
一种碰撞风险的确定方法、装置、电子设备及存储介质.pdf

一吃****成益


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种碰撞风险的确定方法、装置、电子设备及存储介质.pdf
本发明提供一种碰撞风险的确定方法、装置、电子设备及存储介质,涉及车辆辅助驾驶技术领域,解决了现有技术无法准确地确定出车辆与某一物体(例如其他车辆)之间是否存在碰撞风险,影响碰撞风险预测的有效性的技术问题。该方法包括:获取车辆的位置信息和目标障碍物的位置信息;基于该车辆的位置信息和该目标障碍物的位置信息,确定该目标障碍物是否位于该当前道路的主车道;在该目标障碍物位于该主车道,并且该车辆的行驶速度大于该目标障碍物对应的速度的情况下,确定该车辆与该目标障碍物之间存在碰撞风险。

指纹碰撞确定方法、装置、存储介质及电子设备.pdf
本公开是关于一种指纹碰撞确定方法、装置、存储介质及电子设备,涉及计算机技术领域,该方法包括:先获取目标时间段内多个被恢复设备的待验证信息,根据被恢复设备的当前设备信息与目标登录ID关联的历史设备信息,确定被恢复设备的关键字验证结果,根据当前设备信息中包含的当前开机时间与目标登录ID记录的历史开机时间,确定被恢复设备的时间推理结果,当关键字验证结果和时间推理结果不符合预设验证条件时,确定被恢复设备发生指纹碰撞。这样,可以在设备型号或系统更新时,直接基于采集到的特征信息进行自查,根据关键字验证结果和时间推理结

一种项目风险确定方法、装置、电子设备及存储介质.pdf
本申请实施例提供了一种项目风险确定方法、装置、电子设备及存储介质,该方法包括:在确定待处理项目中各预设特征的目标特征值后,基于待处理项目中所有预设特征的目标特征值的整体分布,确定所述待处理项目中各预设特征的目标比例系数;基于所述待处理项目中所述各预设特征的目标特征值以及所述各预设特征的目标比例系数,确定所述待处理项目的风险信息;其中,所述风险信息表征对应项目的风险程度。上述方法通过确定出表征对应项目的风险程度的风险信息,从而对各待处理项目的风险进行了精准评估,提升项目的稳健性。
一种碰撞预警的方法、装置、电子设备及存储介质.pdf
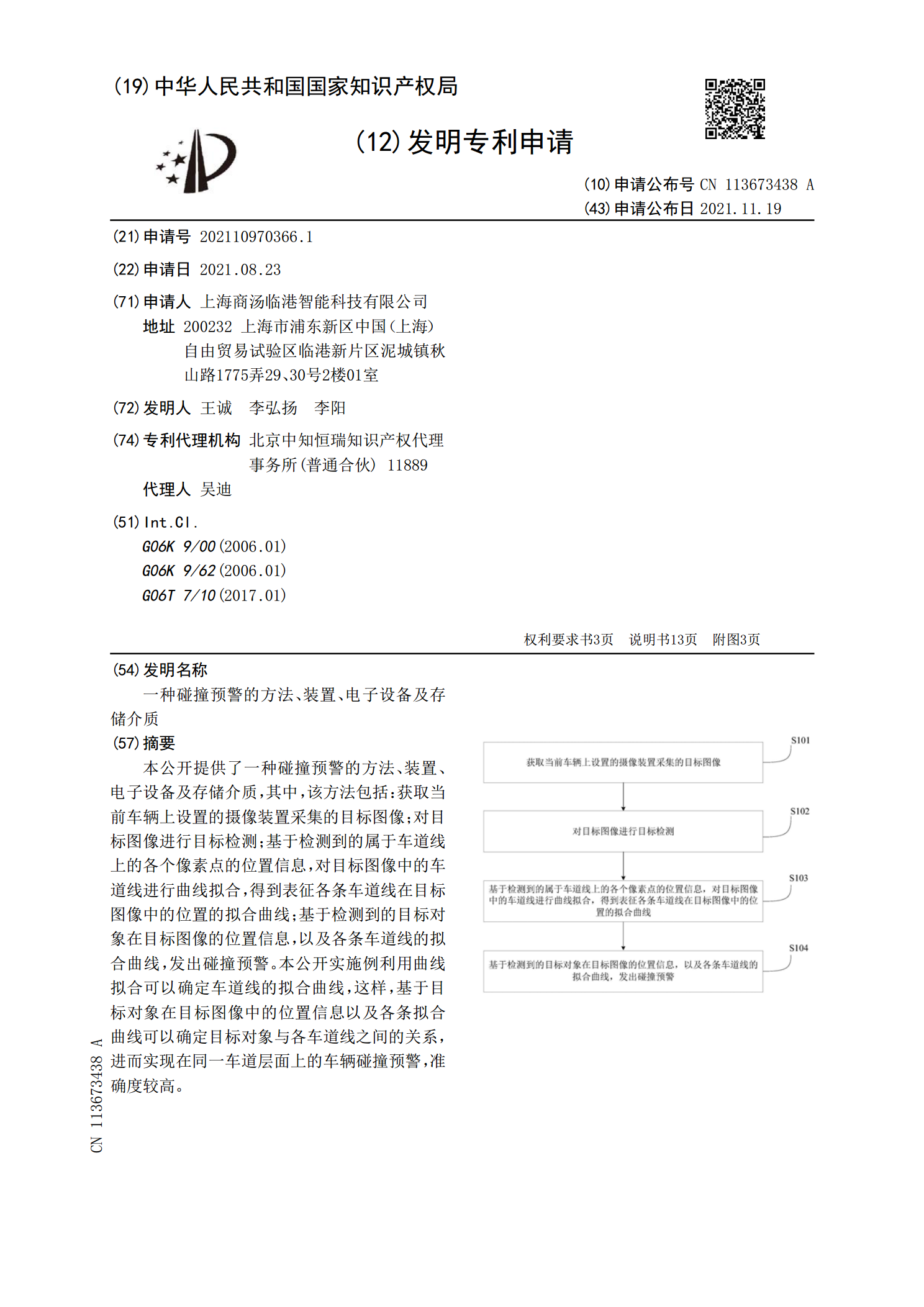
本公开提供了一种碰撞预警的方法、装置、电子设备及存储介质,其中,该方法包括:获取当前车辆上设置的摄像装置采集的目标图像;对目标图像进行目标检测;基于检测到的属于车道线上的各个像素点的位置信息,对目标图像中的车道线进行曲线拟合,得到表征各条车道线在目标图像中的位置的拟合曲线;基于检测到的目标对象在目标图像的位置信息,以及各条车道线的拟合曲线,发出碰撞预警。本公开实施例利用曲线拟合可以确定车道线的拟合曲线,这样,基于目标对象在目标图像中的位置信息以及各条拟合曲线可以确定目标对象与各车道线之间的关系,进而实现在

一种模式确定方法、装置、电子设备及存储介质.pdf
本申请提供了一种模式确定方法、装置、电子设备及存储介质,属于智能家电技术领域。本申请通过,获取目标设备的设备信息及所述目标设备对应的对象信息,所述对象信息为使用所述设备的对象的信息;将所述设备信息和所述对象信息输入至知识图谱中,以使所述知识图谱输出与所述目标设备对应的安全等级,其中,所述知识图谱是预先基于至少一个样本设备对应的样本设备信息,以及,每个所述样本设备对应的样本对象信息构建的;基于所述安全等级确定所述目标设备对应的目标运行模式。以实现通过设备对应的安全等级为设备匹配适合的运行模式,从而保证对象安