
基于深度学习的品质检测与分拣方法、系统及存储介质.pdf

努力****采萍


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于深度学习的品质检测与分拣方法、系统及存储介质.pdf
本申请提供一种基于深度学习的品质检测与分拣方法、系统及存储介质。其中,基于深度学习的品质检测与分拣方法包括:获取待分拣目标的目标类别、目标图像、当前位置;将目标图像、目标类别输入目标识别模型,得到目标类别对应的待分拣目标的属性特征,属性特征包括品质等级和规格;在当前位置抓取待分拣目标;检测分拣机器人的抓取压力;将抓取压力、目标类别输入神经网络预测模型,得到分拣机器人的控制反馈值;控制反馈值用于表征分拣机器人的抓取压力范围;根据控制反馈值调整抓取压力并根据待分拣目标的属性特征将待分拣目标抓取至对应的分料区。
基于深度学习的缺陷检测方法、系统、装置和存储介质.pdf
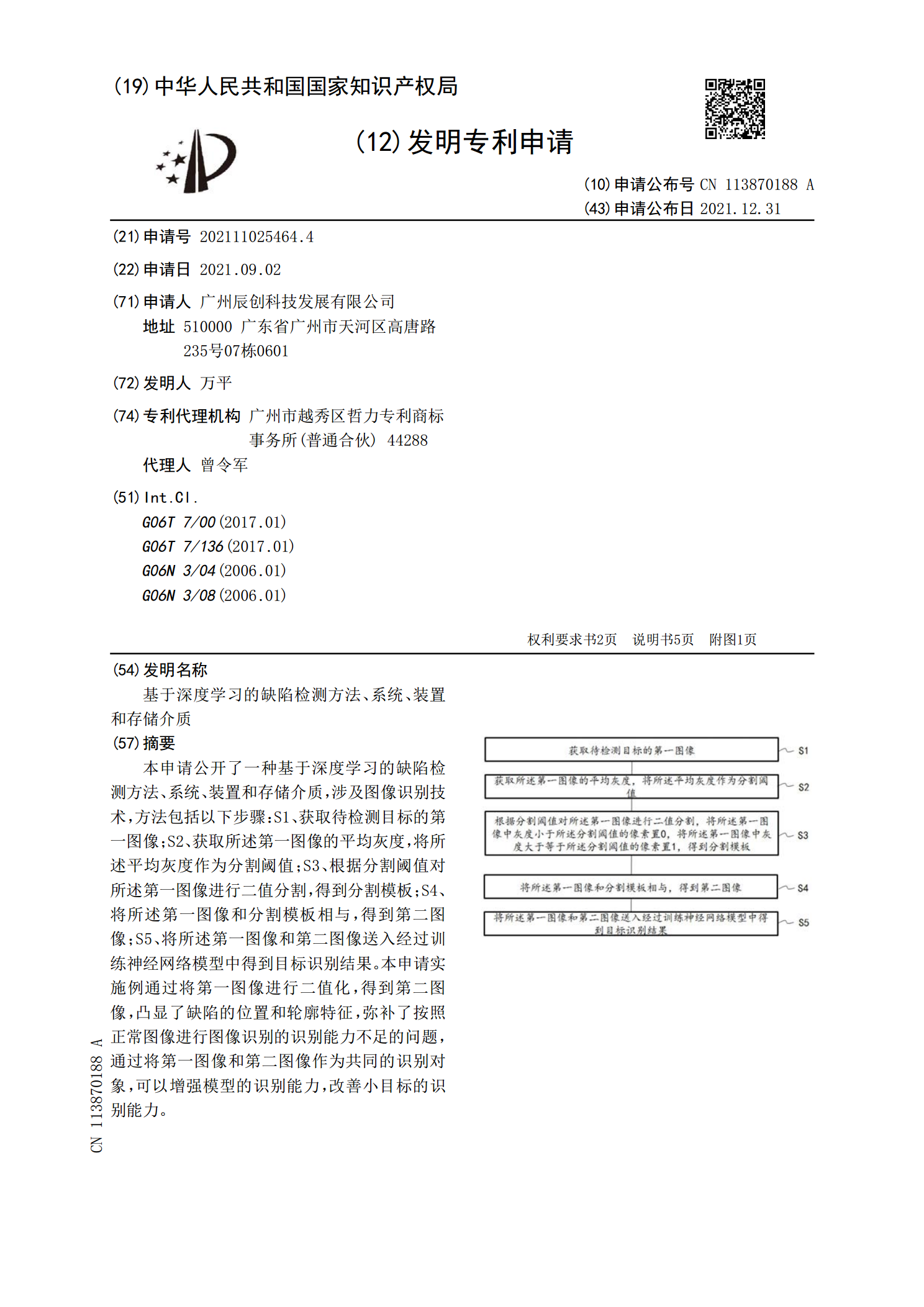
本申请公开了一种基于深度学习的缺陷检测方法、系统、装置和存储介质,涉及图像识别技术,方法包括以下步骤:S1、获取待检测目标的第一图像;S2、获取所述第一图像的平均灰度,将所述平均灰度作为分割阈值;S3、根据分割阈值对所述第一图像进行二值分割,得到分割模板;S4、将所述第一图像和分割模板相与,得到第二图像;S5、将所述第一图像和第二图像送入经过训练神经网络模型中得到目标识别结果。本申请实施例通过将第一图像进行二值化,得到第二图像,凸显了缺陷的位置和轮廓特征,弥补了按照正常图像进行图像识别的识别能力不足的问题
物件分拣系统、方法及存储介质.pdf
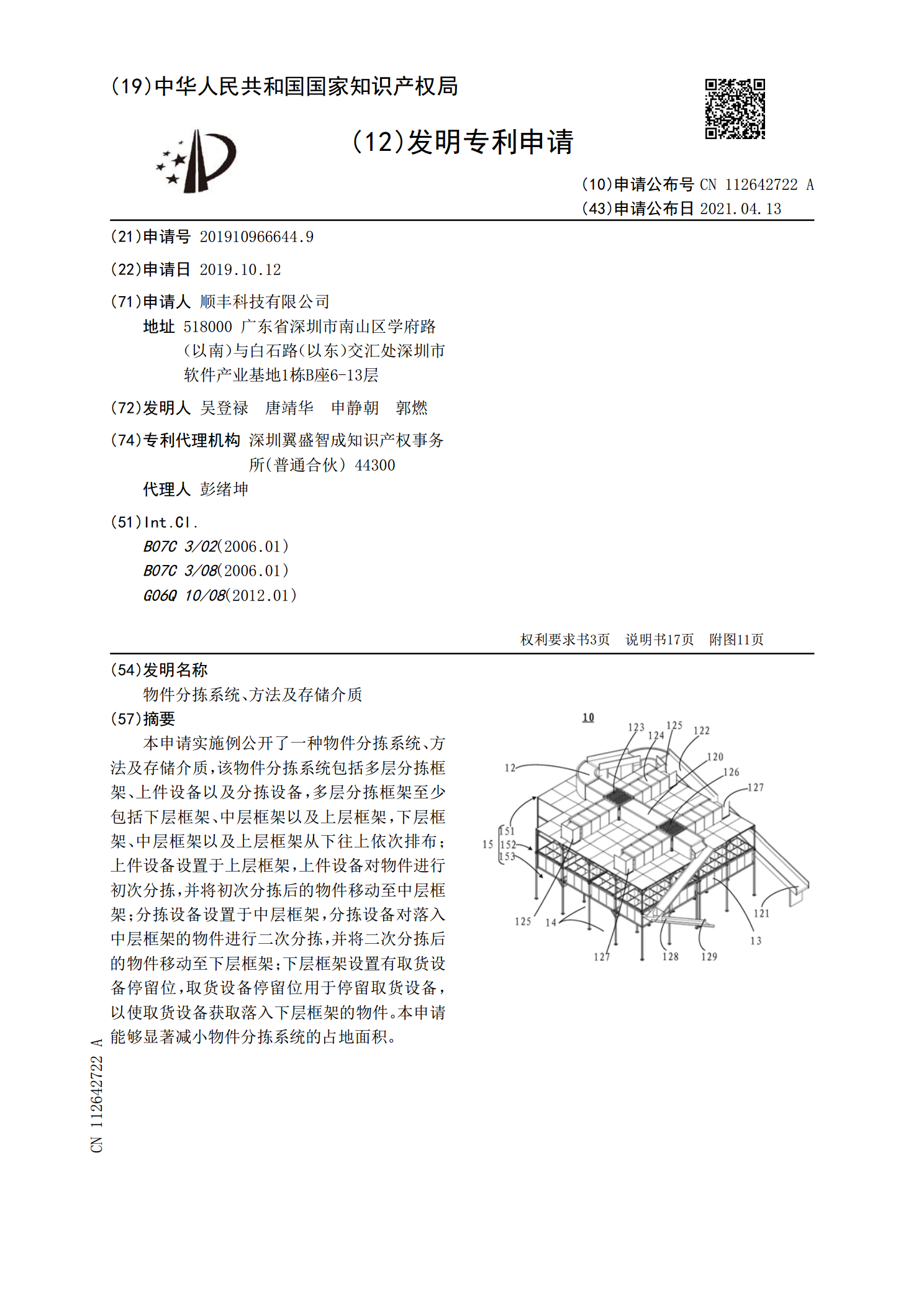
本申请实施例公开了一种物件分拣系统、方法及存储介质,该物件分拣系统包括多层分拣框架、上件设备以及分拣设备,多层分拣框架至少包括下层框架、中层框架以及上层框架,下层框架、中层框架以及上层框架从下往上依次排布;上件设备设置于上层框架,上件设备对物件进行初次分拣,并将初次分拣后的物件移动至中层框架;分拣设备设置于中层框架,分拣设备对落入中层框架的物件进行二次分拣,并将二次分拣后的物件移动至下层框架;下层框架设置有取货设备停留位,取货设备停留位用于停留取货设备,以使取货设备获取落入下层框架的物件。本申请能够显著减
一种基于深度学习的稻谷损伤检测方法、系统及存储介质.pdf
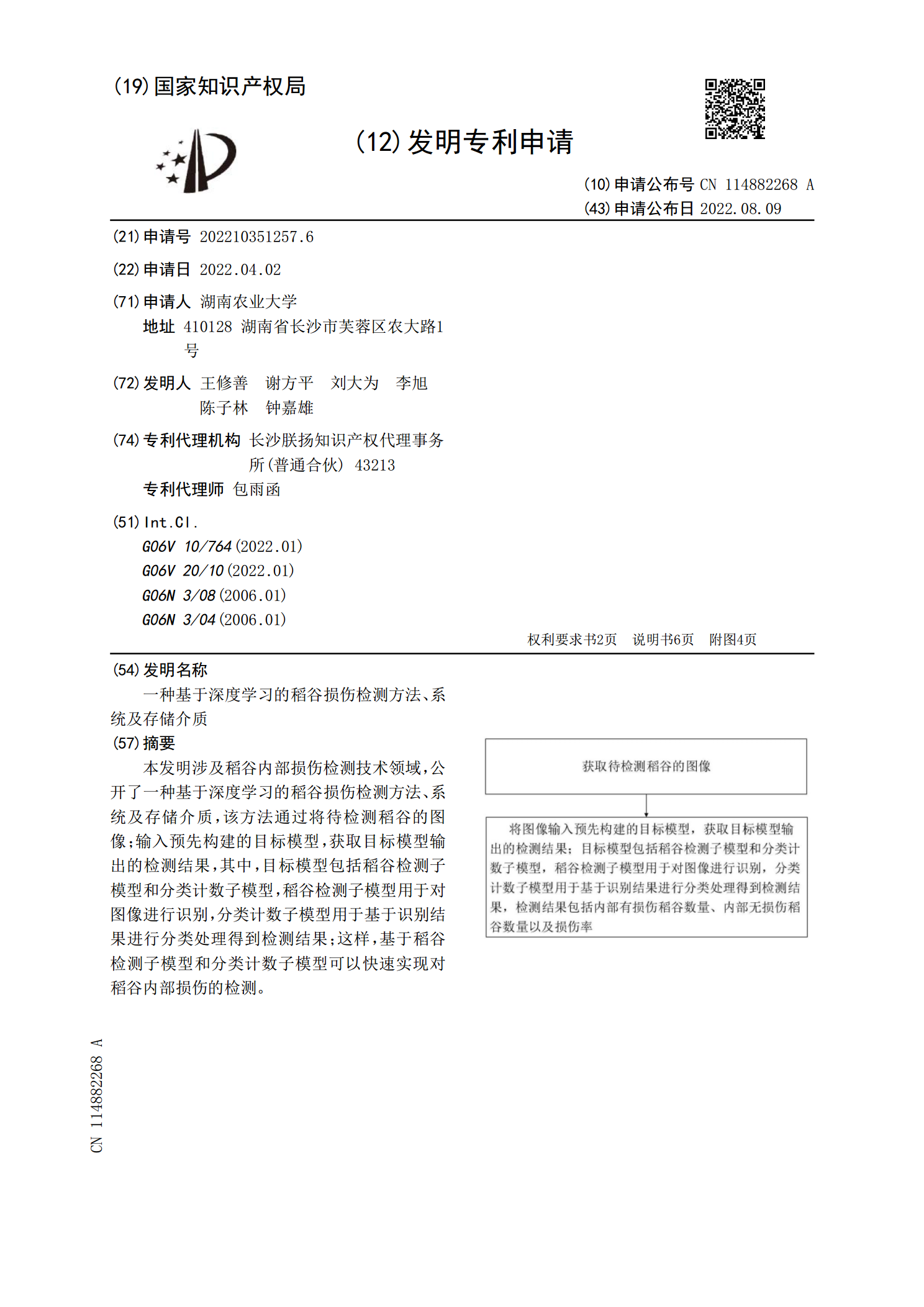
本发明涉及稻谷内部损伤检测技术领域,公开了一种基于深度学习的稻谷损伤检测方法、系统及存储介质,该方法通过将待检测稻谷的图像;输入预先构建的目标模型,获取目标模型输出的检测结果,其中,目标模型包括稻谷检测子模型和分类计数子模型,稻谷检测子模型用于对图像进行识别,分类计数子模型用于基于识别结果进行分类处理得到检测结果;这样,基于稻谷检测子模型和分类计数子模型可以快速实现对稻谷内部损伤的检测。
基于深度学习的印章识别方法、系统及存储介质.pdf
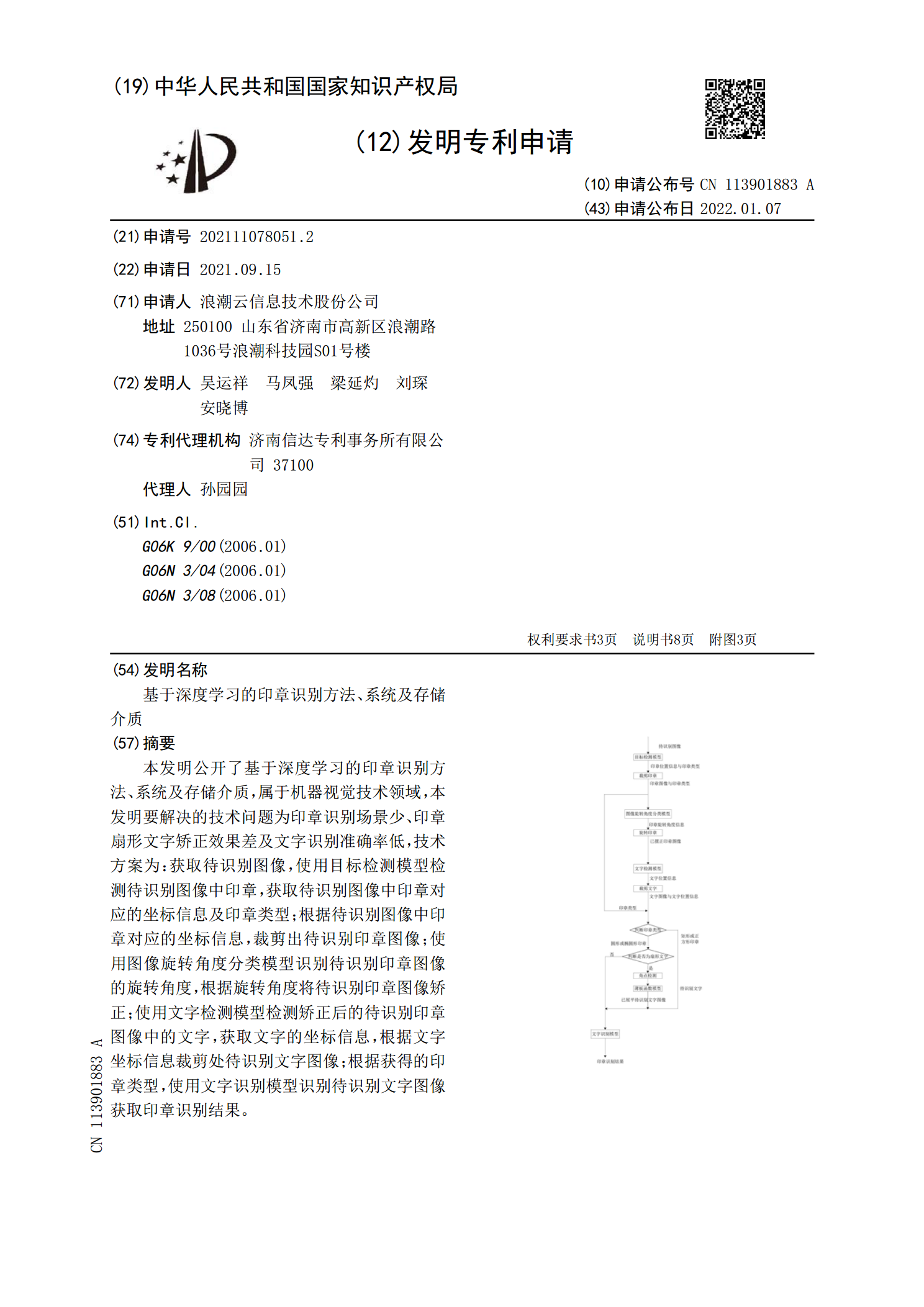
本发明公开了基于深度学习的印章识别方法、系统及存储介质,属于机器视觉技术领域,本发明要解决的技术问题为印章识别场景少、印章扇形文字矫正效果差及文字识别准确率低,技术方案为:获取待识别图像,使用目标检测模型检测待识别图像中印章,获取待识别图像中印章对应的坐标信息及印章类型;根据待识别图像中印章对应的坐标信息,裁剪出待识别印章图像;使用图像旋转角度分类模型识别待识别印章图像的旋转角度,根据旋转角度将待识别印章图像矫正;使用文字检测模型检测矫正后的待识别印章图像中的文字,获取文字的坐标信息,根据文字坐标信息裁剪