
步态数据的获取方法、助行设备和计算机可读存储介质.pdf

An****99


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

步态数据的获取方法、助行设备和计算机可读存储介质.pdf
本发明提供一种步态数据的获取方法、助行设备和计算机可读存储介质,属于助行器技术领域,该方法包括:获取所述激光雷达扫描用户腿部得到的各个目标点以及所述目标点对应的扫描数据;根据所述扫描数据以及各个所述目标点确定两个目标点云块,其中,每个目标点云块对应所述用户的一个腿部;实时监测两个所述目标点云块的落脚位置以及速度参数,并根据所述落脚位置以及所述速度参数获取所述用户的步态数据。本发明中,助行设备通过价格较为低廉的激光雷达即可获取用户的步态数据,从而实现低成本的获取用户的步态数据。

语音数据的获取方法、装置、设备及计算机可读存储介质.pdf
本申请公开了一种语音数据的获取方法、装置、设备及计算机可读存储介质,属于计算机技术领域。方法包括:获取多媒体资源和样本语音数据;基于所述样本语音数据,获取一阶特征向量和二阶特征向量,所述一阶特征向量用于表征所述样本语音数据的音色的平均特征,所述二阶特征向量用于表征所述样本语音数据的音色的标准差特征;基于所述一阶特征向量和所述二阶特征向量对所述多媒体资源进行处理,得到与所述样本语音数据的音色匹配的目标语音数据。该方法得到的目标语音数据的音色与样本语音数据的音色的匹配度较高,使得目标语音数据的音色保真度较高。

监控数据获取方法、装置、设备及计算机可读存储介质.pdf
本发明公开了一种监控数据获取方法,包括:管理节点利用目标节点的节点标识,从连接池中申请对应的长连接;其中,所述连接池中包括管理节点与普通节点之间的长连接,且所述目标节点为普通节点;通过所述长连接从所述目标节点获取监控数据。可见,在本方案中,管理节点与其它普通节点之间获取监控数据时,采用长连接的形式,避免了频繁开启或者关闭会话所带来的额外损坏,以及因会话关闭不及时或关闭出现错误导致的大量的会话残留,致使其它连接无法正常进行的问题;本发明还公开了一种监控数据获取装置、设备及计算机可读存储介质,同样能实现上述技
数据获取方法、系统、电子设备及计算机可读存储介质.pdf
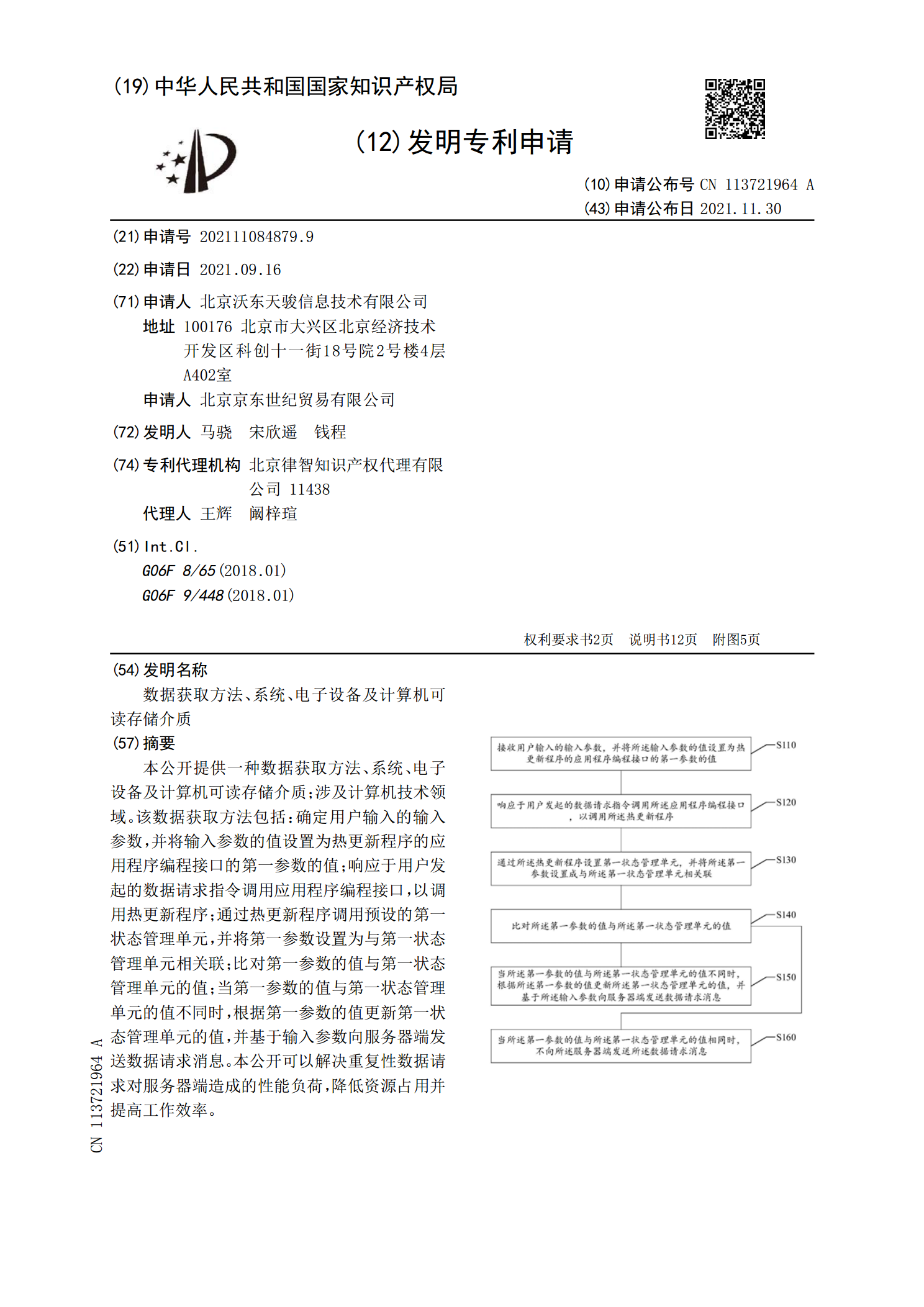
本公开提供一种数据获取方法、系统、电子设备及计算机可读存储介质;涉及计算机技术领域。该数据获取方法包括:确定用户输入的输入参数,并将输入参数的值设置为热更新程序的应用程序编程接口的第一参数的值;响应于用户发起的数据请求指令调用应用程序编程接口,以调用热更新程序;通过热更新程序调用预设的第一状态管理单元,并将第一参数设置为与第一状态管理单元相关联;比对第一参数的值与第一状态管理单元的值;当第一参数的值与第一状态管理单元的值不同时,根据第一参数的值更新第一状态管理单元的值,并基于输入参数向服务器端发送数据请求

获取动态数据的方法及装置、计算机可读存储介质.pdf
本发明实施例公开了一种获取动态数据的方法及装置、存储介质,遍历页面的组件配置的所有由父级传给子级的数据的类型值;根据类型值,确定出多个动态数据源中存在动态参数配置的目标动态数据源,对目标动态数据源的数据进行收集;利用收集的目标动态数据源的数据,实现页面的动态数据的更新。采用上述方案,提升了动态数据源配置的灵活性,且减少了同一数据源的调用次数。