
举升装置故障检测系统、故障检测方法、装置及存储介质.pdf

是笛****加盟

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
举升装置故障检测系统、故障检测方法、装置及存储介质.pdf
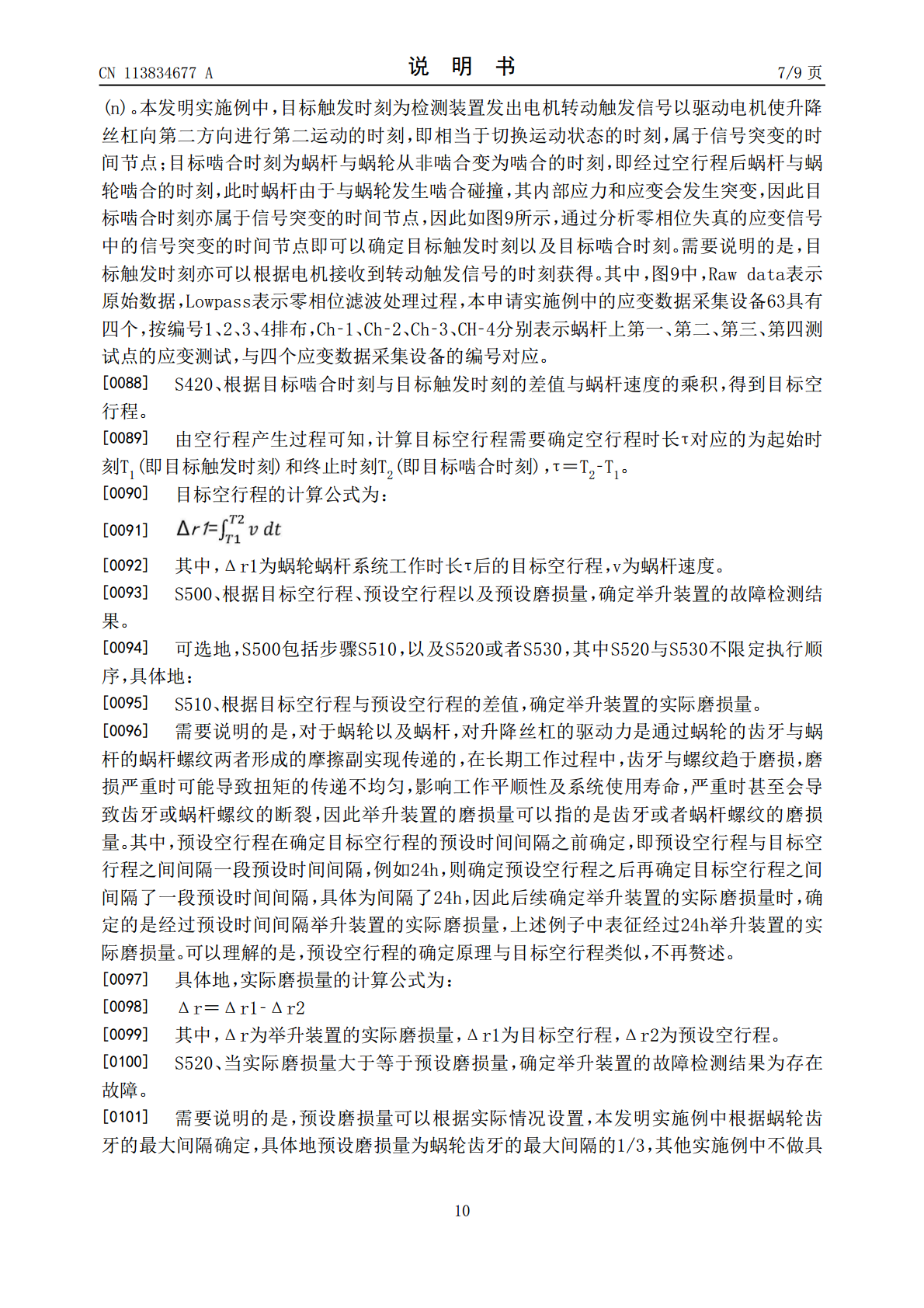
本发明公开了一种举升装置故障检测系统、故障检测方法、装置及存储介质,本发明通过驱动电机控制蜗杆转动,以带动蜗轮转动使升降丝杠向第一方向进行第一运动,在停止第一方向的运动后驱动电机使升降丝杠向第二方向进行第二运动;在第一运动以及第二运动的过程中采集蜗杆的应变信号以及蜗轮的加速度信号;根据应变信号以及加速度信号,确定蜗杆速度;根据应变信号以及蜗杆速度确定目标空行程;根据目标空行程、预设空行程以及预设磨损量,确定举升装置的故障检测结果,不需要人工进行检测,提高了检测效率以及准确性,当举升装置出现故障时能够及时发
故障检测方法、装置和可读存储介质.pdf
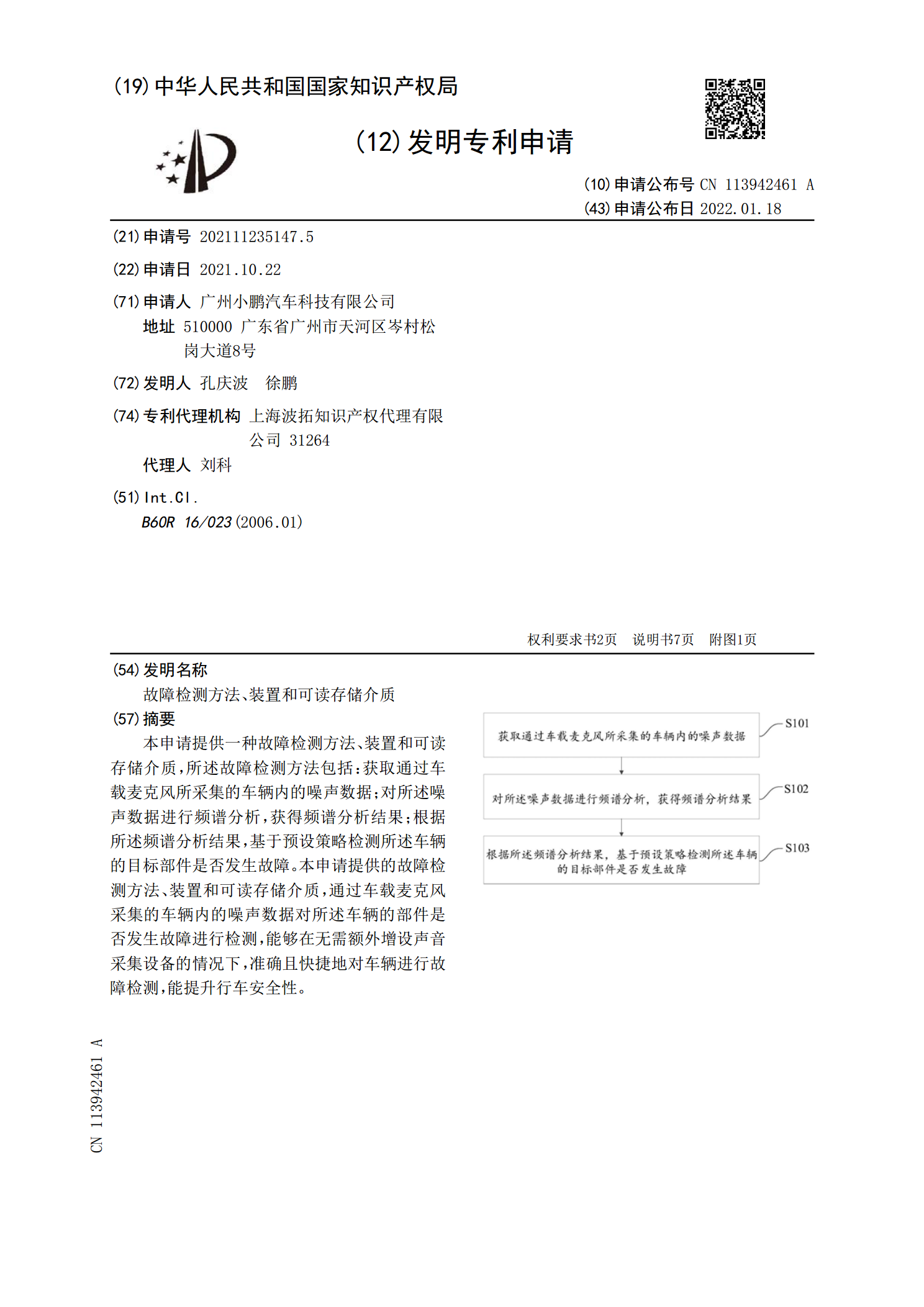
本申请提供一种故障检测方法、装置和可读存储介质,所述故障检测方法包括:获取通过车载麦克风所采集的车辆内的噪声数据;对所述噪声数据进行频谱分析,获得频谱分析结果;根据所述频谱分析结果,基于预设策略检测所述车辆的目标部件是否发生故障。本申请提供的故障检测方法、装置和可读存储介质,通过车载麦克风采集的车辆内的噪声数据对所述车辆的部件是否发生故障进行检测,能够在无需额外增设声音采集设备的情况下,准确且快捷地对车辆进行故障检测,能提升行车安全性。
从泵故障检测方法、装置、设备及可读存储介质.pdf
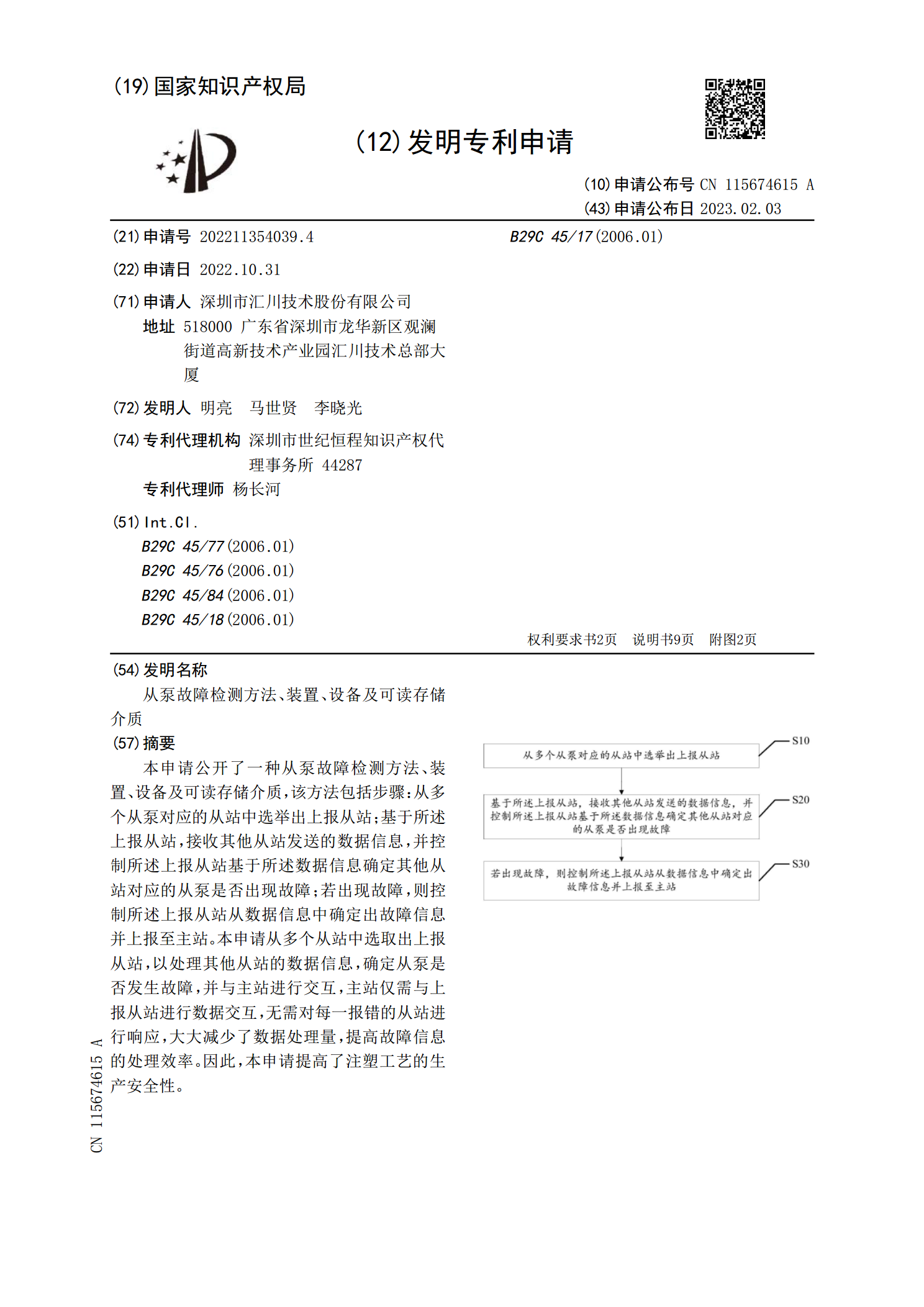
本申请公开了一种从泵故障检测方法、装置、设备及可读存储介质,该方法包括步骤:从多个从泵对应的从站中选举出上报从站;基于所述上报从站,接收其他从站发送的数据信息,并控制所述上报从站基于所述数据信息确定其他从站对应的从泵是否出现故障;若出现故障,则控制所述上报从站从数据信息中确定出故障信息并上报至主站。本申请从多个从站中选取出上报从站,以处理其他从站的数据信息,确定从泵是否发生故障,并与主站进行交互,主站仅需与上报从站进行数据交互,无需对每一报错的从站进行响应,大大减少了数据处理量,提高故障信息的处理效率。因
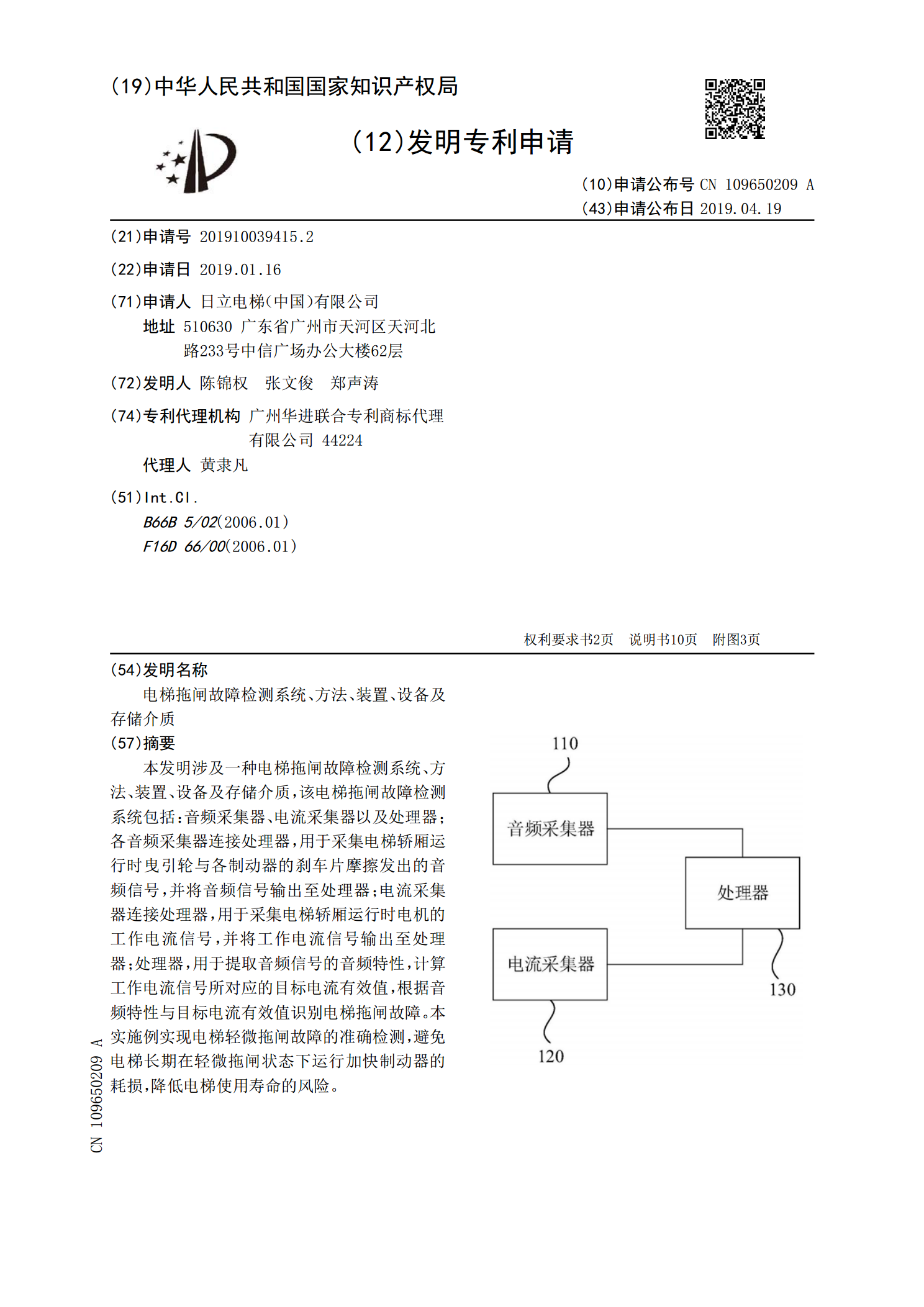
电梯拖闸故障检测系统、方法、装置、设备及存储介质.pdf
本发明涉及一种电梯拖闸故障检测系统、方法、装置、设备及存储介质,该电梯拖闸故障检测系统包括:音频采集器、电流采集器以及处理器;各音频采集器连接处理器,用于采集电梯轿厢运行时曳引轮与各制动器的刹车片摩擦发出的音频信号,并将音频信号输出至处理器;电流采集器连接处理器,用于采集电梯轿厢运行时电机的工作电流信号,并将工作电流信号输出至处理器;处理器,用于提取音频信号的音频特性,计算工作电流信号所对应的目标电流有效值,根据音频特性与目标电流有效值识别电梯拖闸故障。本实施例实现电梯轻微拖闸故障的准确检测,避免电梯长期
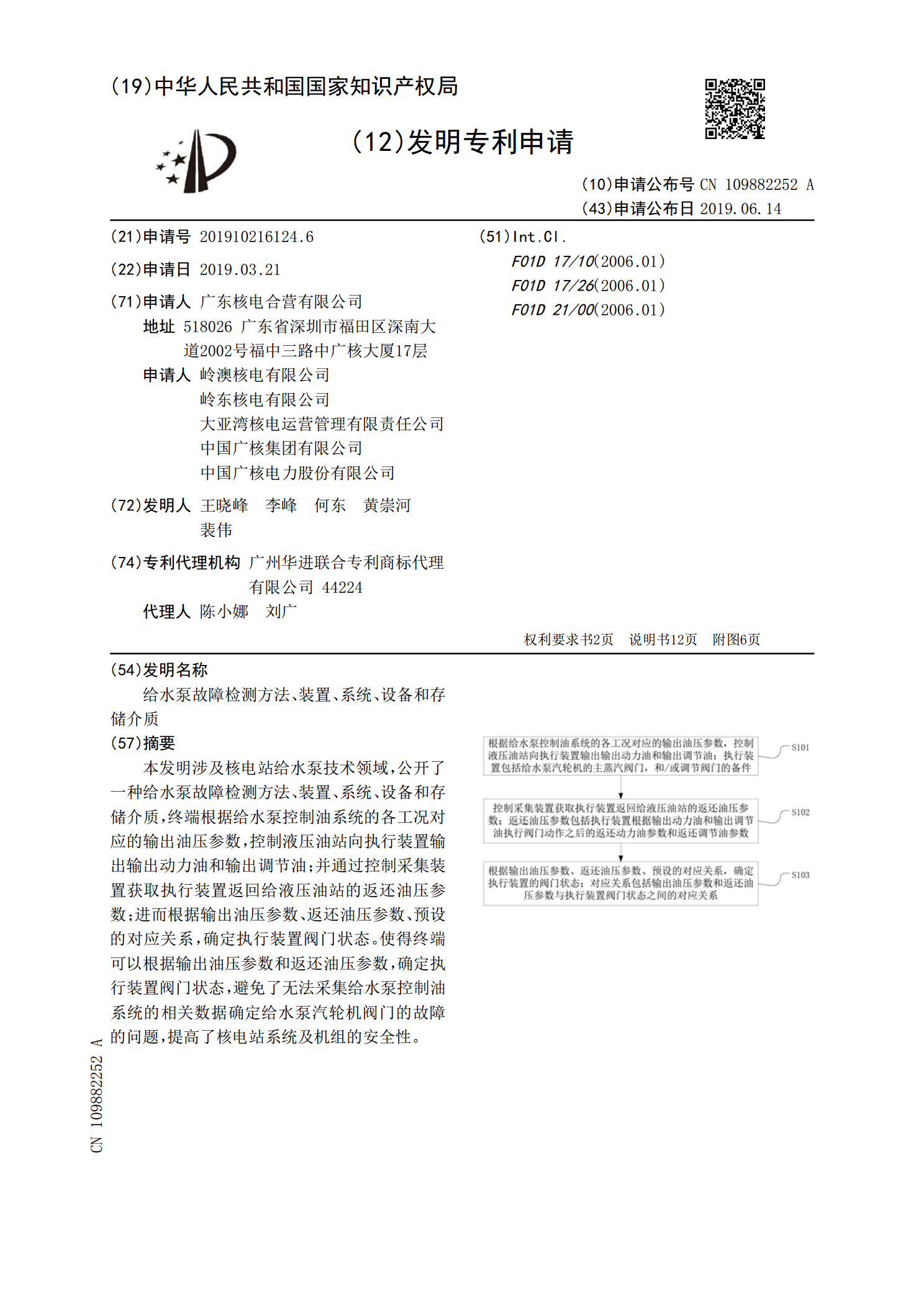
给水泵故障检测方法、装置、系统、设备和存储介质.pdf
本发明涉及核电站给水泵技术领域,公开了一种给水泵故障检测方法、装置、系统、设备和存储介质,终端根据给水泵控制油系统的各工况对应的输出油压参数,控制液压油站向执行装置输出输出动力油和输出调节油;并通过控制采集装置获取执行装置返回给液压油站的返还油压参数;进而根据输出油压参数、返还油压参数、预设的对应关系,确定执行装置阀门状态。使得终端可以根据输出油压参数和返还油压参数,确定执行装置阀门状态,避免了无法采集给水泵控制油系统的相关数据确定给水泵汽轮机阀门的故障的问题,提高了核电站系统及机组的安全性。