
一种基于全局海鸥算法的移动机器人路径规划方法.pdf

瀚玥****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于全局海鸥算法的移动机器人路径规划方法.pdf
本发明提供一种基于全局海鸥算法的移动机器人路径规划方法,包括以下步骤:获取机器人移动区域地图;根据移动区域地图,建立移动区域地图路径规划的目标函数;基于海鸥算法,通过高斯映射初始化海鸥种群位置;并根据目标函数,计算最优适应度值和最优海鸥位置;通过历史全局最优位置,和本次迭代最优海鸥位置来进行海鸥位置更新;对最优海鸥位置进行透镜反向学习,获取学习后的最优适应度值和最优海鸥位置;并将学习前后适应度值最优的海鸥位置,作为更新后的最优海鸥位置;根据预设的最大迭代次数依次更新的最优海鸥位置,确定最优路径规划结果。该
一种基于改进蚁群算法的全局规划路径方法.pdf
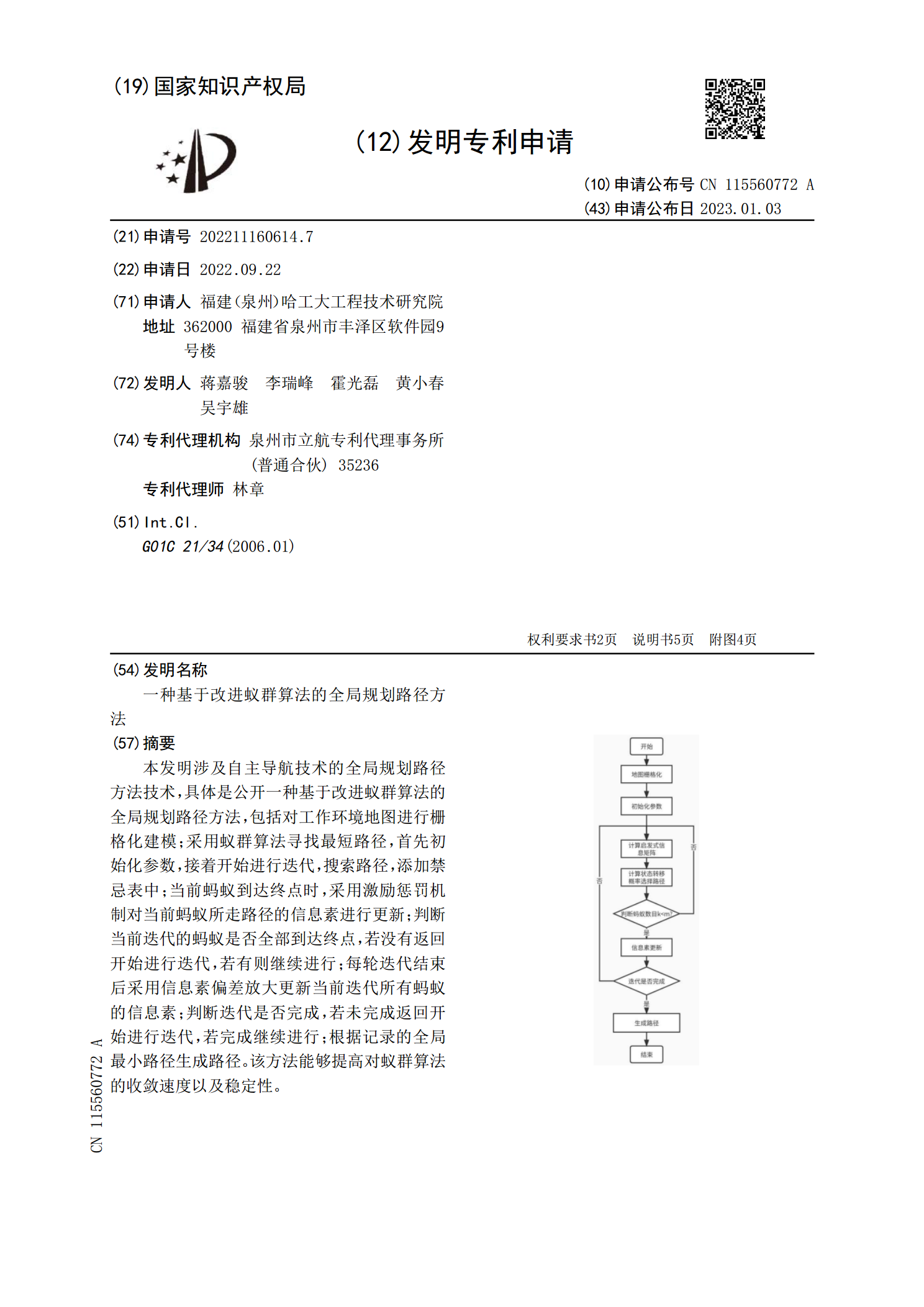
本发明涉及自主导航技术的全局规划路径方法技术,具体是公开一种基于改进蚁群算法的全局规划路径方法,包括对工作环境地图进行栅格化建模;采用蚁群算法寻找最短路径,首先初始化参数,接着开始进行迭代,搜索路径,添加禁忌表中;当前蚂蚁到达终点时,采用激励惩罚机制对当前蚂蚁所走路径的信息素进行更新;判断当前迭代的蚂蚁是否全部到达终点,若没有返回开始进行迭代,若有则继续进行;每轮迭代结束后采用信息素偏差放大更新当前迭代所有蚂蚁的信息素;判断迭代是否完成,若未完成返回开始进行迭代,若完成继续进行;根据记录的全局最小路径生成
一种基于改进A*算法的智能车全局路径规划方法.pdf
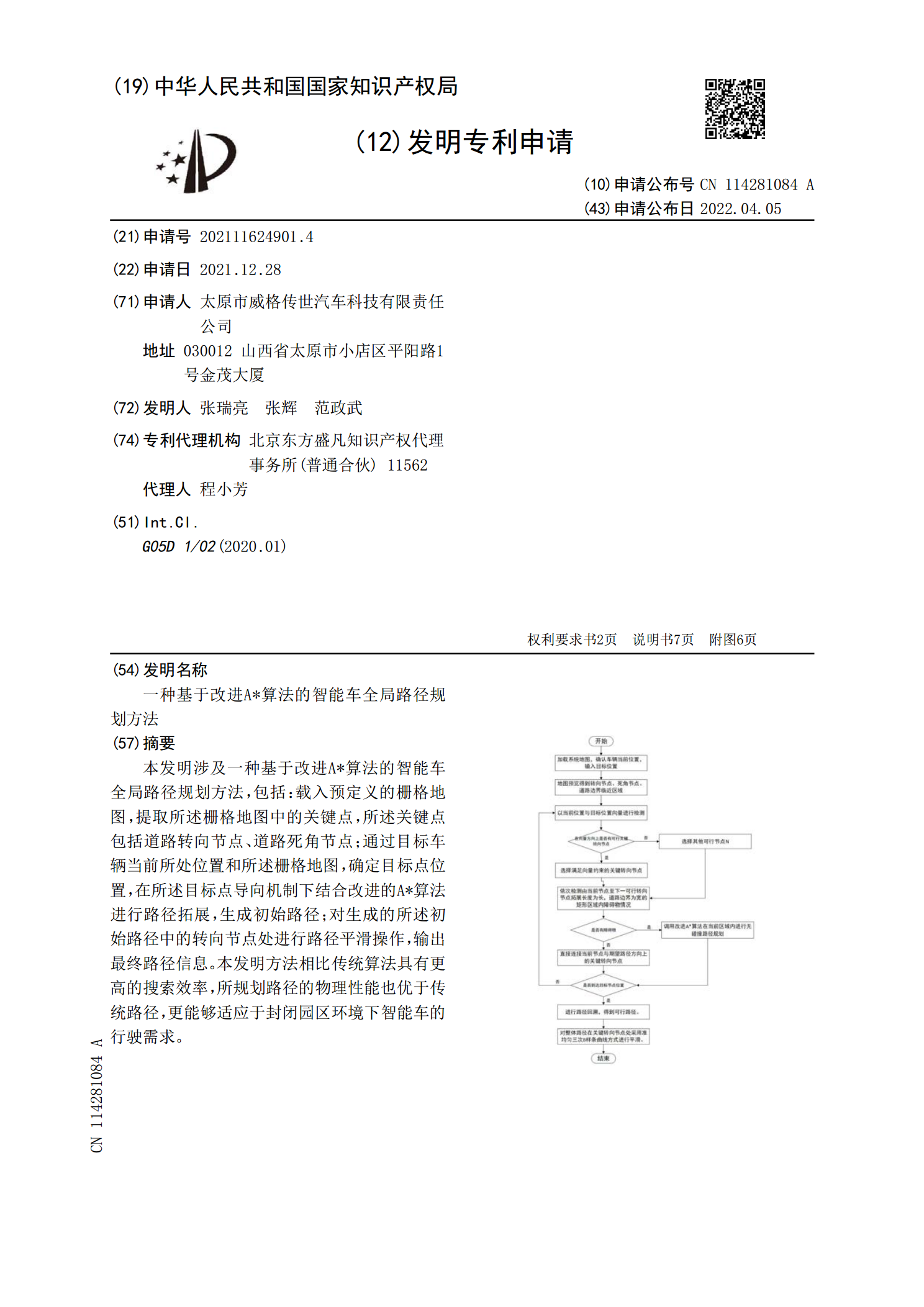
本发明涉及一种基于改进A*算法的智能车全局路径规划方法,包括:载入预定义的栅格地图,提取所述栅格地图中的关键点,所述关键点包括道路转向节点、道路死角节点;通过目标车辆当前所处位置和所述栅格地图,确定目标点位置,在所述目标点导向机制下结合改进的A*算法进行路径拓展,生成初始路径;对生成的所述初始路径中的转向节点处进行路径平滑操作,输出最终路径信息。本发明方法相比传统算法具有更高的搜索效率,所规划路径的物理性能也优于传统路径,更能够适应于封闭园区环境下智能车的行驶需求。

基于电势场法的移动机器人全局路径规划算法.docx
基于电势场法的移动机器人全局路径规划算法基于电势场法的移动机器人全局路径规划算法摘要:移动机器人的全局路径规划是移动机器人领域的一个重要研究课题。本文基于电势场法提出了一种新的移动机器人全局路径规划算法。通过将环境划分为障碍物区域和自由区域,利用电势场法为机器人分配电势场,以实现机器人在复杂环境中安全快速地规划全局路径。关键词:移动机器人,全局路径规划,电势场法1.引言移动机器人的全局路径规划是指在给定起始点和目标点的情况下,规划机器人从起始点到目标点的一条不冲撞的最短路径。全局路径规划对于移动机器人的自

一种基于改进BIT*的移动机器人全局路径规划方法.pdf
本发明公开了一种基于改进BIT*的移动机器人全局路径规划方法。该方法包括:获取环境地图和移动机器人起始点与目标点;以移动机器人起始点为根节点构建BIT*拓展树;通过改进的BIT*算法进行路径规划,生成一条无碰撞可执行路径。该方法通过四方面对BIT*进行改进:1)基于移动机器人尺寸的地图膨胀化,提高生成路径的安全性;2)引入动态自适应步长,提高算法运行效率;3)增加环境信息因子改进估计成本函数,提高算法采样有效率;4)增加二次逆向剪枝函数,减少路径拐点个数。通过仿真分析,验证基于改进BIT*算法的移动机器人