
一种大型飞机水平导航自动控制方法.pdf

睿达****的的


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种大型飞机水平导航自动控制方法.pdf
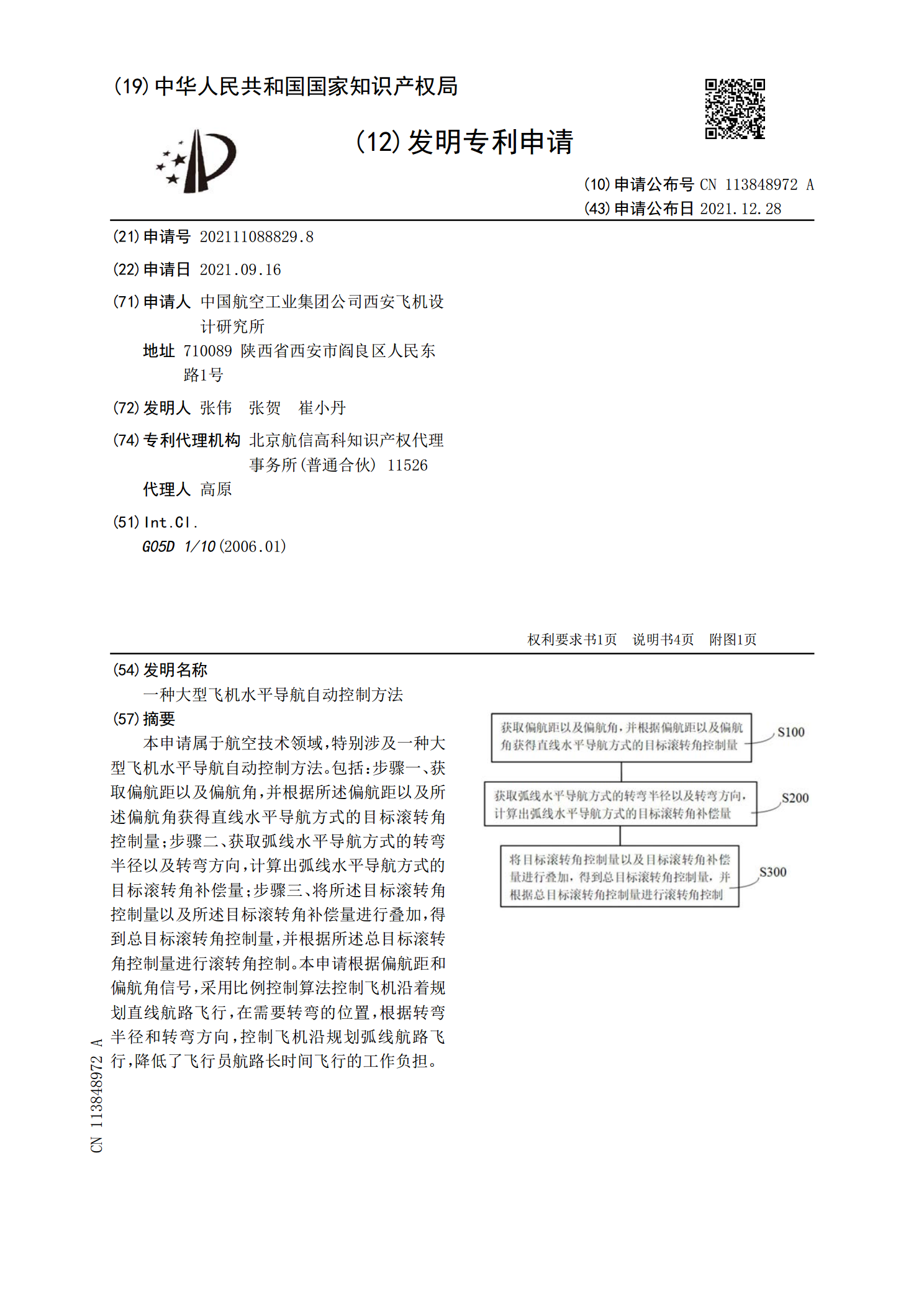
本申请属于航空技术领域,特别涉及一种大型飞机水平导航自动控制方法。包括:步骤一、获取偏航距以及偏航角,并根据所述偏航距以及所述偏航角获得直线水平导航方式的目标滚转角控制量;步骤二、获取弧线水平导航方式的转弯半径以及转弯方向,计算出弧线水平导航方式的目标滚转角补偿量;步骤三、将所述目标滚转角控制量以及所述目标滚转角补偿量进行叠加,得到总目标滚转角控制量,并根据所述总目标滚转角控制量进行滚转角控制。本申请根据偏航距和偏航角信号,采用比例控制算法控制飞机沿着规划直线航路飞行,在需要转弯的位置,根据转弯半径和转弯

一种大型飞机垂直速度自动控制方法.pdf
本申请属于航空技术领域,特别涉及一种大型飞机垂直速度自动控制方法。包括:步骤一、获取目标垂直速度以及实际垂直速度,计算出法向过载控制量;步骤二、获取滚转角以及滚转角速率,计算出飞机做滚转机动情况下的法向过载补偿量;步骤三、将法向过载控制量与法向过载补偿量进行叠加,得到法向过载增量控制指令,并根据法向过载增量控制指令,实现飞机的垂直速度自动控制。本申请通过控制飞机的垂直速度差,并且针对飞机的滚转机动,做了相应的法向过载补偿,能够保证飞机的在垂直速度模态下准确跟踪上目标垂直速度,且在进行滚转机动时能够稳定的按
一种大型飞机高度保持自动控制方法.pdf
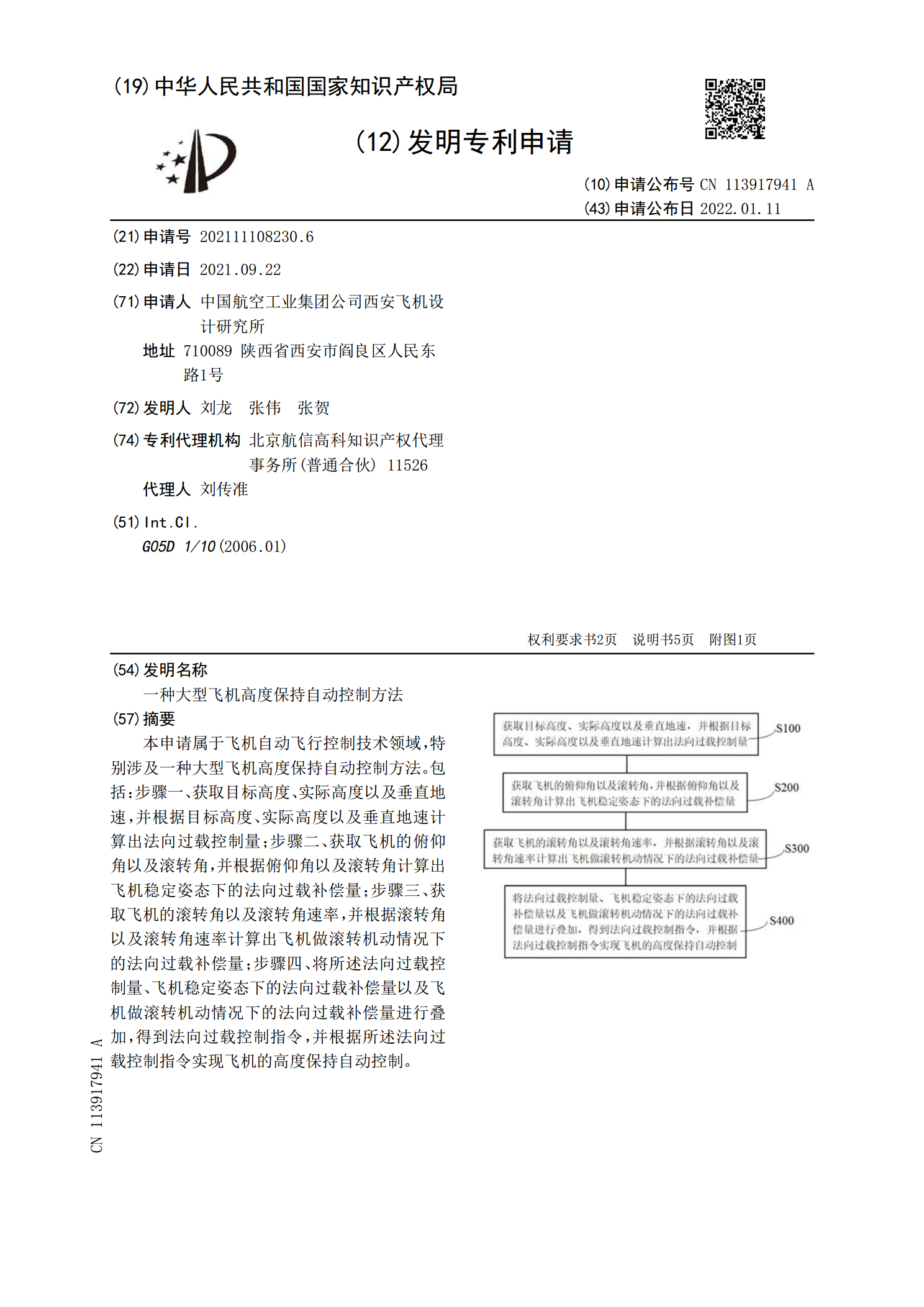
本申请属于飞机自动飞行控制技术领域,特别涉及一种大型飞机高度保持自动控制方法。包括:步骤一、获取目标高度、实际高度以及垂直地速,并根据目标高度、实际高度以及垂直地速计算出法向过载控制量;步骤二、获取飞机的俯仰角以及滚转角,并根据俯仰角以及滚转角计算出飞机稳定姿态下的法向过载补偿量;步骤三、获取飞机的滚转角以及滚转角速率,并根据滚转角以及滚转角速率计算出飞机做滚转机动情况下的法向过载补偿量;步骤四、将所述法向过载控制量、飞机稳定姿态下的法向过载补偿量以及飞机做滚转机动情况下的法向过载补偿量进行叠加,得到法向

大型船舶内部定位导航方法.docx
大型船舶内部定位导航方法在现代航海中,大型船舶内部定位导航已经成为必不可少的技术手段。其充分利用了导航卫星系统、惯性导航系统和计算机等现代化装备,以实现对船舶在内部的精确定位和导航,从而确保航行的安全、高效和精确。大型船舶内部定位导航的方法主要有多种,这些方法可以分为输入法、信息提取和数据传输、轨迹规划等模块。下面将详细介绍大型船舶内部定位导航的方法。一、输入法大型船舶内部定位导航的输入方法主要分为传统输入法和新型输入法两种。传统输入法主要包括人工输入和机械输入两种方式。其中,人工输入主要是在船舶内部安装

一种大型森林灭火飞机.pdf
本发明涉及森林灭火飞机领域,特别是涉及一种大型森林灭火飞机。该飞机包括:飞机本体1,安装在飞机本体内的至少一个灭火剂方舱2和喷洒控制系统3;灭火剂方舱2内装有灭火剂;其中灭火剂方舱2之间相互连通;一个或多个灭火剂方舱上方留有注入口21设置有注入开关,已确保在开启时注入灭火剂,关闭后不会渗水;最靠近后货舱门的灭火剂方舱设置有喷洒开关22;喷洒控制系统3由空投操作员控制喷洒开关22。