
基于人工势场法的船舶路径规划方法、装置和存储介质.pdf

邻家****曼玉


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于人工势场法的船舶路径规划方法、装置和存储介质.pdf
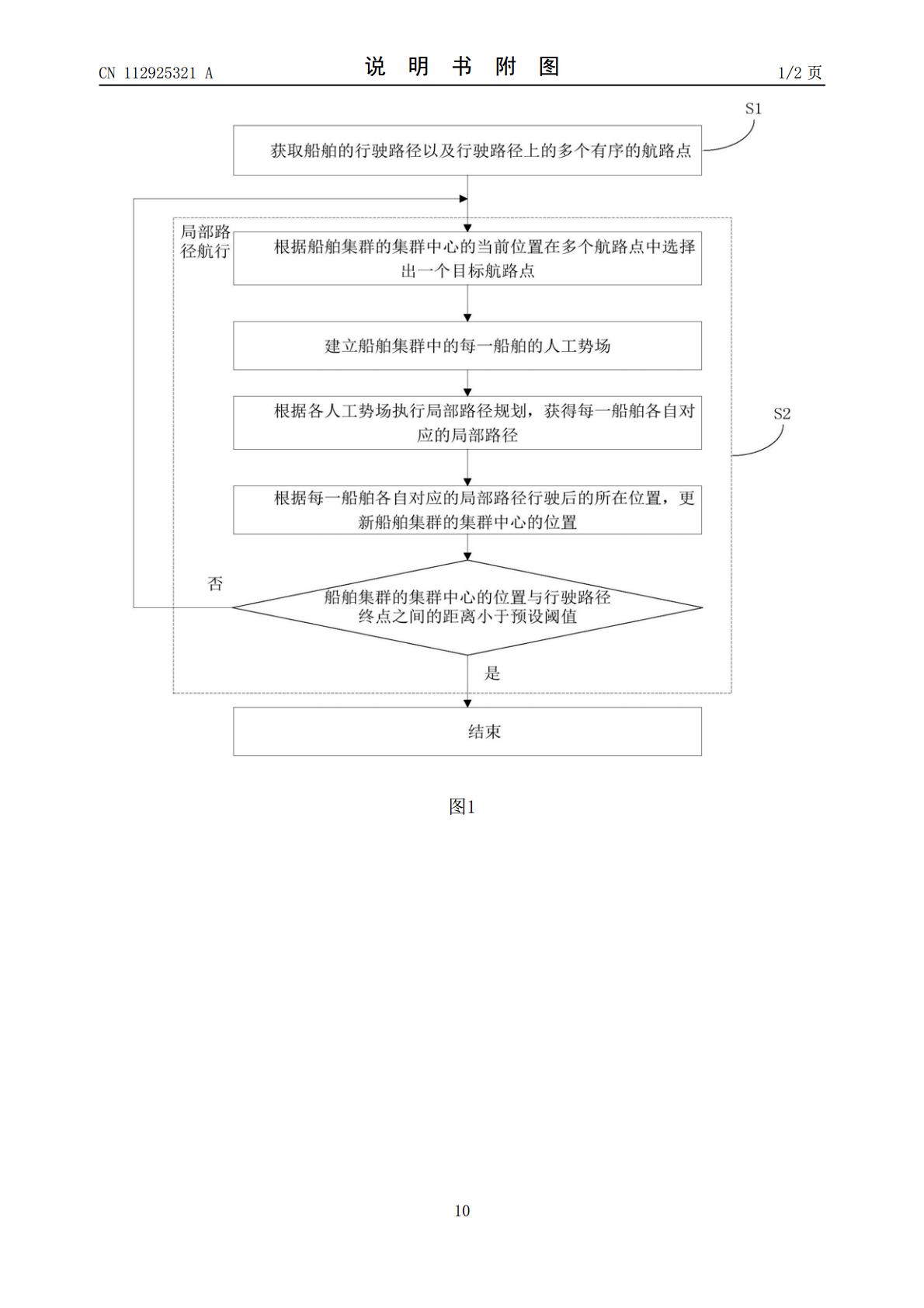
本发明公开了一种基于人工势场法的船舶路径规划方法、装置和存储介质,船舶路径规划方法包括获取船舶的行驶路径以及航路点,依序进行至少一次局部路径航行,直至船舶集群的集群中心的位置与行驶路径终点之间的距离小于预设阈值等步骤,在局部路径航行中,选择出一个目标航路点,建立人工势场,根据人工势场执行局部路径规划,获得每一船舶的局部路径,根据船舶沿局部路径行驶后的所在位置,更新船舶集群的集群中心的位置。本发明能够使得船舶集群形成一个灵活的船舶队形,能保持船舶集群整体的行驶统一协调,具有良好的实时性,避免船舶之间以及船舶

基于改进人工势场法的船舶路径规划与跟踪控制.docx
基于改进人工势场法的船舶路径规划与跟踪控制标题:基于改进人工势场法的船舶路径规划与跟踪控制摘要:随着航海技术和自主控制技术的不断进步,船舶路径规划和跟踪控制技术在实际航行中越来越重要。传统的路径规划算法存在局限性,难以解决复杂环境中的船舶碰撞和避让问题。人工势场法作为一种常用的路径规划方法,能够根据环境信息和船舶目标任务,生成安全、高效的航行路径。然而,传统的人工势场法容易出现局部最小值问题,导致船舶路径规划的失败。本文在分析传统人工势场法的基础上,提出了一种改进的人工势场法,在保证路径安全的同时,有效解

基于改进型人工势场法的机器人路径规划方法和装置.pdf
本发明提供一种基于改进型人工势场法的机器人路径规划方法和装置。方法包括:确定机器人的初始起点、最终目标点,以及机器人的决策时间窗口长度和窗口时长,并将时间针的初始值设置为第一个决策时间窗口期;在时间针的时间窗口内确定机器人的局部起点和要到达的局部目标点,基于改进型人工势场法生成周围环境的势场;根据周围环境的势场驱动机器人移动,在该时间针的时间窗口内从局部起点和到达局部目标点;判断该局部目标点是否为机器人要到达的最终目标点,若为是,则完成路径规划,若为否,则将时间针设置为机器人的下一个决策时间窗口期,继续执

基于人工势场法与入侵杂草法路径规划研究.docx
基于人工势场法与入侵杂草法路径规划研究摘要随着机器人技术的不断发展,路径规划技术也越来越受到关注。本文是基于人工势场法与入侵杂草法的路径规划研究。首先通过分析人工势场法的优点与缺点,提出了一种改进的算法。然后介绍了入侵杂草法,它是一种基于生物计算的优化算法。最后,将两种算法结合起来,实现了一种高效的路径规划方法。关键词:人工势场法;入侵杂草法;路径规划AbstractWiththecontinuousdevelopmentofrobottechnology,pathplanningtechnologyha
路径规划方法、装置、存储介质和电子装置.pdf
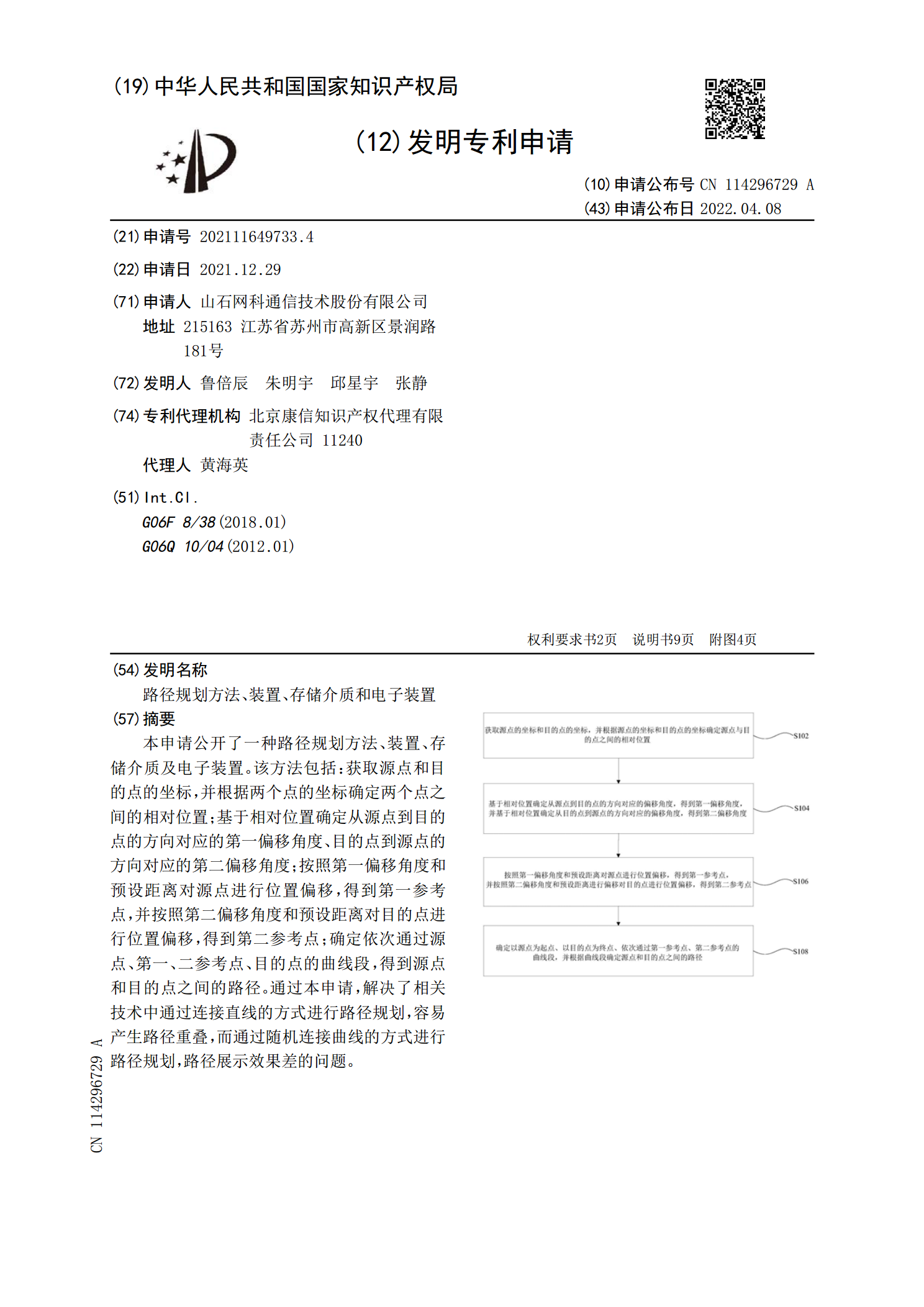
本申请公开了一种路径规划方法、装置、存储介质及电子装置。该方法包括:获取源点和目的点的坐标,并根据两个点的坐标确定两个点之间的相对位置;基于相对位置确定从源点到目的点的方向对应的第一偏移角度、目的点到源点的方向对应的第二偏移角度;按照第一偏移角度和预设距离对源点进行位置偏移,得到第一参考点,并按照第二偏移角度和预设距离对目的点进行位置偏移,得到第二参考点;确定依次通过源点、第一、二参考点、目的点的曲线段,得到源点和目的点之间的路径。通过本申请,解决了相关技术中通过连接直线的方式进行路径规划,容易产生路径重