的第一状态动作序列价值;基于第一动作序列中各第一动作对应的第一状态动作序列价值及候选动作序列中各第二动作对应的第二状态动作序列价值,确定当前要执行的目标动作序列;基于目标动作序列确定当前要执行的目标动作,以使智能体根据目标动作行动。实现了每个时间步都可以生成

运动智能体轨迹规划方法、装置、存储介质和电子设备.pdf
本发明提供了一种运动智能体轨迹规划方法、装置、存储介质和电子设备,涉及轨迹规划技术领域。每次取开放队列中期望最小的节点作为当前节点,判断是否满足到达目标;若不满足,对当前节点的空间状态向多个运动方向进行拓展;再计算当前节点的停留允许时间段;进而计算期望到达时间段;以此构建新节点存入开放队列,重复执行,直至到达目标,则根据父节点从最终节点向前回溯找到起始节点,将回溯序列反转,提取对应的空间状态与时刻信息,输出最终轨迹。将时间维度考虑到规划过程中,将静态环境中的规划提升到动态环境中的规划。极大的降低了搜索空间

叶脉确定方法、装置、电子设备和存储介质.pdf
本公开涉及一种叶脉确定方法、装置、电子设备和存储介质,该方法包括:通过根据获取的构成树叶模型的多个三角面的顶点坐标,确定三角面中的独有边,得到树叶模型的多条边缘边,并根据多条边缘边确定边缘顶点序列,再根据边缘顶点序列确定叶脉特征点,最后将叶脉特征点到叶柄点之间的最短路径确定为树叶模型的叶脉,从而能够基于树叶模型的多个三角面的顶点坐标确定呈放射状的树叶所对应的树叶模型中的叶脉。
类别确定方法、装置、电子设备和存储介质.pdf
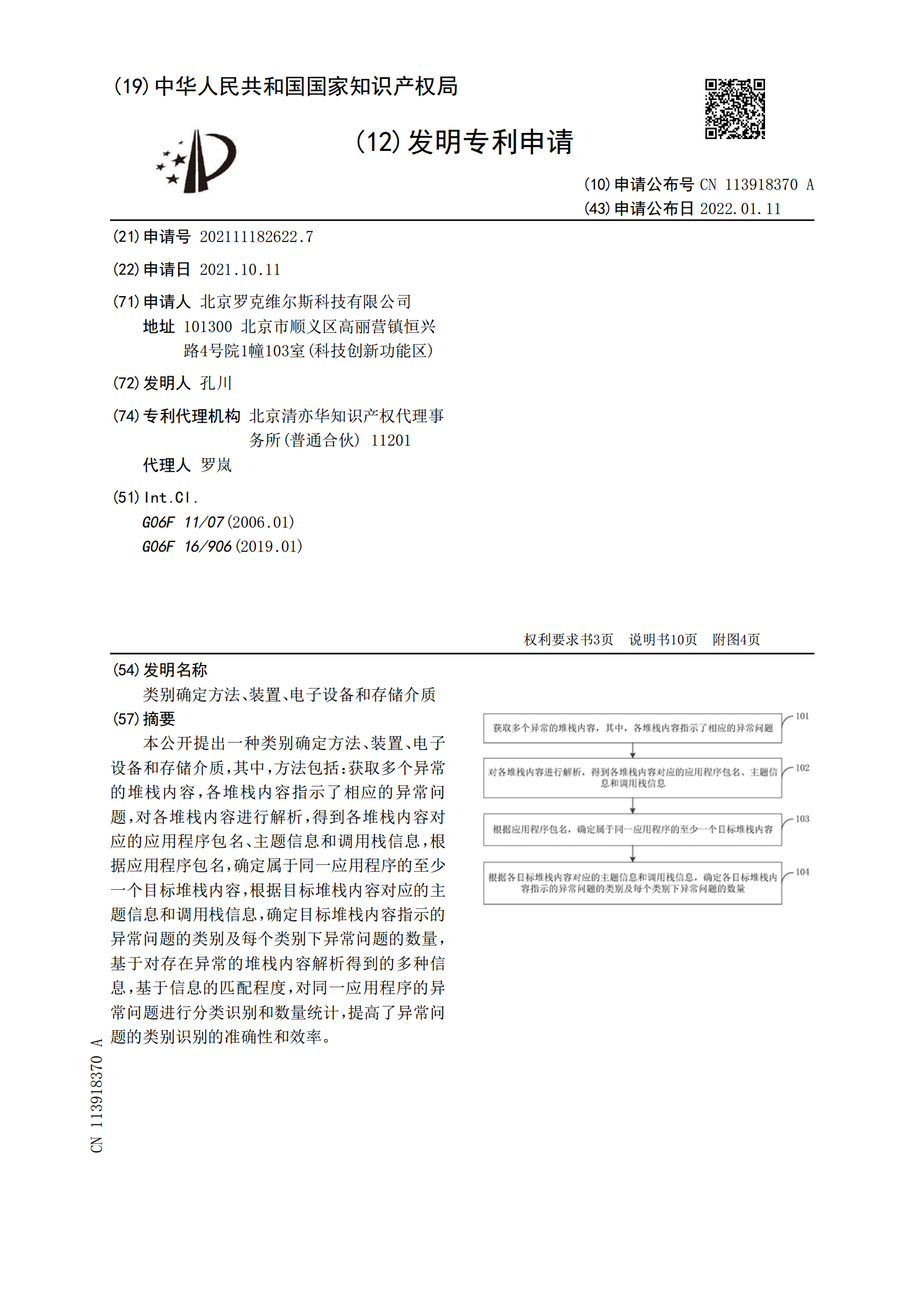
本公开提出一种类别确定方法、装置、电子设备和存储介质,其中,方法包括:获取多个异常的堆栈内容,各堆栈内容指示了相应的异常问题,对各堆栈内容进行解析,得到各堆栈内容对应的应用程序包名、主题信息和调用栈信息,根据应用程序包名,确定属于同一应用程序的至少一个目标堆栈内容,根据目标堆栈内容对应的主题信息和调用栈信息,确定目标堆栈内容指示的异常问题的类别及每个类别下异常问题的数量,基于对存在异常的堆栈内容解析得到的多种信息,基于信息的匹配程度,对同一应用程序的异常问题进行分类识别和数量统计,提高了异常问题的类别识别
动作捕捉方法、装置、电子设备和存储介质.pdf
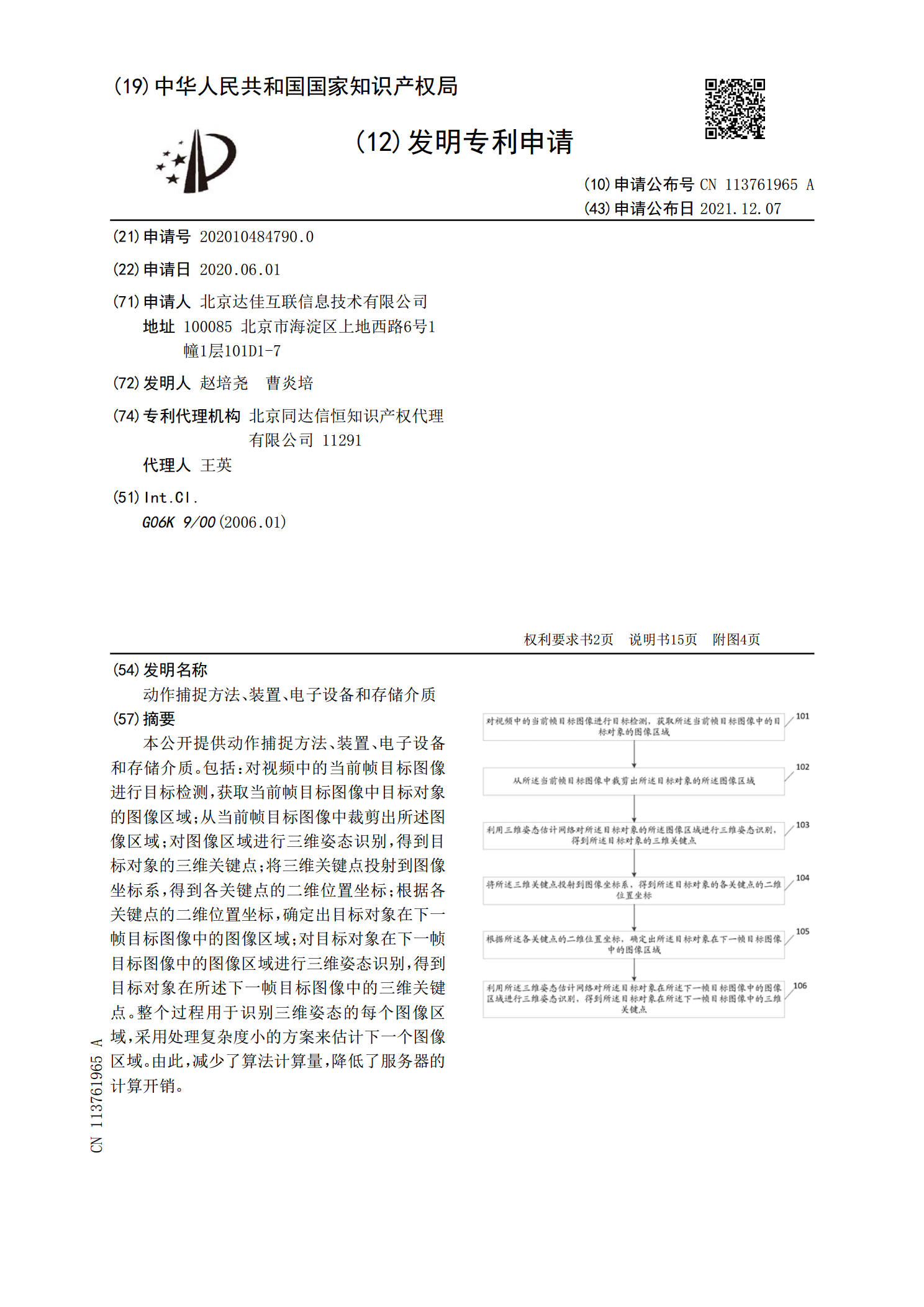
本公开提供动作捕捉方法、装置、电子设备和存储介质。包括:对视频中的当前帧目标图像进行目标检测,获取当前帧目标图像中目标对象的图像区域;从当前帧目标图像中裁剪出所述图像区域;对图像区域进行三维姿态识别,得到目标对象的三维关键点;将三维关键点投射到图像坐标系,得到各关键点的二维位置坐标;根据各关键点的二维位置坐标,确定出目标对象在下一帧目标图像中的图像区域;对目标对象在下一帧目标图像中的图像区域进行三维姿态识别,得到目标对象在所述下一帧目标图像中的三维关键点。整个过程用于识别三维姿态的每个图像区域,采用处理复