
一种基于单目视觉的车长测量方法和装置.pdf

一吃****春晓

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于单目视觉的车长测量方法和装置.pdf
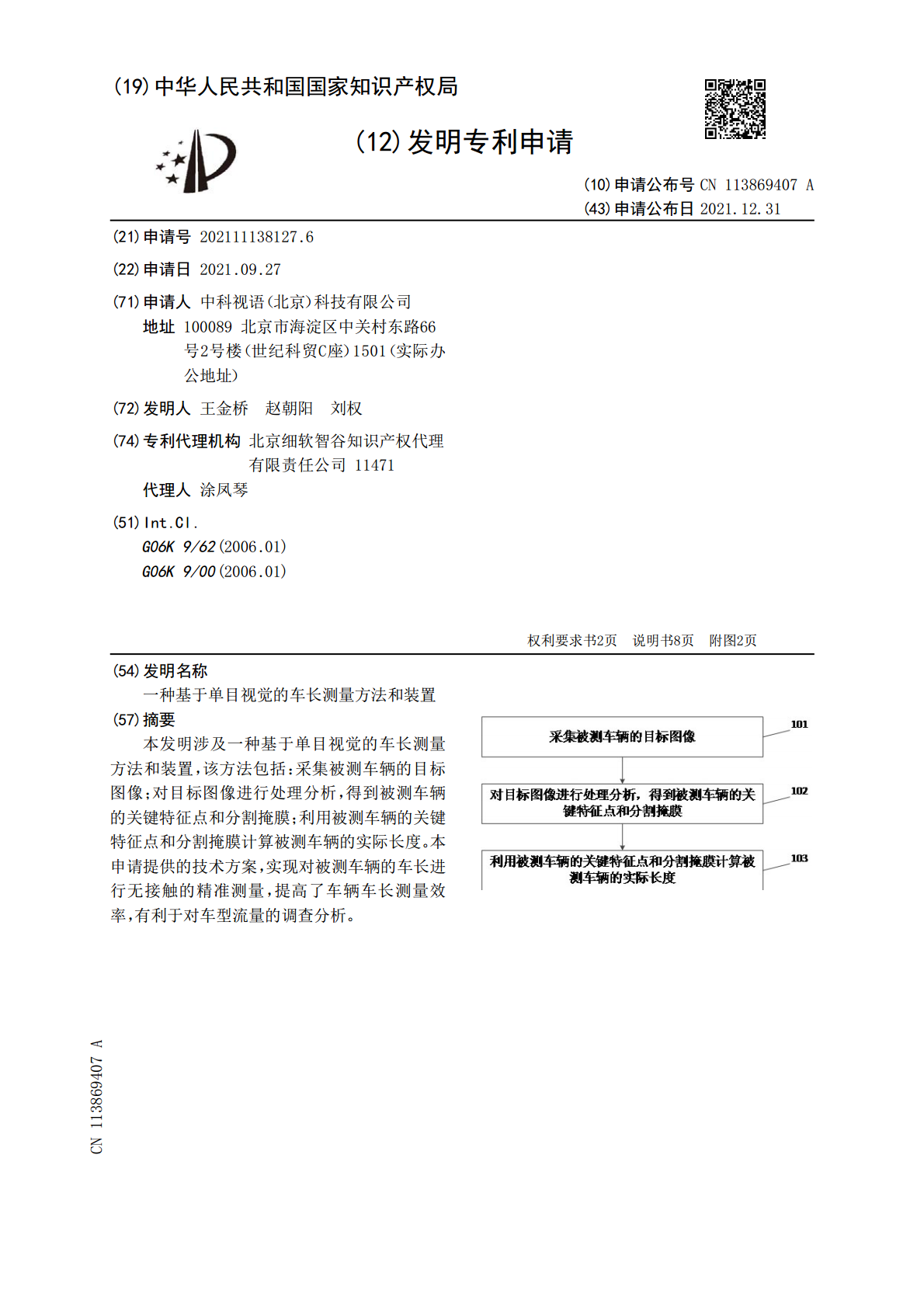
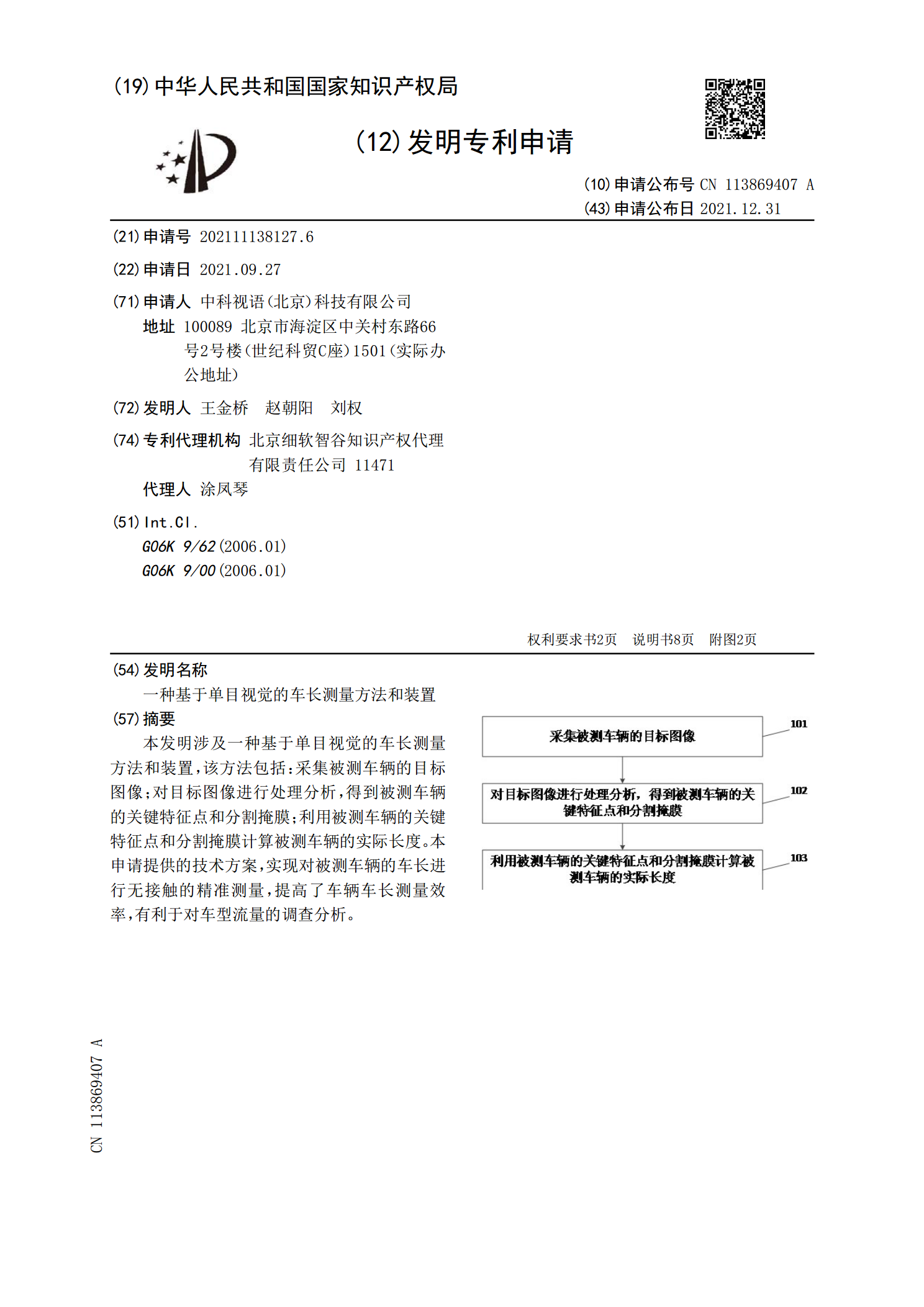
本发明涉及一种基于单目视觉的车长测量方法和装置,该方法包括:采集被测车辆的目标图像;对目标图像进行处理分析,得到被测车辆的关键特征点和分割掩膜;利用被测车辆的关键特征点和分割掩膜计算被测车辆的实际长度。本申请提供的技术方案,实现对被测车辆的车长进行无接触的精准测量,提高了车辆车长测量效率,有利于对车型流量的调查分析。

基于单目计算机视觉测量方法监测船舶超高装置.pdf
本发明公开了基于单目计算机视觉测量方法监测船舶超高装置,包括安装壳,安装壳的底面安装有支撑杆,支撑杆的下端安装有浮板,且支撑杆插接在安装柱内,安装壳的后端封实,前端插接有玻璃板,安装壳的内部设有卡环,卡环的内部卡有红外线仪,红外线仪上安装有耳板,耳板上开设有定位孔,本发明将红外线仪安装在安装壳的内部,在安装壳的下端安装了支撑杆和浮板,并将支撑杆采用插接的方式与安装柱连接,使得在使用的时候,随着潮涨潮汐,浮板能带动安装壳随着海水的高度变化而变化,方便测量船舶的高度,同时在安装壳的前端设置了玻璃板,就能够对安
一种视觉测量方法和装置.pdf
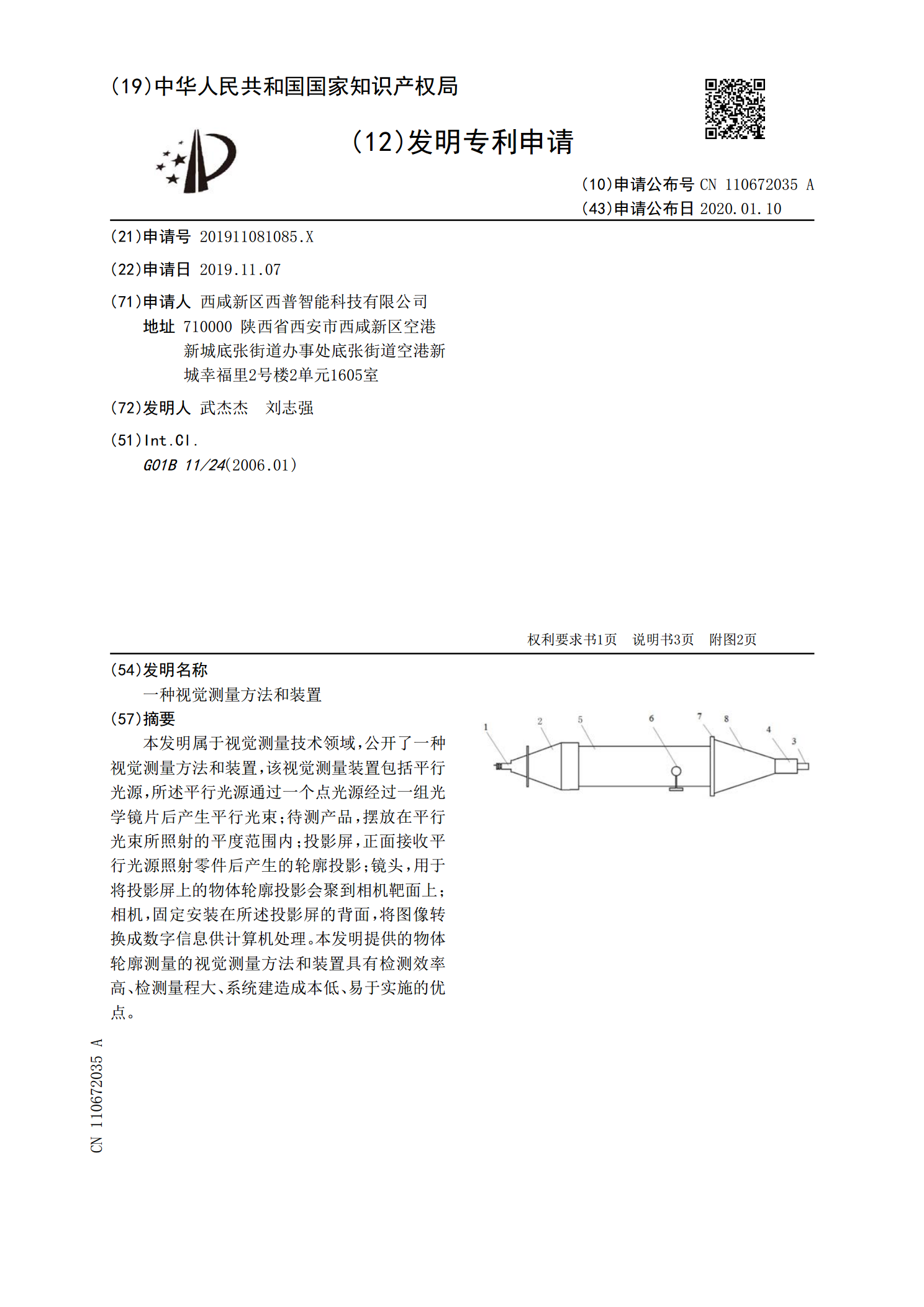
本发明属于视觉测量技术领域,公开了一种视觉测量方法和装置,该视觉测量装置包括平行光源,所述平行光源通过一个点光源经过一组光学镜片后产生平行光束;待测产品,摆放在平行光束所照射的平度范围内;投影屏,正面接收平行光源照射零件后产生的轮廓投影;镜头,用于将投影屏上的物体轮廓投影会聚到相机靶面上;相机,固定安装在所述投影屏的背面,将图像转换成数字信息供计算机处理。本发明提供的物体轮廓测量的视觉测量方法和装置具有检测效率高、检测量程大、系统建造成本低、易于实施的优点。
基于单目视觉的人体身高测量方法、装置及电子设备.pdf
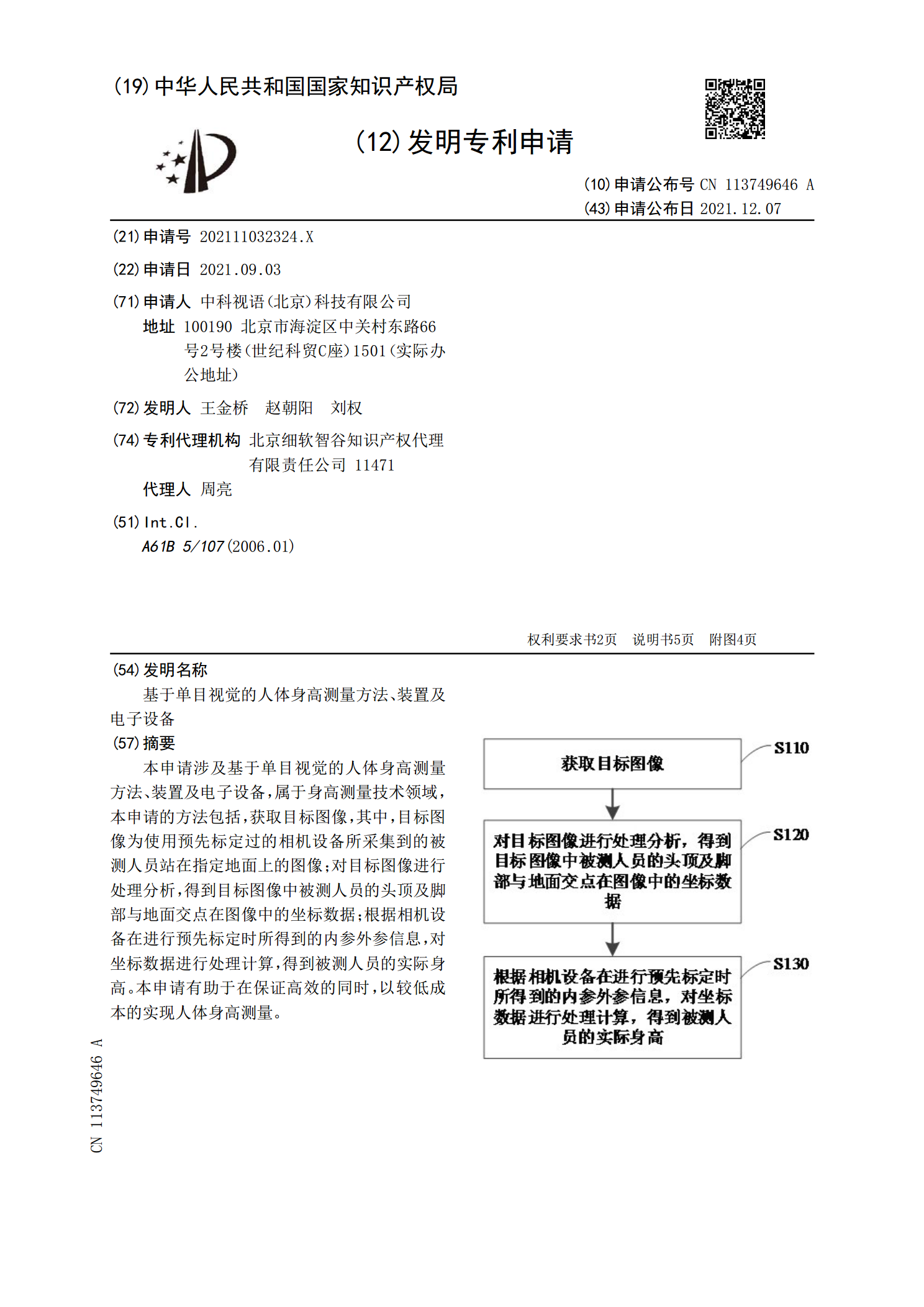
本申请涉及基于单目视觉的人体身高测量方法、装置及电子设备,属于身高测量技术领域,本申请的方法包括,获取目标图像,其中,目标图像为使用预先标定过的相机设备所采集到的被测人员站在指定地面上的图像;对目标图像进行处理分析,得到目标图像中被测人员的头顶及脚部与地面交点在图像中的坐标数据;根据相机设备在进行预先标定时所得到的内参外参信息,对坐标数据进行处理计算,得到被测人员的实际身高。本申请有助于在保证高效的同时,以较低成本的实现人体身高测量。
一种基于单目视觉的自动测量系统及测量方法.pdf
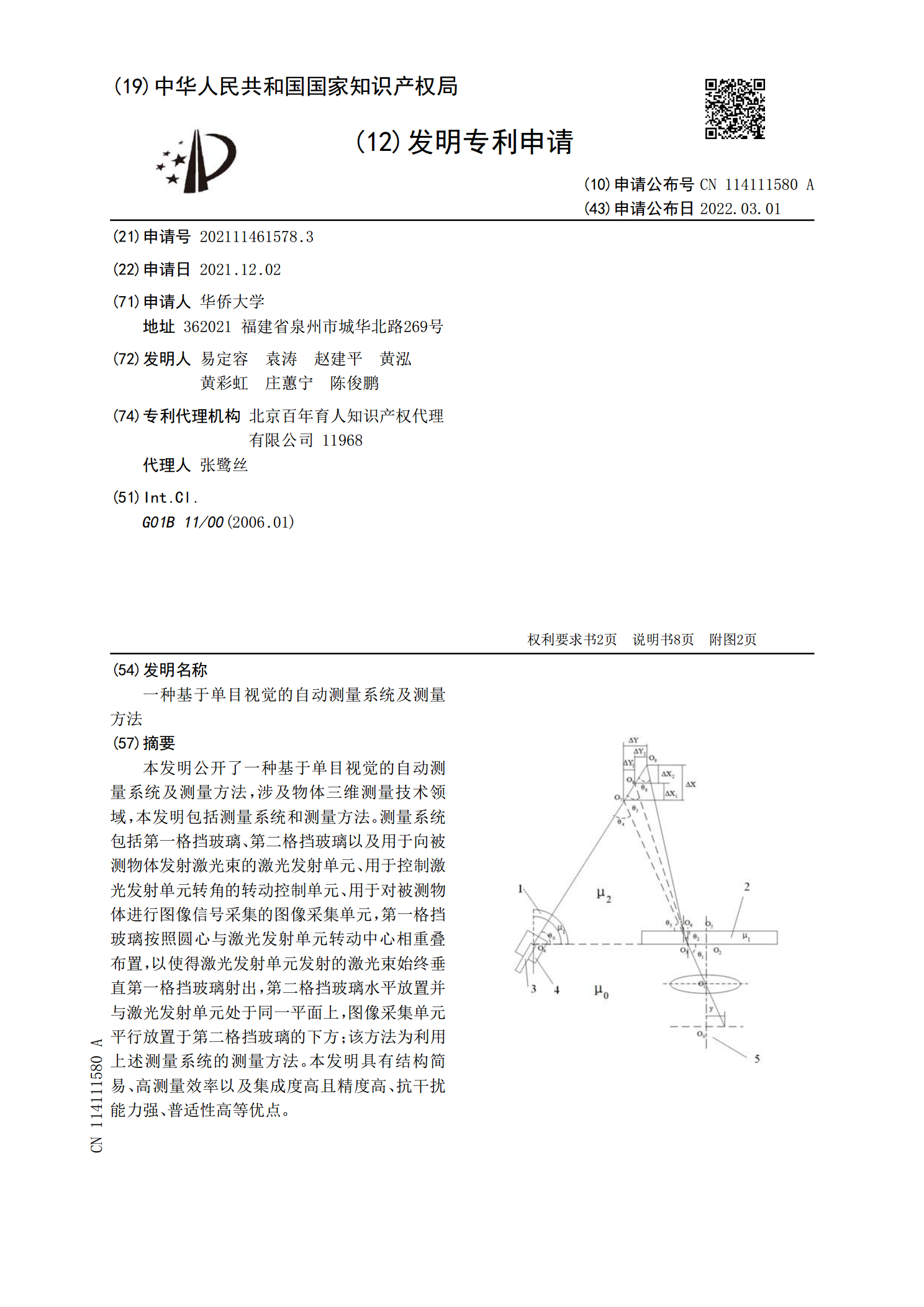
本发明公开了一种基于单目视觉的自动测量系统及测量方法,涉及物体三维测量技术领域,本发明包括测量系统和测量方法。测量系统包括第一格挡玻璃、第二格挡玻璃以及用于向被测物体发射激光束的激光发射单元、用于控制激光发射单元转角的转动控制单元、用于对被测物体进行图像信号采集的图像采集单元,第一格挡玻璃按照圆心与激光发射单元转动中心相重叠布置,以使得激光发射单元发射的激光束始终垂直第一格挡玻璃射出,第二格挡玻璃水平放置并与激光发射单元处于同一平面上,图像采集单元平行放置于第二格挡玻璃的下方;该方法为利用上述测量系统的测