
车辆控制方法及车辆控制装置.pdf

慧娇****文章

1/10
2/10
3/10
4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共33页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆控制方法及车辆控制装置.pdf
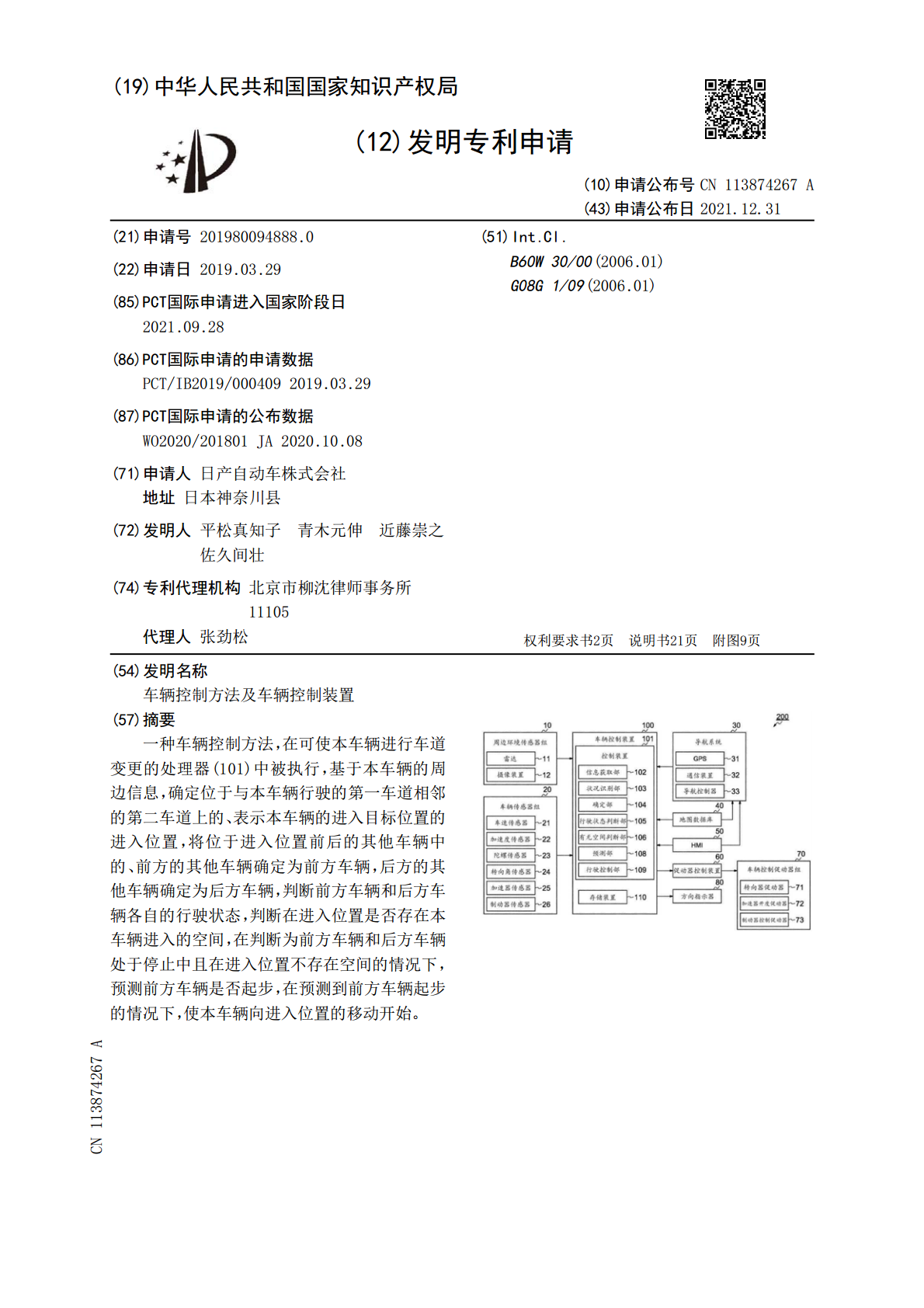
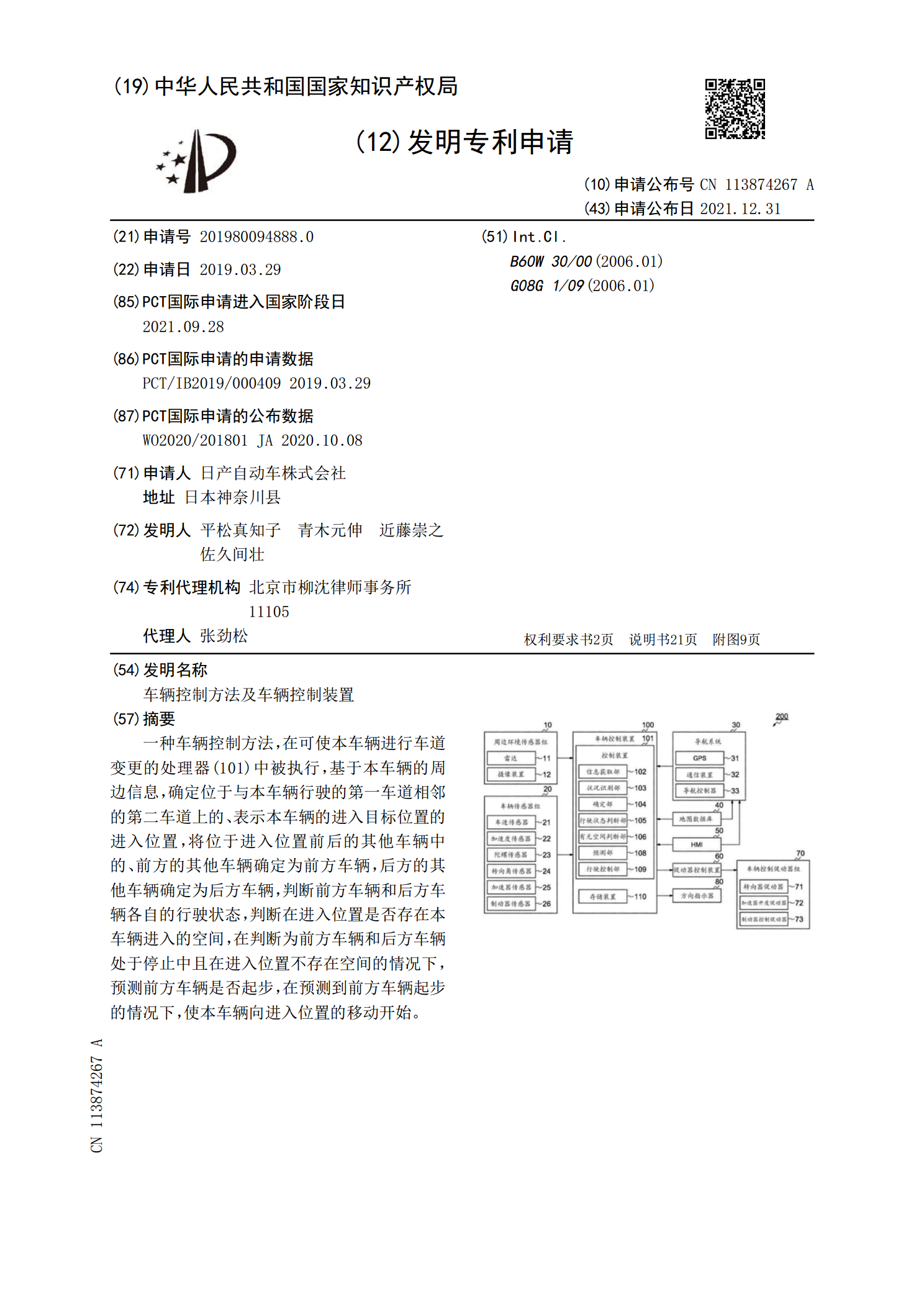
一种车辆控制方法,在可使本车辆进行车道变更的处理器(101)中被执行,基于本车辆的周边信息,确定位于与本车辆行驶的第一车道相邻的第二车道上的、表示本车辆的进入目标位置的进入位置,将位于进入位置前后的其他车辆中的、前方的其他车辆确定为前方车辆,后方的其他车辆确定为后方车辆,判断前方车辆和后方车辆各自的行驶状态,判断在进入位置是否存在本车辆进入的空间,在判断为前方车辆和后方车辆处于停止中且在进入位置不存在空间的情况下,预测前方车辆是否起步,在预测到前方车辆起步的情况下,使本车辆向进入位置的移动开始。

车辆控制方法及车辆控制装置.pdf
本发明是使用具备检测本车辆的外部状态的传感器及控制装置的车辆控制装置,控制车辆的车辆控制方法,其中,赋予相对于本车辆的行驶车道向横方向的操舵量,将使本车辆的行驶轨迹恢复到目标轨迹的控制作为通常控制执行,使用传感器的检测数据,判定其它车辆是否在与本车辆的行驶车道邻接的邻接车道行驶,在判定出其它车辆在本车辆的前方,在邻接车道行驶的情况下,在本车辆通过其它车辆前使操舵量的响应性比通常控制时的操舵量的响应性高。

车辆控制方法及车辆控制装置.pdf
本发明的车辆控制装置(1)设定道路上的区域并且是从静止物体起沿着道路的延伸方向的规定距离范围的、包含静止物体而形成的区域,基于本车辆的速度和对向车辆的位置及速度,计算本车辆与对向车辆错车的位置,计算随着对向车辆的速度越大则值越变大的第一得分值,计算随着对向车辆的加速度越大则值越变大的第二得分值,综合第一得分值和第二得分值来计算综合得分值,在错车的位置存在于区域内的情况下,在综合得分值为规定值以上的情况下使本车辆减速,在综合得分值小于规定值的情况下维持本车辆的速度或者使本车辆加速。

车辆控制装置及车辆控制方法.pdf
在车辆控制装置中,控制单元执行停止控制和重启控制。惯性加速度获取单元获取当车辆在车轮没有被施加以制动力的情况下行进时车辆的估算加速度,作为惯性加速度。惯性车速估算单元基于惯性加速度来获取自发动机由于停止控制而停止时起经过了重启发动机所需的重启时间的时刻处的车速,作为第一车速估算值。当第一车速估算值小于被设置用于判定是否执行制动控制的制动控制许可基准值时,控制单元执行重启控制。

车辆控制装置及车辆控制方法.pdf
本发明提供能够兼顾在μ高的路面的车辆的转弯性能的提高和在μ低的路面的车辆行为的稳定性的提高的车辆控制装置及车辆控制方法。一种车辆控制装置,具备:基于车辆的横摆角速度确定附加横摆力矩的附加横摆力矩确定部;判定所述车辆的自旋倾向的自旋倾向判定部;在判定为所述车辆有自旋倾向的情况下,确定用于控制所述旋转差的旋转差控制量,使得所述车辆的前方左右轮的旋转差缩小的方式的旋转差确定部;基于所述附加横摆力矩,确定用于控制所述车辆的后轮的制动驱动力的后轮制动驱动力控制量的后轮制动驱动力确定部;以及基于所述旋转差控制量,确定