
一种可变径管道清污机器人.pdf

书錦****by

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可变径管道清污机器人.pdf
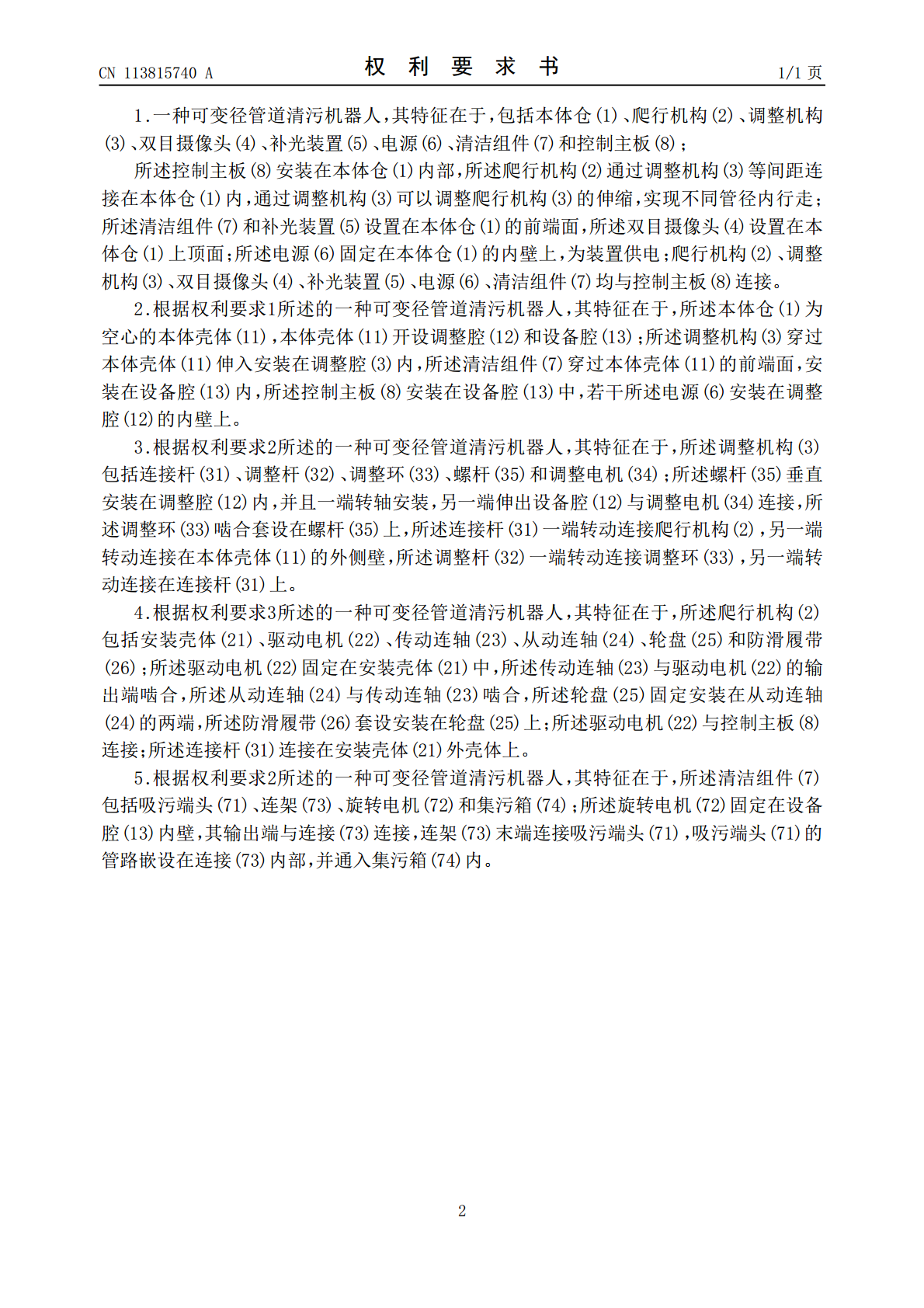
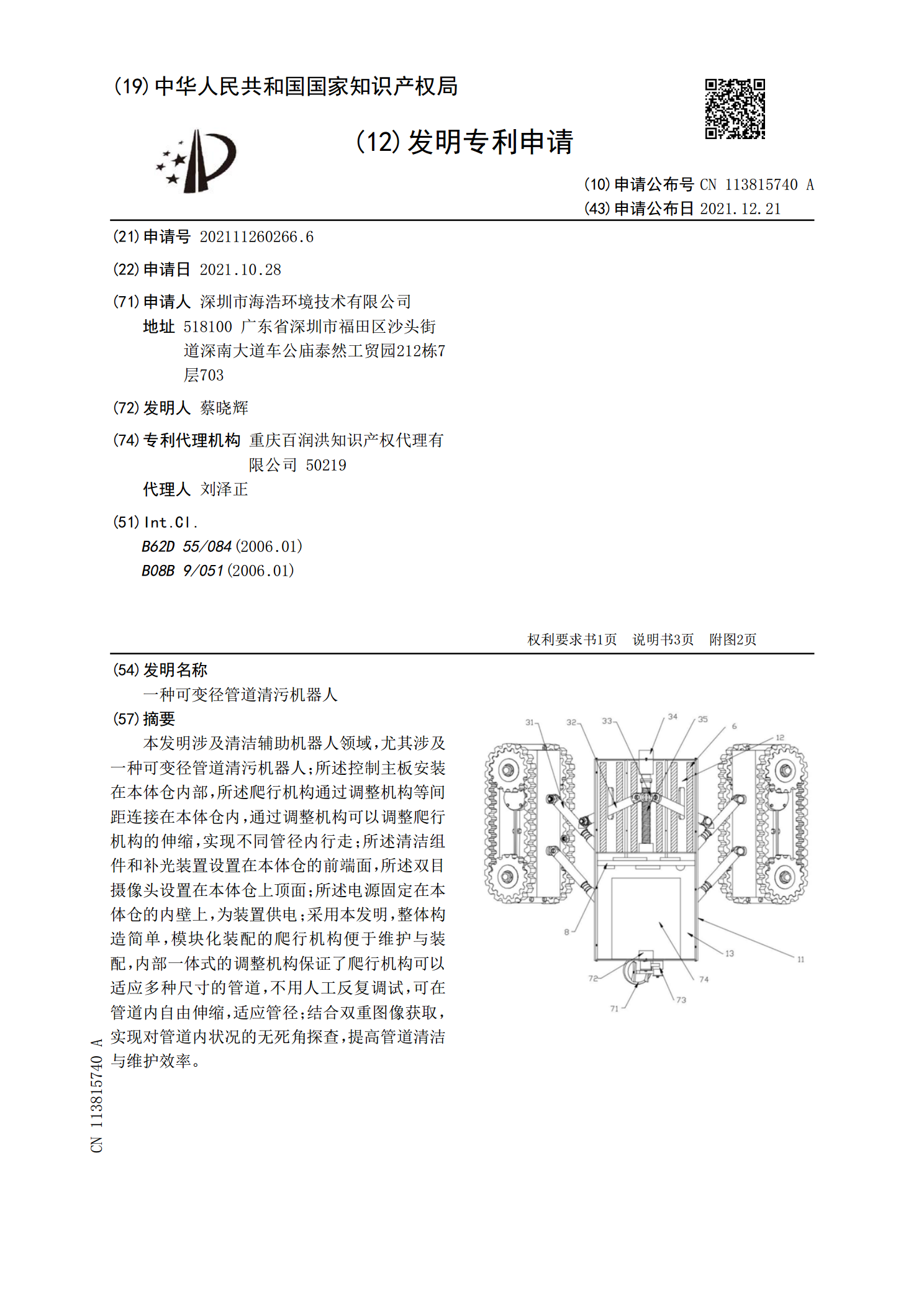
本发明涉及清洁辅助机器人领域,尤其涉及一种可变径管道清污机器人;所述控制主板安装在本体仓内部,所述爬行机构通过调整机构等间距连接在本体仓内,通过调整机构可以调整爬行机构的伸缩,实现不同管径内行走;所述清洁组件和补光装置设置在本体仓的前端面,所述双目摄像头设置在本体仓上顶面;所述电源固定在本体仓的内壁上,为装置供电;采用本发明,整体构造简单,模块化装配的爬行机构便于维护与装配,内部一体式的调整机构保证了爬行机构可以适应多种尺寸的管道,不用人工反复调试,可在管道内自由伸缩,适应管径;结合双重图像获取,实现对管
一种可变径的管道机器人.pdf
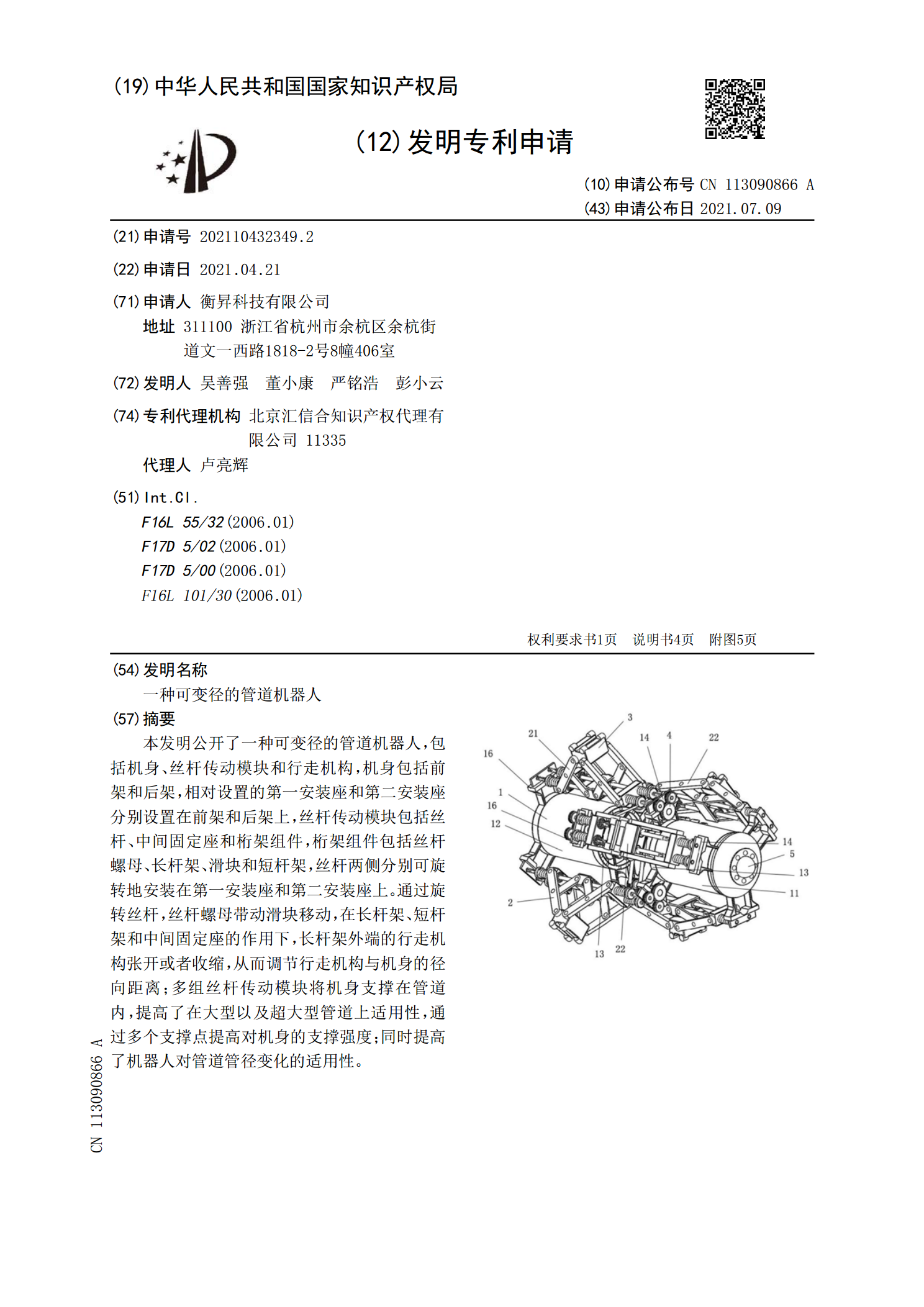
本发明公开了一种可变径的管道机器人,包括机身、丝杆传动模块和行走机构,机身包括前架和后架,相对设置的第一安装座和第二安装座分别设置在前架和后架上,丝杆传动模块包括丝杆、中间固定座和桁架组件,桁架组件包括丝杆螺母、长杆架、滑块和短杆架,丝杆两侧分别可旋转地安装在第一安装座和第二安装座上。通过旋转丝杆,丝杆螺母带动滑块移动,在长杆架、短杆架和中间固定座的作用下,长杆架外端的行走机构张开或者收缩,从而调节行走机构与机身的径向距离;多组丝杆传动模块将机身支撑在管道内,提高了在大型以及超大型管道上适用性,通过多个支
一种可变径管道机器人.pdf
本发明公开了一种可变径管道机器人,包括机身主体,机身主体通过支撑机构与移动机构连接,支撑机构的底部与主动调径机构铰接连接,主动调径机构通过丝杆和光杆安装于机身主体上,支撑机构的顶部与移动机构铰接连接,主动调径机构通过调径伺服电机调整支撑机构的角度,进而实现移动机构的伸展收缩调整,机身主体上设置有用于驱动移动机构行走的驱动机构。本发明通过小孔径检测孔进入不同管径的管道内进行作业,适用范围广泛;采用异形齿轮的传动机构,使得管道机器人机体结构紧凑;通过主动调径机构保证移动机构履带与作业管道的支撑力,能够完成管道
一种自适应管径的管道清污机器人.pdf
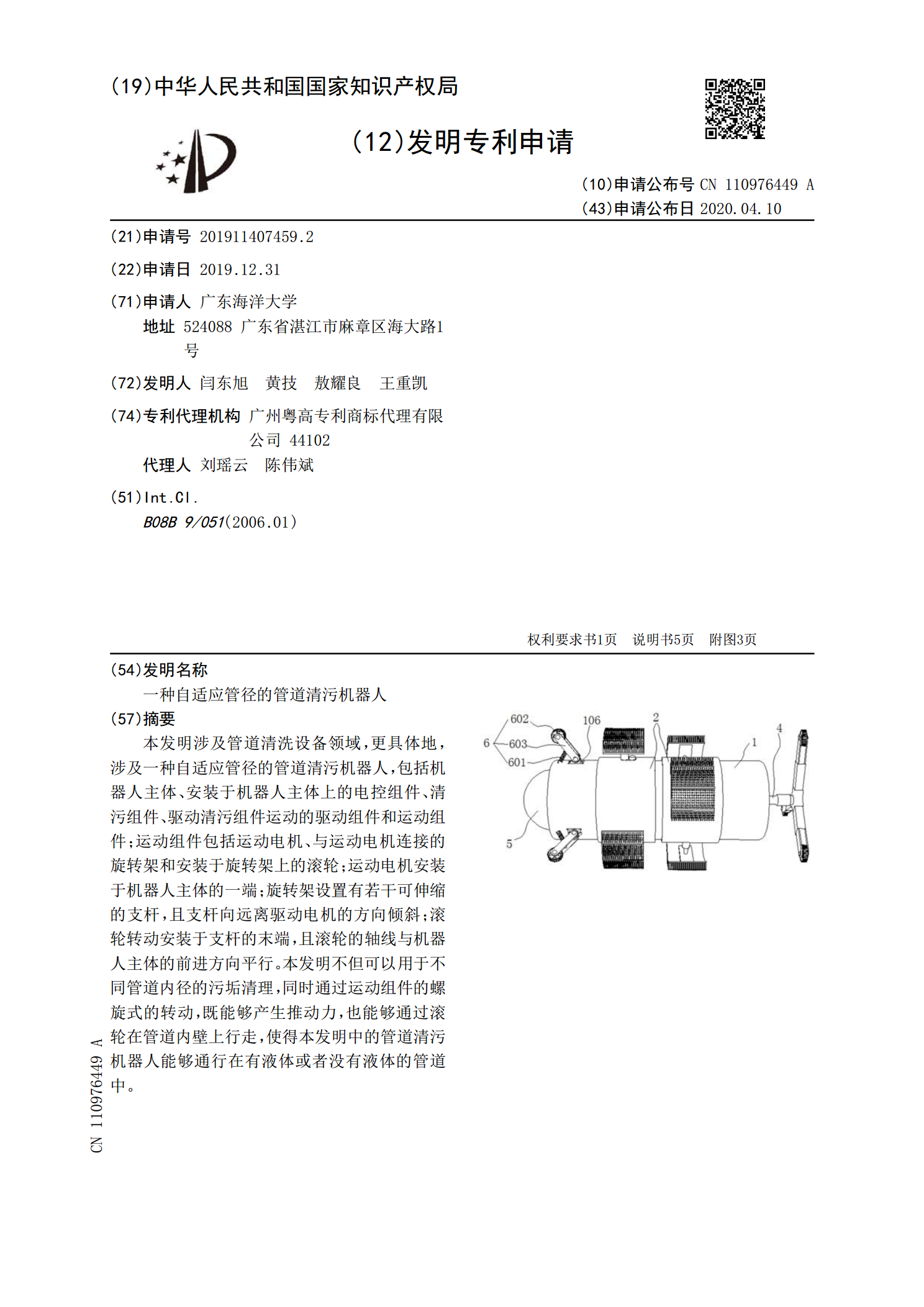
本发明涉及管道清洗设备领域,更具体地,涉及一种自适应管径的管道清污机器人,包括机器人主体、安装于机器人主体上的电控组件、清污组件、驱动清污组件运动的驱动组件和运动组件;运动组件包括运动电机、与运动电机连接的旋转架和安装于旋转架上的滚轮;运动电机安装于机器人主体的一端;旋转架设置有若干可伸缩的支杆,且支杆向远离驱动电机的方向倾斜;滚轮转动安装于支杆的末端,且滚轮的轴线与机器人主体的前进方向平行。本发明不但可以用于不同管道内径的污垢清理,同时通过运动组件的螺旋式的转动,既能够产生推动力,也能够通过滚轮在管道内
一种可变径管道检测机器人.pdf
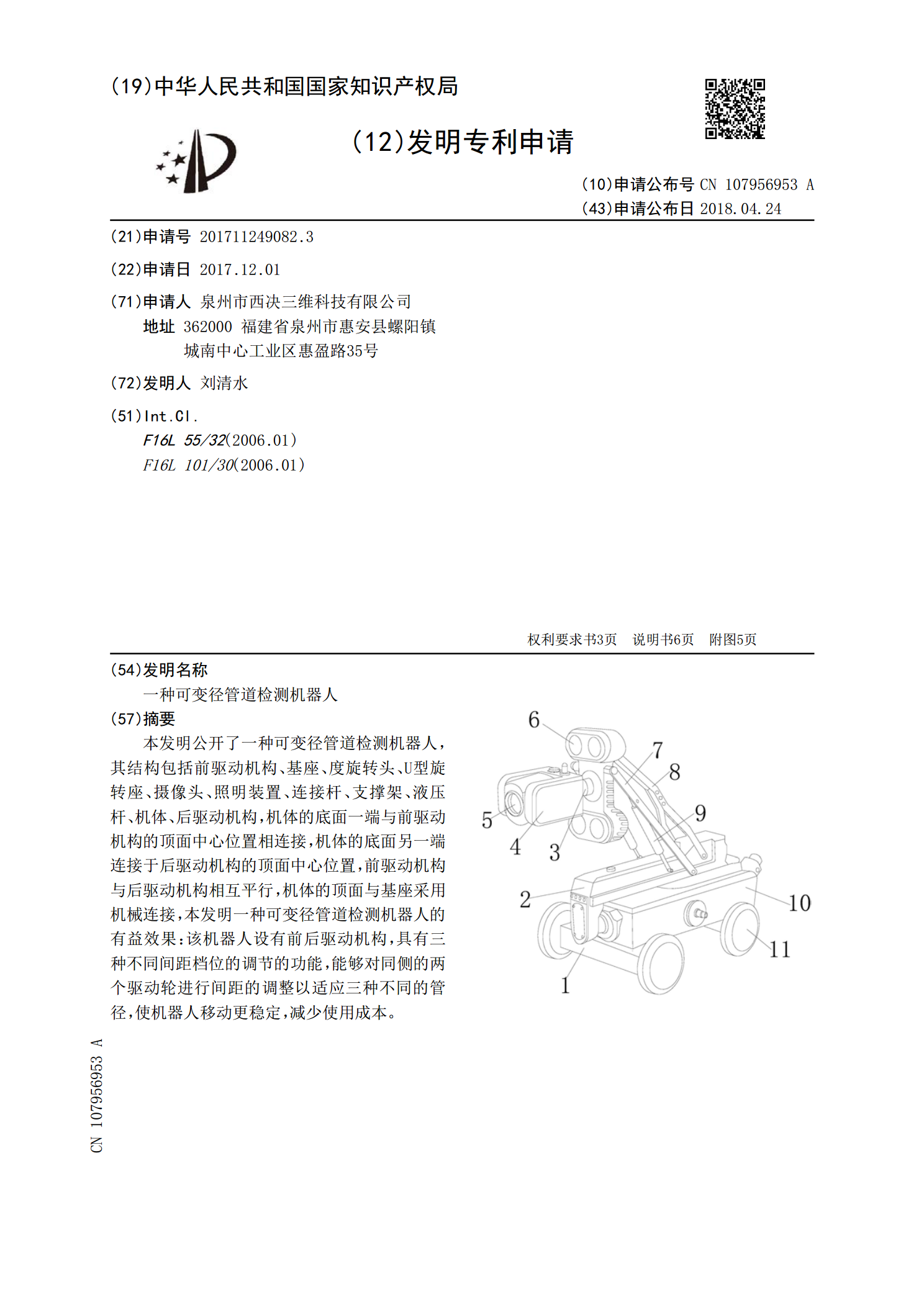
本发明公开了一种可变径管道检测机器人,其结构包括前驱动机构、基座、度旋转头、U型旋转座、摄像头、照明装置、连接杆、支撑架、液压杆、机体、后驱动机构,机体的底面一端与前驱动机构的顶面中心位置相连接,机体的底面另一端连接于后驱动机构的顶面中心位置,前驱动机构与后驱动机构相互平行,机体的顶面与基座采用机械连接,本发明一种可变径管道检测机器人的有益效果:该机器人设有前后驱动机构,具有三种不同间距档位的调节的功能,能够对同侧的两个驱动轮进行间距的调整以适应三种不同的管径,使机器人移动更稳定,减少使用成本。