
决策模型训练方法、装置、终端设备及存储介质.pdf

是你****盟主

1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

决策模型训练方法、装置、终端设备及存储介质.pdf
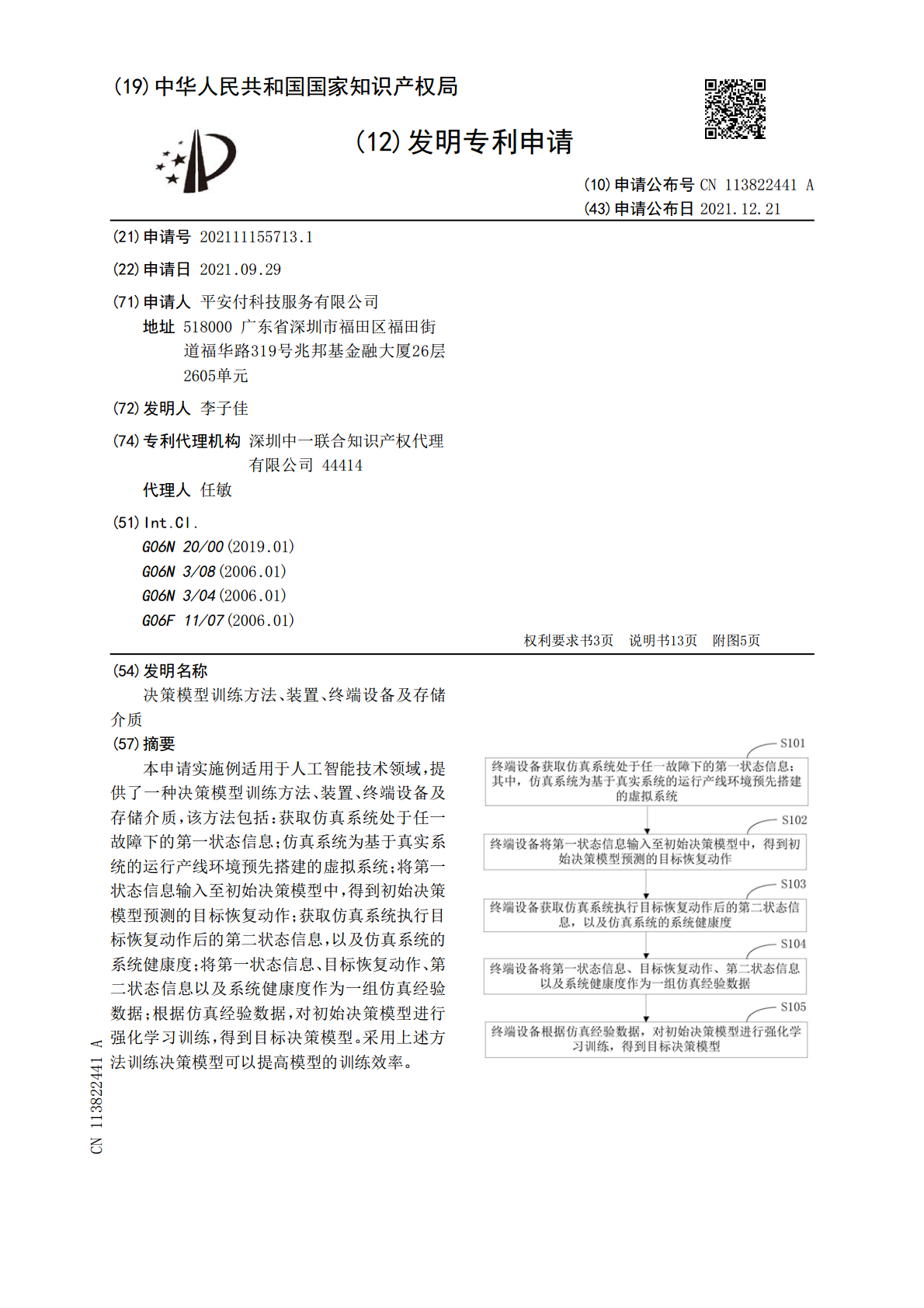
本申请实施例适用于人工智能技术领域,提供了一种决策模型训练方法、装置、终端设备及存储介质,该方法包括:获取仿真系统处于任一故障下的第一状态信息;仿真系统为基于真实系统的运行产线环境预先搭建的虚拟系统;将第一状态信息输入至初始决策模型中,得到初始决策模型预测的目标恢复动作;获取仿真系统执行目标恢复动作后的第二状态信息,以及仿真系统的系统健康度;将第一状态信息、目标恢复动作、第二状态信息以及系统健康度作为一组仿真经验数据;根据仿真经验数据,对初始决策模型进行强化学习训练,得到目标决策模型。采用上述方法训练决策
模型训练方法、装置与存储介质.pdf
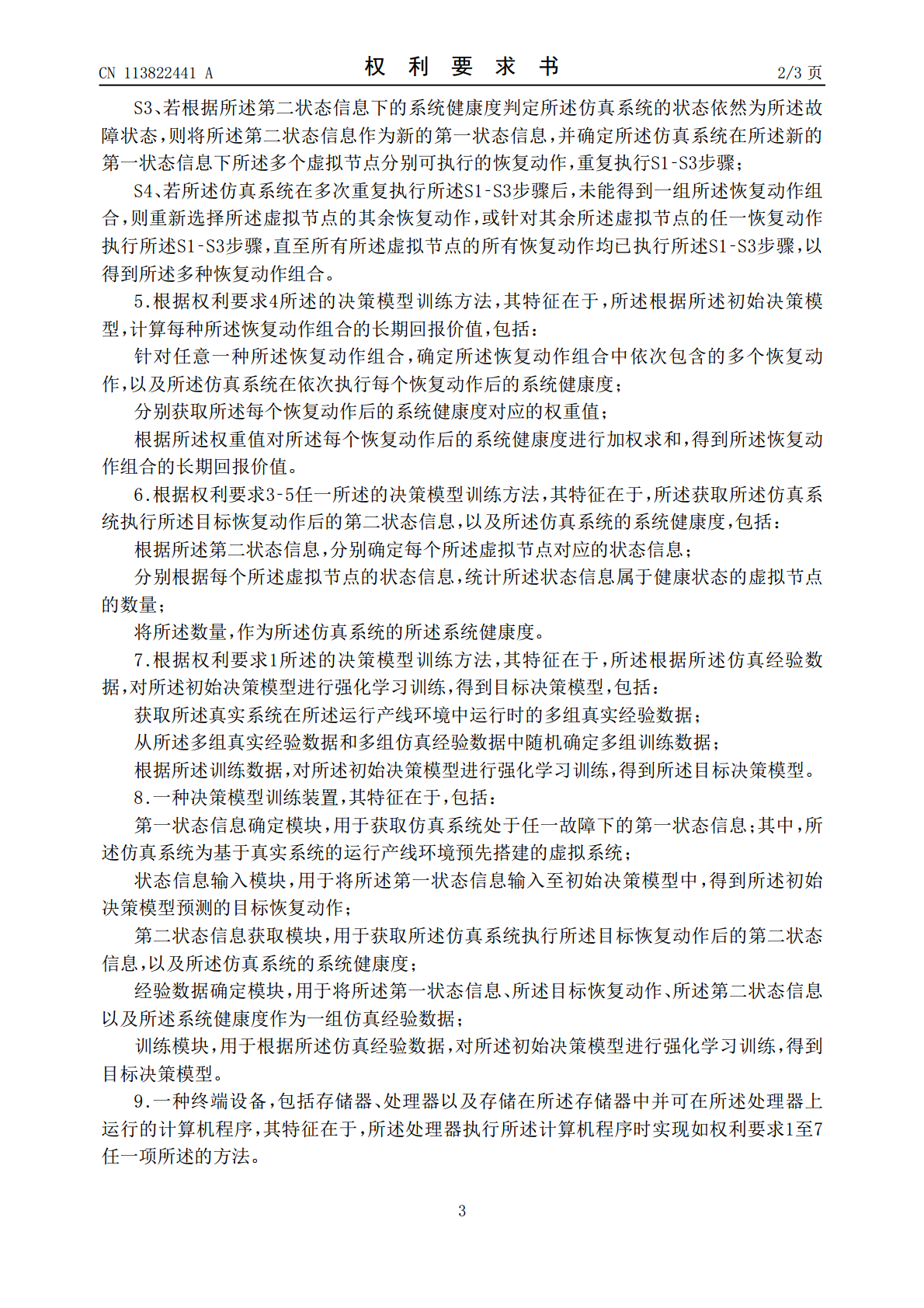
本申请涉及人工智能技术领域,本申请提供一种模型训练方法、装置与存储介质,模型训练方法包括:获取待训练路由模型;获取多条样本交易数据和多个属性数据;获取至少两个目标条件;将多条样本交易数据和多个属性数据输入待训练路由模型,获得至少两个目标统计结果;确定至少两个目标统计结果中满足对应的目标条件的统计结果的数量,若数量满足模型输出条件,将待训练路由模型确定为备选路由模型;若数量不满足模型输出条件,调整待训练路由模型的参数,并将参数调整后的路由模型确定为待训练路由模型,直到至少两个统计结果均满足对应的目标条件,输

模型训练方法、装置、设备及存储介质.pdf
本申请实施例提供一种模型训练方法、装置、设备及存储介质,通过获取样本数据集;基于所述样本数据集对模型进行多轮训练,在训练过程中,采用前一轮训练中得到的困难样本进行下一轮的训练,直至所述模型基于所述样本数据集中的所有样本均能输出正确结果为止,得到目标模型,其中,所述困难样本是指在训练过程中预先标定结果与模型输出结果不一致的样本。本申请实施例能够提升模型训练的效率和模型的准确性。
模型训练方法、装置、设备及存储介质.pdf
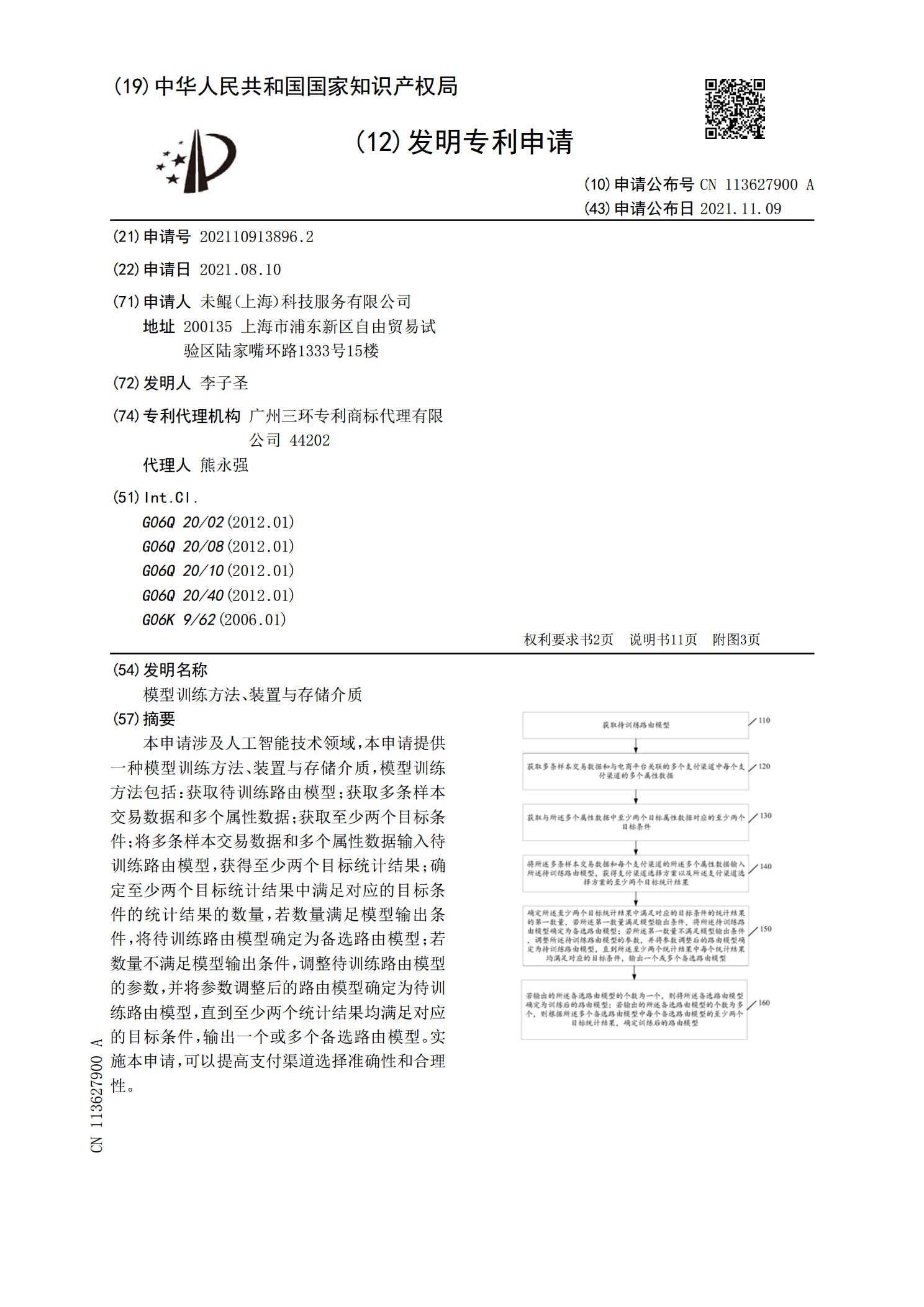
本公开实施例公开了一种模型训练方法、装置、设备及存储介质,其中,所述方法包括:损失函数缩放器创建接口基于缩放器构造参数,创建损失函数缩放器;在对深度学习模型进行的每一轮次混合精度训练的前向传播过程中,损失函数缩放器缩放接口基于所述损失函数缩放器,对所述深度学习模型在当前轮次混合精度训练中输出的损失值进行放大处理,得到放大后的所述损失值;在每一所述轮次混合精度训练的反向传播过程中,损失函数优化器迭代接口利用设定的优化器和所述损失函数缩放器,基于放大后的所述损失值,对所述深度学习模型中的网络参数进行更新,得到

模型训练方法、装置、设备、存储介质.pdf
本公开实施例公开了一种模型训练方法、装置、设备、存储介质,其中,所述方法包括:优化器构造接口基于优化器构造参数,构建优化器;响应于基于深度学习模型的反向传播梯度计算完成,可学习参数更新接口基于所述优化器和所述深度学习模型中可学习参数和所述可学习参数对应的梯度信息,确定更新后的可学习参数;所述可学习参数更新接口基于更新后的可学习参数,得到参数更新后的深度学习模型。