
适用于被动成像与主动成像的快速成像方法.pdf

Ch****49

1/10
2/10
3/10
4/10
5/10
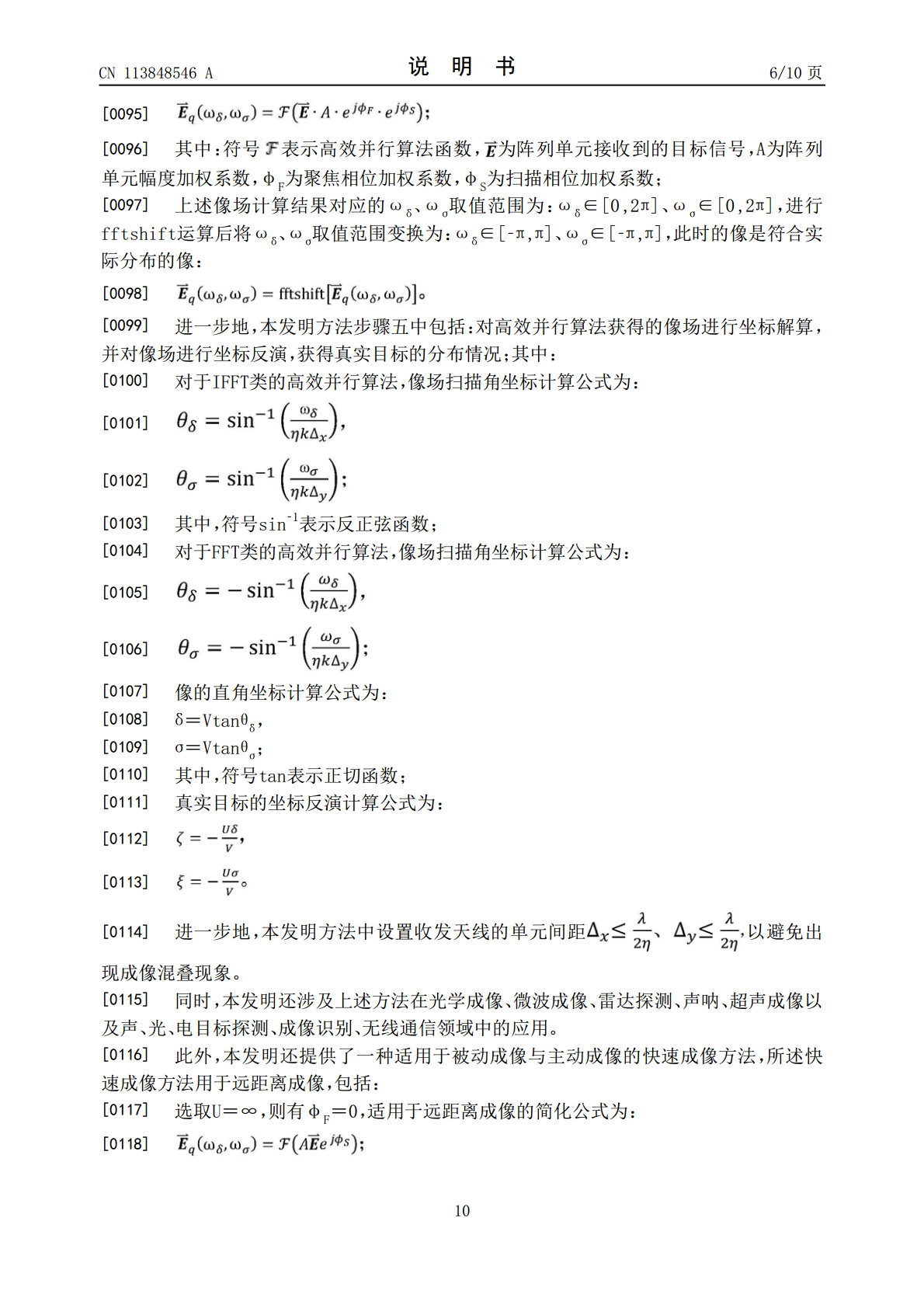
6/10
7/10

8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
适用于被动成像与主动成像的快速成像方法.pdf
本发明涉及光学成像、微波成像、雷达探测、声呐、超声成像以及基于声、光、电等媒介的目标探测、成像识别、无线通信技术领域,具体涉及一种适用于被动成像与主动成像的快速成像方法及其在上述各领域中的应用。本发明方法基于透镜成像原理,结合电磁场理论,根据天线阵列接收到的目标信号,通过单元信号的幅度、相位加权,采用高效并行算法,获得目标对应的像场分布。本发明方法具有可同时兼容被动成像和全息成像、成像效果佳、运算量小、硬件成本低、成像速度快、可适用于远距离成像等优点,可广泛应用于光学成像、微波成像、雷达探测、声呐、超声成
基于主动成像卫星的变成像时长规划方法及系统.pdf
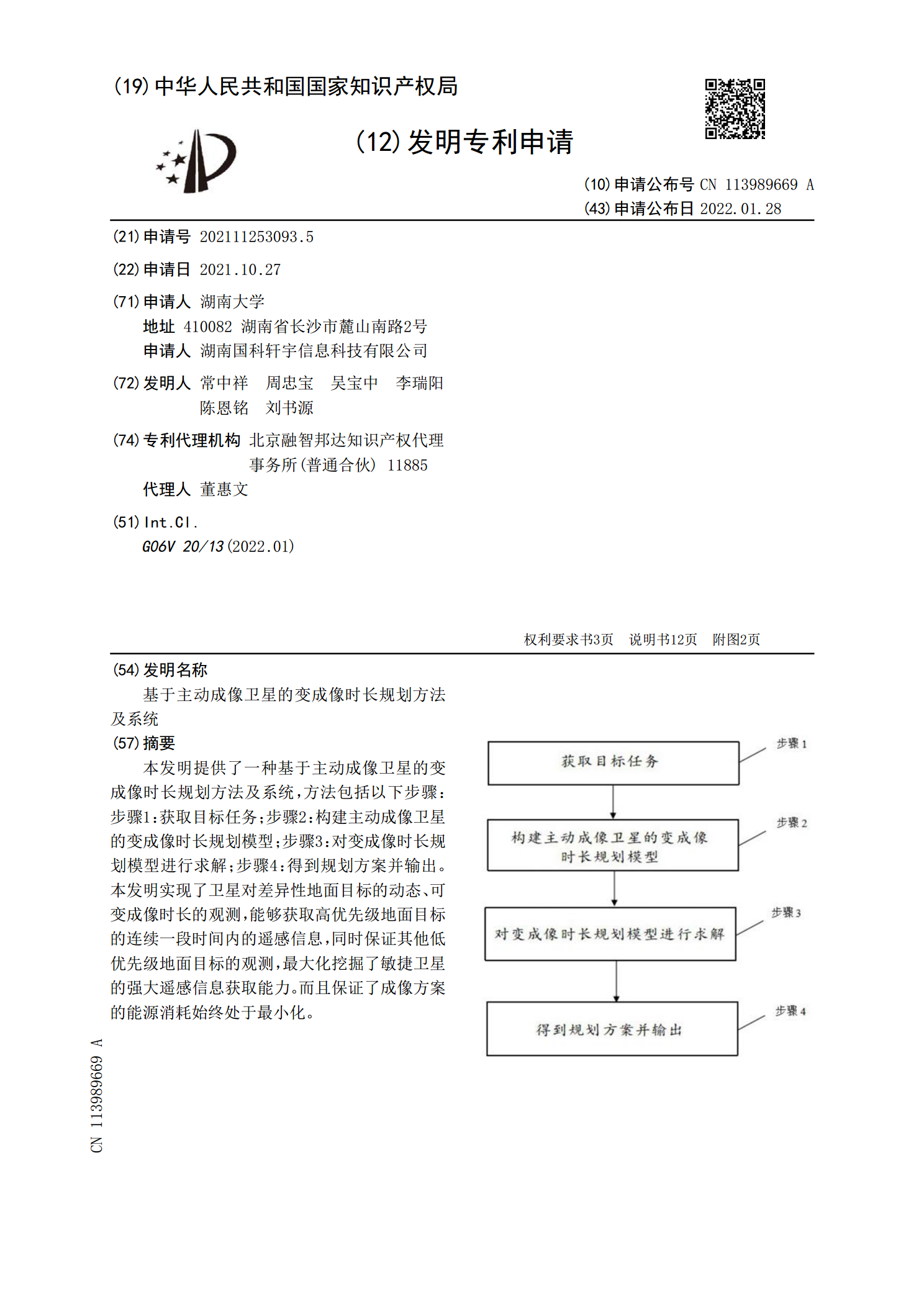
本发明提供了一种基于主动成像卫星的变成像时长规划方法及系统,方法包括以下步骤:步骤1:获取目标任务;步骤2:构建主动成像卫星的变成像时长规划模型;步骤3:对变成像时长规划模型进行求解;步骤4:得到规划方案并输出。本发明实现了卫星对差异性地面目标的动态、可变成像时长的观测,能够获取高优先级地面目标的连续一段时间内的遥感信息,同时保证其他低优先级地面目标的观测,最大化挖掘了敏捷卫星的强大遥感信息获取能力。而且保证了成像方案的能源消耗始终处于最小化。
被动综合孔径快速扫描成像系统.pdf
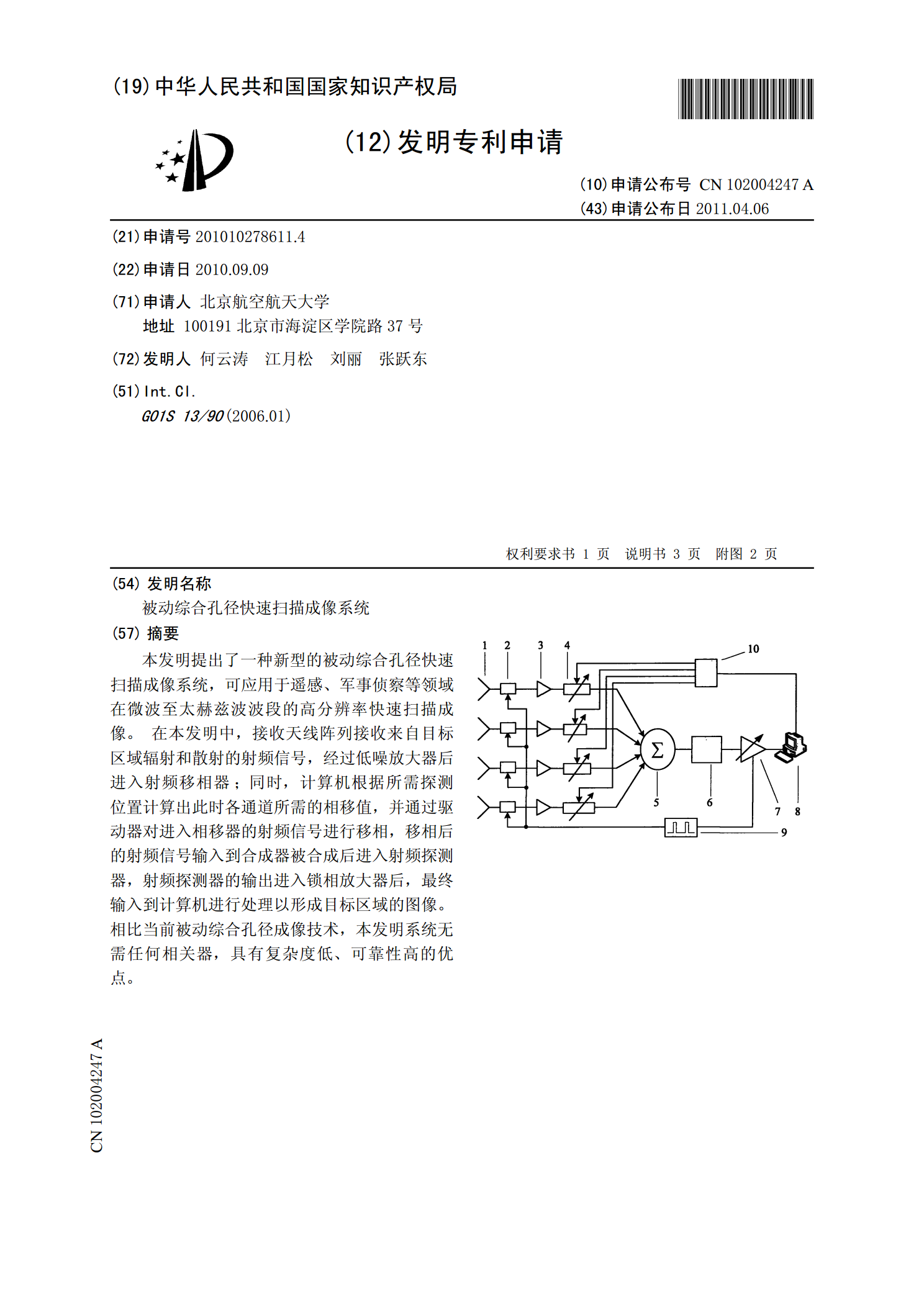
本发明提出了一种新型的被动综合孔径快速扫描成像系统,可应用于遥感、军事侦察等领域在微波至太赫兹波波段的高分辨率快速扫描成像。在本发明中,接收天线阵列接收来自目标区域辐射和散射的射频信号,经过低噪放大器后进入射频移相器;同时,计算机根据所需探测位置计算出此时各通道所需的相移值,并通过驱动器对进入相移器的射频信号进行移相,移相后的射频信号输入到合成器被合成后进入射频探测器,射频探测器的输出进入锁相放大器后,最终输入到计算机进行处理以形成目标区域的图像。相比当前被动综合孔径成像技术,本发明系统无需任何相关器,具

成像装置、成像系统和成像方法.pdf
一种成像装置包括:成像单元,配置为拍摄多个图像,该成像单元包括:多个成像部件,每个配置为获取与所拍摄的多个图像中的一个图像相关的成像数据项,以及布线部件,配置为传输多个成像部件获取的多个成像数据项。该布线部件包括:外部部件,形成布线部件的轮廓;以及线缆部件,布置在外部部件的内部。多个成像部件沿着布线部件的纵向布置,并且配置成像单元,以获取对应于多个成像位置的多个成像数据项,并且利用线缆部件传输多个成像数据项。
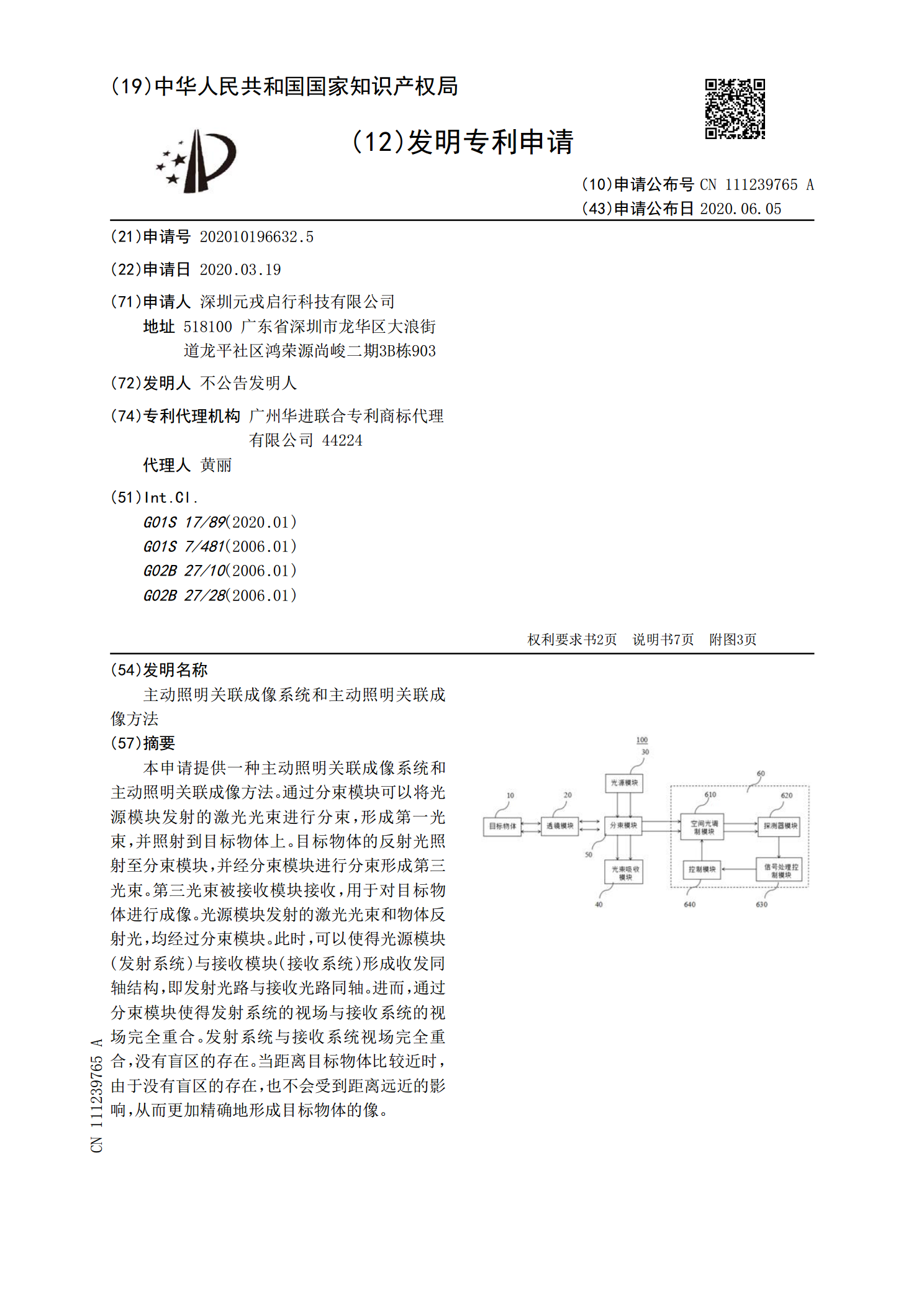
主动照明关联成像系统和主动照明关联成像方法.pdf
本申请提供一种主动照明关联成像系统和主动照明关联成像方法。通过分束模块可以将光源模块发射的激光光束进行分束,形成第一光束,并照射到目标物体上。目标物体的反射光照射至分束模块,并经分束模块进行分束形成第三光束。第三光束被接收模块接收,用于对目标物体进行成像。光源模块发射的激光光束和物体反射光,均经过分束模块。此时,可以使得光源模块(发射系统)与接收模块(接收系统)形成收发同轴结构,即发射光路与接收光路同轴。进而,通过分束模块使得发射系统的视场与接收系统的视场完全重合。发射系统与接收系统视场完全重合,没有盲区