
手术交互行为识别方法、装置、存储介质和电子设备.pdf

论文****可爱


1/10

2/10

3/10

4/10
5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

手术交互行为识别方法、装置、存储介质和电子设备.pdf
本发明提供了一种手术交互行为识别方法、装置、存储介质和电子设备,涉及手术交互行为识别技术领域。本发明提出一种能学习到手术器械间、交互行为间的关系以及内窥镜图像与手术器械间和内窥镜图像与交互行为间的关系的深度学习模型。该模型能够预测出当前细粒度手术交互行为,即使用何种手术器械对哪个目标进行何种操作。
目标行为的识别方法、装置、电子设备和存储介质.pdf
本申请提出一种目标行为的识别方法、装置、电子设备和存储介质,方法包括获取目标视频数据和目标音频数据,其中目标视频数据和目标音频数据分别通过对检测目标所处的检测区域进行视频数据和音频数据采集得到,基于目标视频数据和目标音频数据,能够确定检测目标是否出现目标行为,进而保证管控效果。本方案结合目标视频数据和目标音频数据,从多种模态进行目标行为识别,有效提高目标行为识别的准确性。将上述方案应用于对河道、海中等采砂区域的管控中,能够及时发现采砂船是否进行盗采行为,保证采砂区域的管控效果。

行为识别方法、装置、存储介质及电子设备.pdf
本公开涉及计算机技术领域,具体涉及行为识别方法、行为识别装置、存储介质及电子设备。该行为识别方法包括:获取目标对象的多项骨骼数据特征;使用分支位移卷积子网络对所述多项骨骼数据特征进行分支处理得到多项特征映射;通过融合位移卷积子网络将所述多项特征映射进行主流融合得到特征向量;利用全连接层根据所述特征向量进行识别得到所述目标对象的行为信息。本公开提供的行为识别方法能够解决现有技术中基于骨骼进行行为识别时计算量大的问题。
目标行为的身份识别方法、装置、电子设备和存储介质.pdf
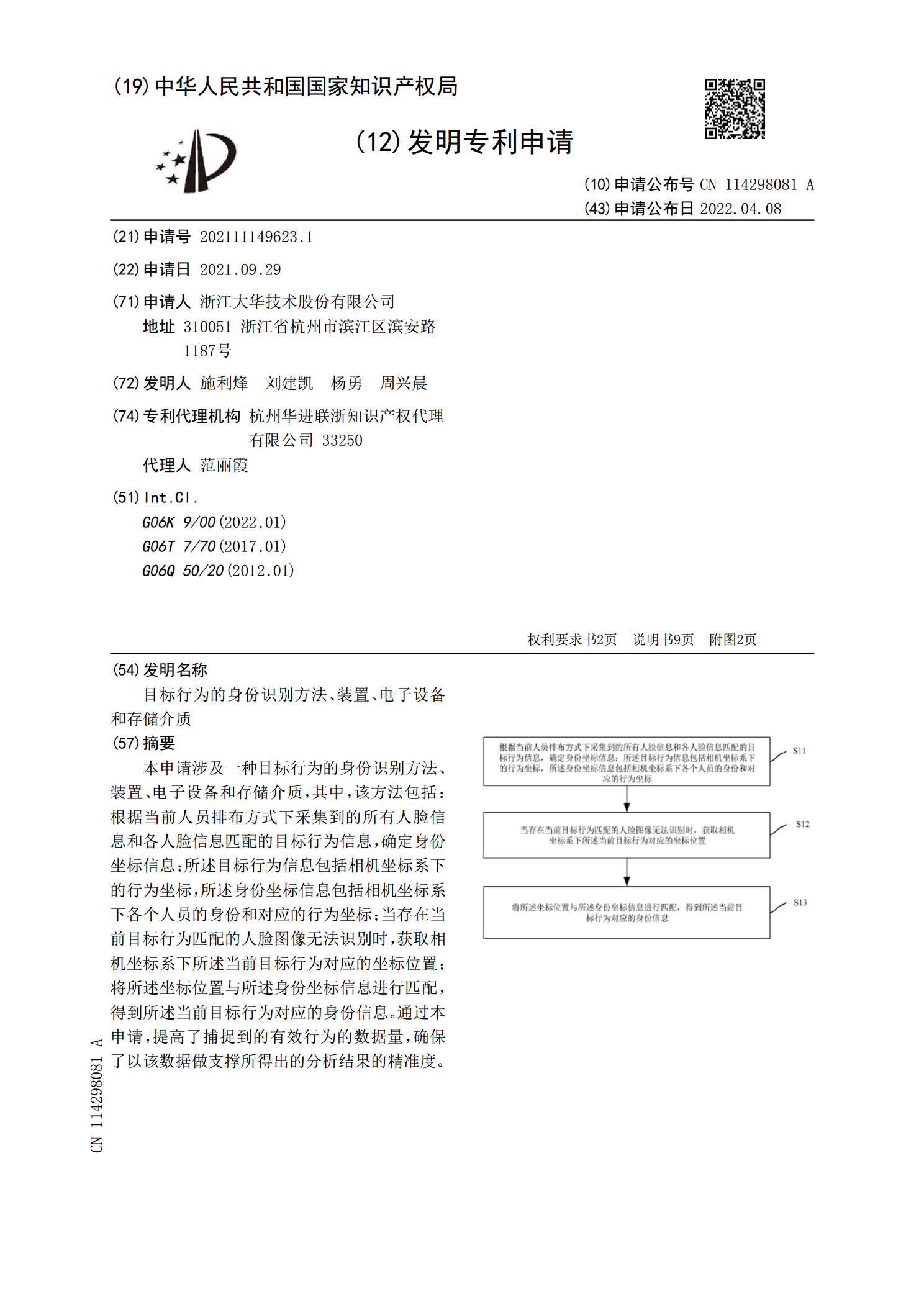
本申请涉及一种目标行为的身份识别方法、装置、电子设备和存储介质,其中,该方法包括:根据当前人员排布方式下采集到的所有人脸信息和各人脸信息匹配的目标行为信息,确定身份坐标信息;所述目标行为信息包括相机坐标系下的行为坐标,所述身份坐标信息包括相机坐标系下各个人员的身份和对应的行为坐标;当存在当前目标行为匹配的人脸图像无法识别时,获取相机坐标系下所述当前目标行为对应的坐标位置;将所述坐标位置与所述身份坐标信息进行匹配,得到所述当前目标行为对应的身份信息。通过本申请,提高了捕捉到的有效行为的数据量,确保了以该数据
交互方法、装置、电子设备和存储介质.pdf
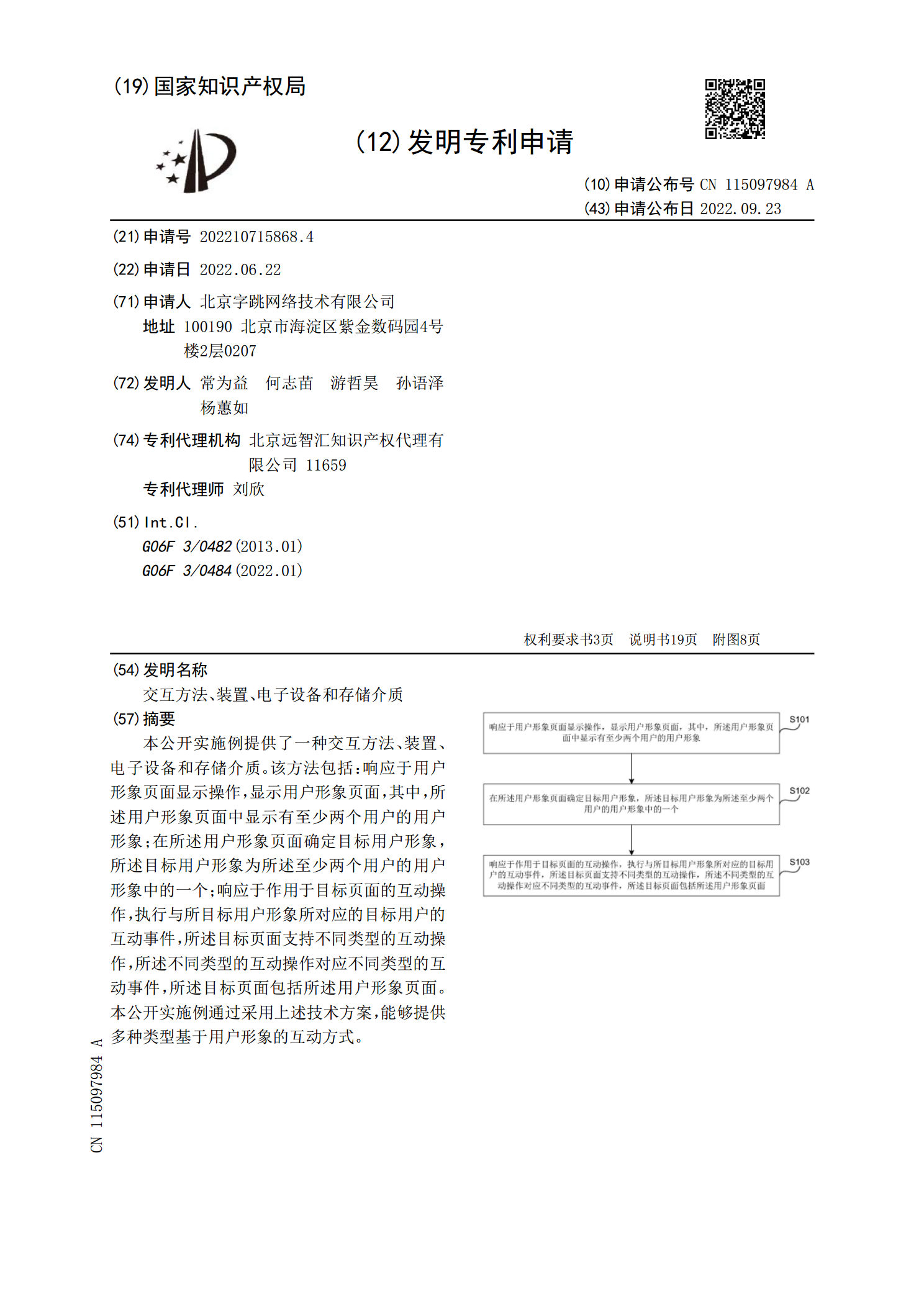
本公开实施例提供了一种交互方法、装置、电子设备和存储介质。该方法包括:响应于用户形象页面显示操作,显示用户形象页面,其中,所述用户形象页面中显示有至少两个用户的用户形象;在所述用户形象页面确定目标用户形象,所述目标用户形象为所述至少两个用户的用户形象中的一个;响应于作用于目标页面的互动操作,执行与所目标用户形象所对应的目标用户的互动事件,所述目标页面支持不同类型的互动操作,所述不同类型的互动操作对应不同类型的互动事件,所述目标页面包括所述用户形象页面。本公开实施例通过采用上述技术方案,能够提供多种类型基于