
一种基于改进A*算法的智能车全局路径规划方法.pdf

mm****酱吖


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于改进A*算法的智能车全局路径规划方法.pdf
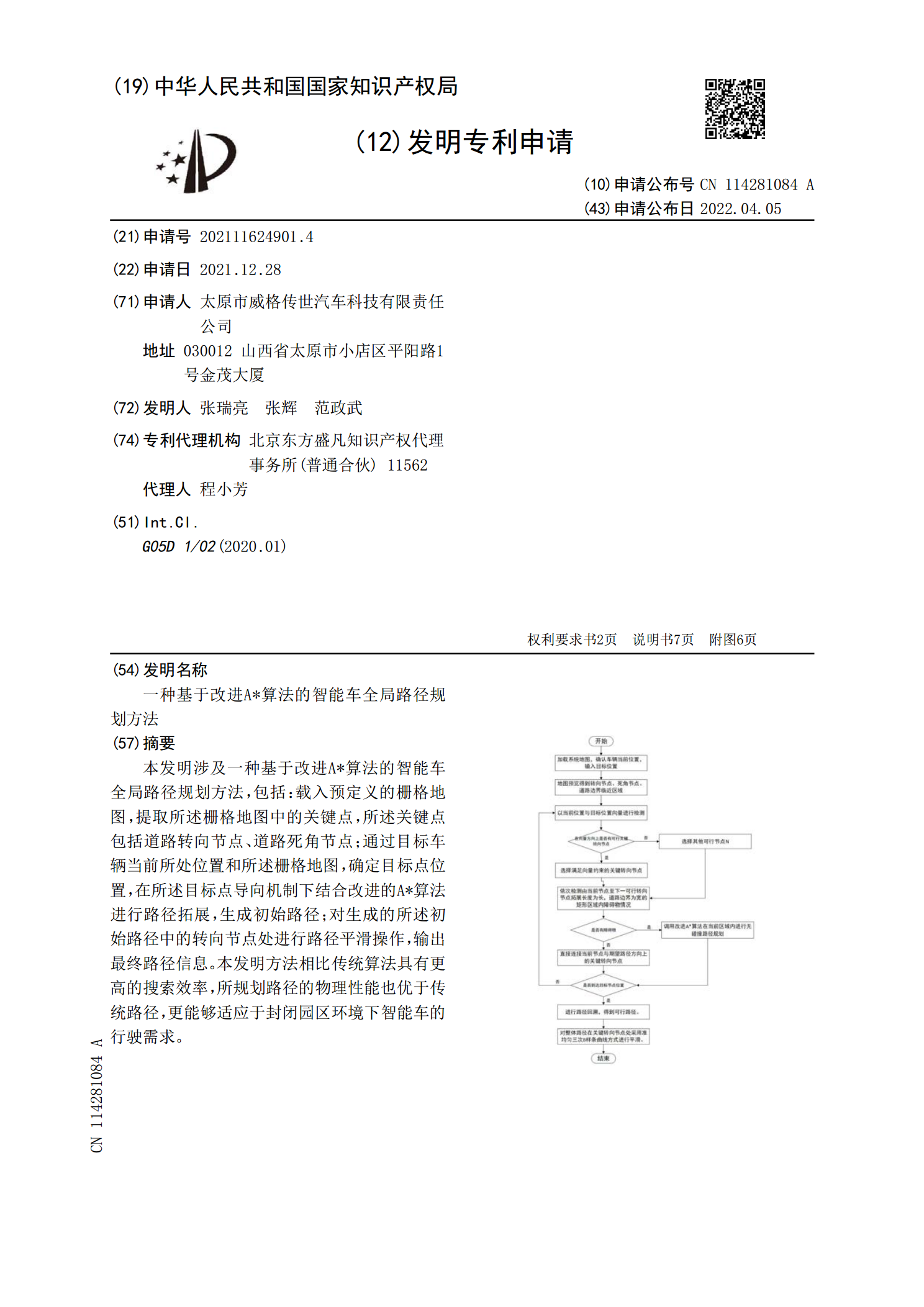
本发明涉及一种基于改进A*算法的智能车全局路径规划方法,包括:载入预定义的栅格地图,提取所述栅格地图中的关键点,所述关键点包括道路转向节点、道路死角节点;通过目标车辆当前所处位置和所述栅格地图,确定目标点位置,在所述目标点导向机制下结合改进的A*算法进行路径拓展,生成初始路径;对生成的所述初始路径中的转向节点处进行路径平滑操作,输出最终路径信息。本发明方法相比传统算法具有更高的搜索效率,所规划路径的物理性能也优于传统路径,更能够适应于封闭园区环境下智能车的行驶需求。
一种基于改进蚁群算法的全局规划路径方法.pdf
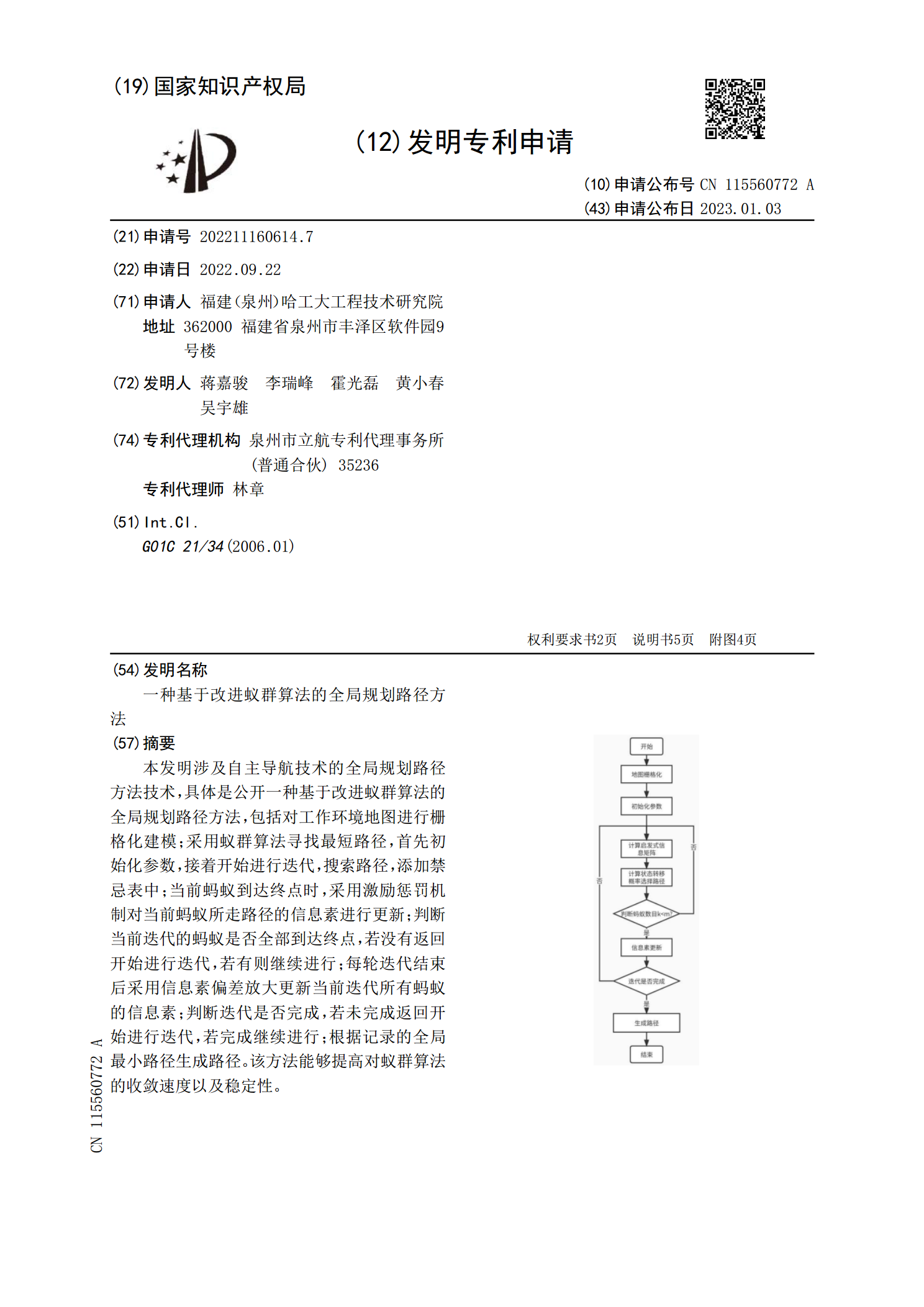
本发明涉及自主导航技术的全局规划路径方法技术,具体是公开一种基于改进蚁群算法的全局规划路径方法,包括对工作环境地图进行栅格化建模;采用蚁群算法寻找最短路径,首先初始化参数,接着开始进行迭代,搜索路径,添加禁忌表中;当前蚂蚁到达终点时,采用激励惩罚机制对当前蚂蚁所走路径的信息素进行更新;判断当前迭代的蚂蚁是否全部到达终点,若没有返回开始进行迭代,若有则继续进行;每轮迭代结束后采用信息素偏差放大更新当前迭代所有蚂蚁的信息素;判断迭代是否完成,若未完成返回开始进行迭代,若完成继续进行;根据记录的全局最小路径生成

基于改进蚁群算法的自动导引运输车全局路径规划方法研究.docx
基于改进蚁群算法的自动导引运输车全局路径规划方法研究基于改进蚁群算法的自动导引运输车全局路径规划方法研究摘要:随着自动导引运输车在物流和工业等领域的广泛应用,全局路径规划成为其关键技术之一。传统的全局路径规划方法如A*算法和Dijkstra算法在规划效率和路径质量方面存在一定的不足。为了解决这一问题,本文提出了一种基于改进蚁群算法的自动导引运输车全局路径规划方法。通过对蚁群算法进行改进,结合自动导引运输车的特点,提高了路径规划的效率和路径质量。实验结果表明,该方法能够有效规划出全局路径,提高自动导引运输车

基于改进A算法的全局动态路径规划研究.docx
基于改进A算法的全局动态路径规划研究I.概要近年来随着全球经济一体化的不断深入,物流系统在各个领域中扮演着越来越重要的角色。然而由于复杂的地理环境、多目标优化和不确定性等因素的影响,传统的全局动态路径规划方法面临着诸多挑战。为了解决这些问题,本文提出了一种基于改进A算法的全局动态路径规划方法。该方法结合了A算法的优势,同时考虑了多目标优化和不确定性因素,以实现更高效、准确的全局动态路径规划。首先本文对传统全局动态路径规划方法进行了简要回顾,分析了其在实际应用中的局限性。然后介绍了改进A算法的基本原理和优势

一种基于改进蚁群算法的机器人全局路径规划方法.pdf
本发明请求保护一种基于改进蚁群算法的机器人全局路径规划的方法,属于移动机器人路径规划领域。该方法包括步骤:S1,机器人根据实际环境地图构建合适的栅格地图;S2,根据机器人构建的地图,对地图进行区域划分;S3,对划分的不同区域进行不均匀分层的初始化信息素浓度的赋值;S4,算法进行迭代,机器人根据不均匀分层的初始信息素浓度进行选择下一个路径节点;S5,算法进行多次迭代,每一次迭代后对算法的启发函数进行重新计算,然后计算选择下一个节点的概率;S6,算法每次迭代后对路径上的信息素浓度进行重新计算。本发明降低了算法