
仿真雷达的评测方法、装置、设备及计算机程序产品.pdf

一条****淑淑


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共37页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

仿真雷达的评测方法、装置、设备及计算机程序产品.pdf
本申请实施例公开一种仿真雷达的评测方法、装置、设备及计算机程序产品,可应用于自动驾驶领域;方法包括:获取由被仿真的物理雷达对目标物理评测场景中的物理被测对象进行扫描,所得到的物理点云数据帧;获取由仿真雷达对目标仿真评测场景中的仿真被测对象进行扫描,所得到的仿真点云数据帧;确定对仿真雷达进行真实性评测时所需的评测指标,并按照评测指标的计算需求,分别对物理点云数据帧和仿真点云数据帧进行数据分析,得到数据分析结果;基于数据分析结果确定评测指标的指标值,并根据评测指标的指标值评测仿真雷达的真实性。本申请实施例可以
雷达测试方法、装置、电子设备、介质及计算机程序产品.pdf
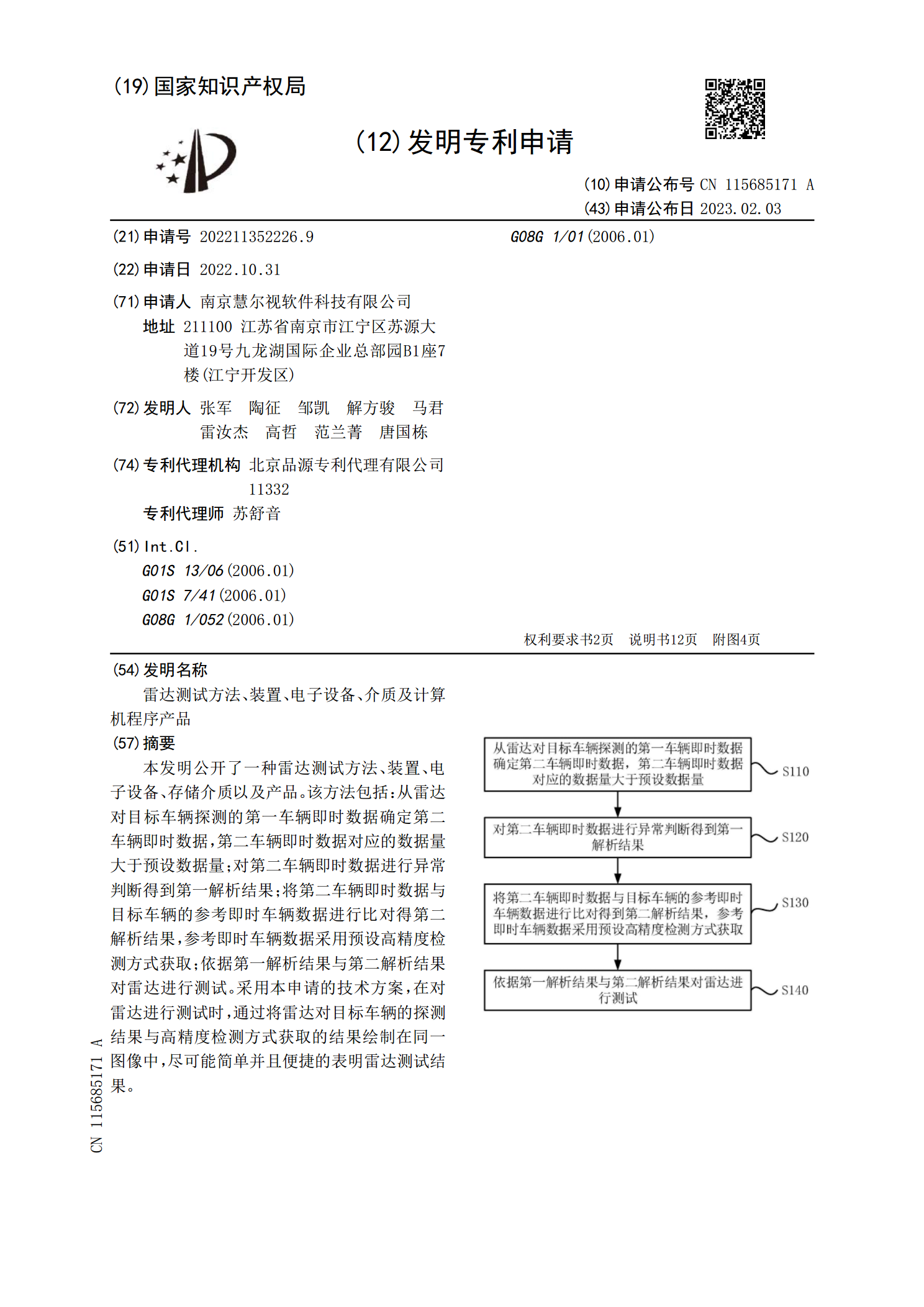
本发明公开了一种雷达测试方法、装置、电子设备、存储介质以及产品。该方法包括:从雷达对目标车辆探测的第一车辆即时数据确定第二车辆即时数据,第二车辆即时数据对应的数据量大于预设数据量;对第二车辆即时数据进行异常判断得到第一解析结果;将第二车辆即时数据与目标车辆的参考即时车辆数据进行比对得第二解析结果,参考即时车辆数据采用预设高精度检测方式获取;依据第一解析结果与第二解析结果对雷达进行测试。采用本申请的技术方案,在对雷达进行测试时,通过将雷达对目标车辆的探测结果与高精度检测方式获取的结果绘制在同一图像中,尽可能

方法、计算机程序产品、装置和调频连续波雷达系统.pdf
本发明公开一种用于产生干扰被减少的雷达图像的方法、计算机程序产品、装置和调频连续波雷达系统,该方法包括:接收测量的差拍信号的序列;识别测量的差拍信号的序列内的一个或多个干扰片段,该干扰片段是受到干扰的片段;通过创建矩阵Y形式的测量的差拍信号的序列的修正的表示来对测量的差拍信号的序列进行修正:创建表示测量的差拍信号的序列的修正的修正掩模,该修正掩模是矩阵M;和根据Y和M估计重构的距离多普勒图像

导航方法、装置、设备及计算机程序产品.pdf
本公开实施例提供了导航方法、装置、设备及计算机程序产品。其中,所述方法包括:基于路网数据,判断导航规划路线是否包含车道标线为长实线的车道,如果包含,则判断被导航对象沿所述导航规划路线包含的车道行驶的过程中是否要通过变换行驶车道的方式进入所述车道标线为长实线的车道;如果是,则在地图导航界面中渲染与长实线相关的导航提示信息,以提示被导航对象注意前方将进入车道标线为长实线的车道。因此,本公开实施例在被导航对象进入车道标线为长实线的车道之前,通过在地图导航界面中渲染与长实线相关的导航提示信息,提示被导航对象前方将

雷达探测性能评测方法、装置、计算设备及存储介质.pdf
本发明提供了一种雷达探测性能评测方法、装置、计算设备及存储介质,其中方法包括:确定雷达的标称探测距离以及所需评测的若干个评测项目;确定对每一个评测项目进行评测所需测试目标的数量;根据所述标称探测距离,控制对应数量的测试目标按照对应评测项目的设定方式进行航行,基于航行过程中所述雷达对所述测试目标的探测数据以及所述测试目标的实际航行数据,确定每一个评测项目的评测结果。本方案,能够全面有效地评测雷达的探测性能。