
一种基于鲸鱼优化算法和人工势场法结合的路径规划方法.pdf

努力****亚捷

1/9
2/9
3/9
4/9

5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于鲸鱼优化算法和人工势场法结合的路径规划方法.pdf
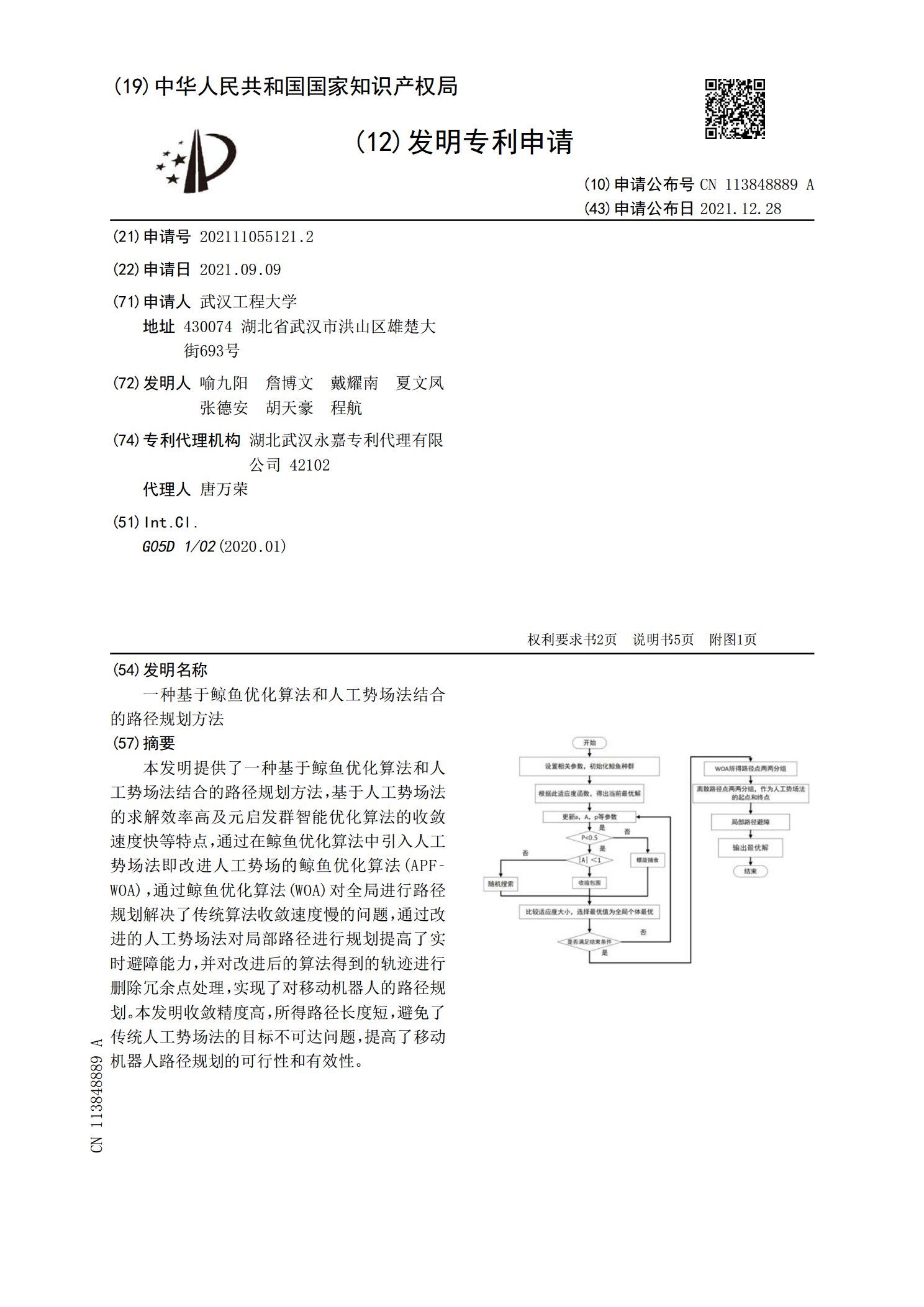
本发明提供了一种基于鲸鱼优化算法和人工势场法结合的路径规划方法,基于人工势场法的求解效率高及元启发群智能优化算法的收敛速度快等特点,通过在鲸鱼优化算法中引入人工势场法即改进人工势场的鲸鱼优化算法(APF‑WOA),通过鲸鱼优化算法(WOA)对全局进行路径规划解决了传统算法收敛速度慢的问题,通过改进的人工势场法对局部路径进行规划提高了实时避障能力,并对改进后的算法得到的轨迹进行删除冗余点处理,实现了对移动机器人的路径规划。本发明收敛精度高,所得路径长度短,避免了传统人工势场法的目标不可达问题,提高了移动机器

基于势场法的路径规划算法特性分析和路径优化.docx
基于势场法的路径规划算法特性分析和路径优化一、势场法简介势场法(PotentialFieldMethod)是一种常用的路径规划算法,其基本思路是将机器人或移动物体看作一个质点,设立目标点和障碍物点对其施加吸引和排斥力,然后根据物体的移动规律,计算其在场中的运动状态,从而完成路径规划。本文将围绕势场法的特性分析和路径优化展开。二、势场法的特性分析2.1优点(1)实现简便:只需根据目标点和障碍物点设置相应的场强和范围即可,无需对复杂的环境进行建模,易于掌握和应用。(2)计算快速:与基于图搜索的算法相比,势场法

基于改进人工势场法的路径规划算法研究.docx
基于改进人工势场法的路径规划算法研究一、概述路径规划算法作为移动机器人研究领域的重要分支,对于实现机器人的自主导航与智能控制具有至关重要的意义。传统的路径规划算法在先验环境信息已知的情况下能够展现出良好的性能,在复杂多变的未知环境中,尤其是在存在各种不规则障碍物的场景下,传统算法往往难以有效地发挥作用。如何在未知环境中实现移动机器人的高效、准确路径规划,成为了当前研究领域的热点和难点。人工势场法作为一种经典的路径规划算法,通过引入虚拟势场的概念,构造基于目标引力与障碍斥力的势场模型,使得机器人在势场中根据
一种基于鲸鱼优化算法与人工鱼群算法的旅游路径规划方法.pdf
一种基于鲸鱼优化算法与人工鱼群算法的旅游路径规划方法,首先,将鲸鱼算法中的鲸鱼群体看成预计在某时段内在相同景区游览不同景点的游客群体,对算法初始化设置并生成初始游客数,然后利用适应度函数获得初始游客当前所在位置上的适应度值(即目标函数值),从而确定初始游客的最优位置与全局最优位置并记录下来放入最优解池中。并且可以从路程的远近角度出发为游客提供一个比较舒适的旅行路线,能够在实际的旅游路径规划中帮助旅行者们寻得一条较好的旅游路径。

基于人工势场法的船舶路径规划方法、装置和存储介质.pdf
本发明公开了一种基于人工势场法的船舶路径规划方法、装置和存储介质,船舶路径规划方法包括获取船舶的行驶路径以及航路点,依序进行至少一次局部路径航行,直至船舶集群的集群中心的位置与行驶路径终点之间的距离小于预设阈值等步骤,在局部路径航行中,选择出一个目标航路点,建立人工势场,根据人工势场执行局部路径规划,获得每一船舶的局部路径,根据船舶沿局部路径行驶后的所在位置,更新船舶集群的集群中心的位置。本发明能够使得船舶集群形成一个灵活的船舶队形,能保持船舶集群整体的行驶统一协调,具有良好的实时性,避免船舶之间以及船舶