
一种基于相关滤波的目标跟踪方法及装置.pdf

觅松****哥哥


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于相关滤波的目标跟踪方法及装置.pdf
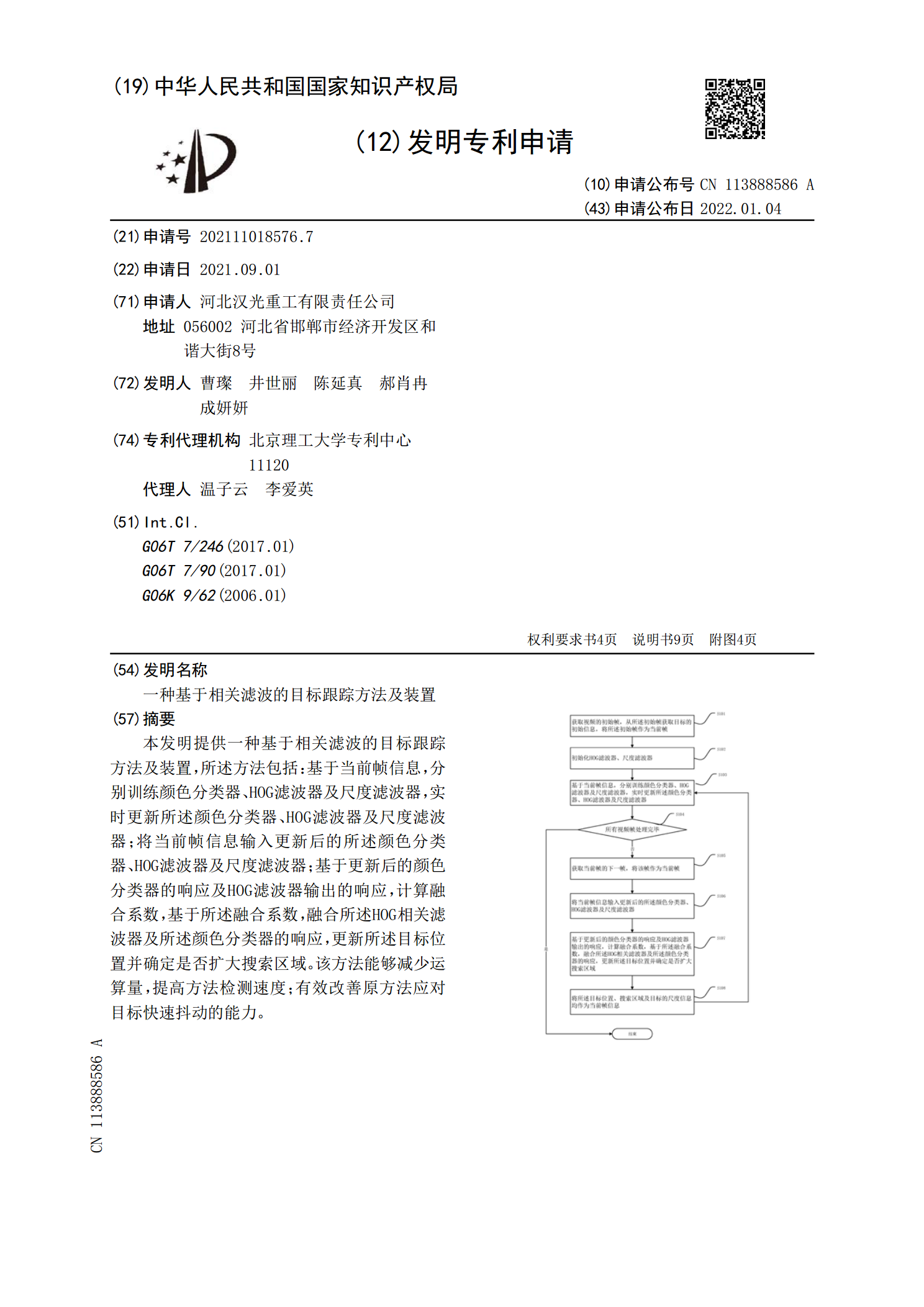
本发明提供一种基于相关滤波的目标跟踪方法及装置,所述方法包括:基于当前帧信息,分别训练颜色分类器、HOG滤波器及尺度滤波器,实时更新所述颜色分类器、HOG滤波器及尺度滤波器;将当前帧信息输入更新后的所述颜色分类器、HOG滤波器及尺度滤波器;基于更新后的颜色分类器的响应及HOG滤波器输出的响应,计算融合系数,基于所述融合系数,融合所述HOG相关滤波器及所述颜色分类器的响应,更新所述目标位置并确定是否扩大搜索区域。该方法能够减少运算量,提高方法检测速度;有效改善原方法应对目标快速抖动的能力。

一种基于目标感知相关滤波的目标跟踪方法.pdf
本发明公开了一种基于目标感知相关滤波的目标跟踪方法,其包括以下步骤:步骤1、构建深度网络特征提取模型;步骤2、确定跟踪目标及标签;步骤3、提取目标深度特征,构建通道选择相关滤波器;步骤4、滤波器逆变换,取实部并全局池化求绝对值,选择L个较大值对应的深度特征构建目标感知相关滤波器模型;步骤5、确定目标搜索区域,提取L个通道特征;步骤6、应用目标感知相关滤波器确定跟踪目标位置及尺度;步骤7、应用线性迭代更新通道选择相关滤波器;步骤8、应用线性迭代更新目标感知相关滤波器;步骤9、循环执行,实现目标连续跟踪。本发

一种基于相关滤波的在线目标跟踪方法.pdf
本发明公开了一种基于相关滤波的在线目标跟踪方法,具有这样的特征,包括以下步骤:步骤1,输入需要跟踪的视频或切分完成的视频帧;步骤2,在需要跟踪的视频或切分完成的视频帧中给定目标位置和大小;步骤3,根据目标位置和大小,完成对于目标的实时在线跟踪,逐帧地保存预测结果。

一种基于多相关滤波器组合的目标跟踪方法.docx
一种基于多相关滤波器组合的目标跟踪方法基于多相关滤波器组合的目标跟踪方法摘要:目标跟踪在计算机视觉领域具有广泛的应用,但仍然面临许多挑战,如遮挡、光照变化和目标形状变化等。为了提高目标跟踪的准确性和鲁棒性,本论文提出了一种基于多相关滤波器组合的目标跟踪方法。该方法通过使用多个相关滤波器,可以有效地利用目标的不同特征,提高跟踪的稳定性和精度。实验结果表明,该方法在处理复杂的目标跟踪问题上具有优越的性能。关键词:目标跟踪,多相关滤波器,特征组合,稳定性,精度1.引言目标跟踪是计算机视觉领域的一项重要研究方向,

一种基于混合核相关滤波的卫星视频目标跟踪方法.pdf
本发明提供一种基于混合核相关滤波的卫星视频目标跟踪方法,其特征在于:采用核相关滤波过程实现卫星视频目标跟踪,并在核特征空间中引入互补的两种特征,其中一个特征是梯度方向直方图HOG,用于检测目标的轮廓和纹理信息,另一个特征是光流OF,用于检测目标的变化像素;通过自适应融合策略,利用两种特征在不同卫星视频中的优势,实现对卫星视频数据集中小目标进行鲁棒且精准的跟踪,能够实现对卫星视频中运动的飞机、列车以及小车等目标进行实时精准的跟踪。