
一种无人驾驶车辆队列的轨迹规划方法及跟踪方法.pdf

朋兴****en

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种无人驾驶车辆队列的轨迹规划方法及跟踪方法.pdf
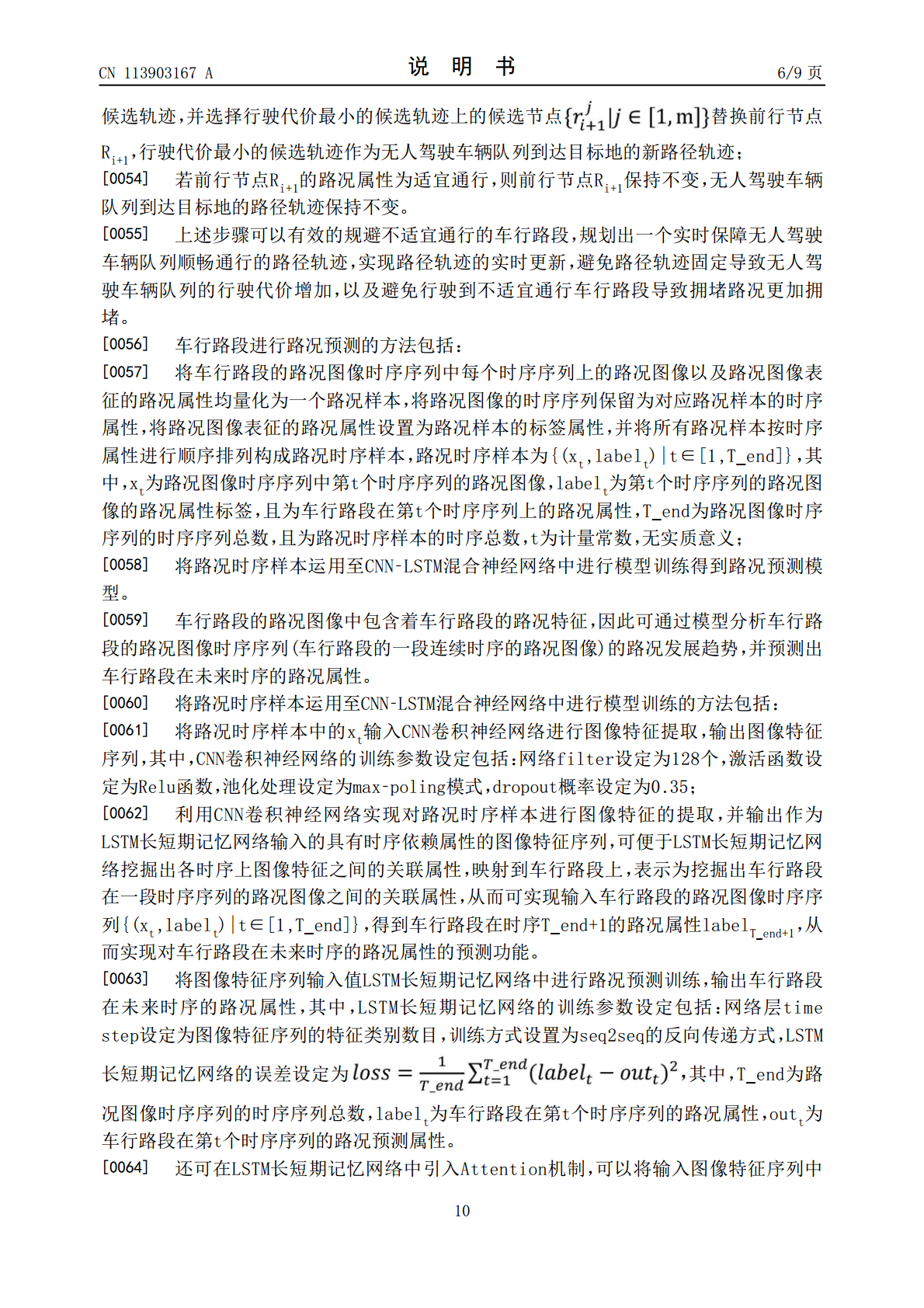
本发明公开了一种无人驾驶车辆队列的轨迹规划方法及跟踪方法,包括以下步骤:步骤S1、利用A*算法规划得到无人驾驶车辆队列从起始地行驶到目标地的路径轨迹;步骤S2、利用CNN‑LSTM混合神经网络对所述路径轨迹的路况属性进行实时预测,并基于路径轨迹的路况属性进行路径轨迹的在线修正。本发明实现随不可通行的路径轨迹的更新,使得无人驾驶车辆队列能够避开不可通行车行路段且能够通畅行驶最终准确到达目标地,避免无人驾驶车辆队列导致不可通行的车行路段更为拥堵,提高无人驾驶车辆队列行驶的安全性和通畅性。
一种用于无人驾驶车辆的轨迹跟踪控制方法.pdf
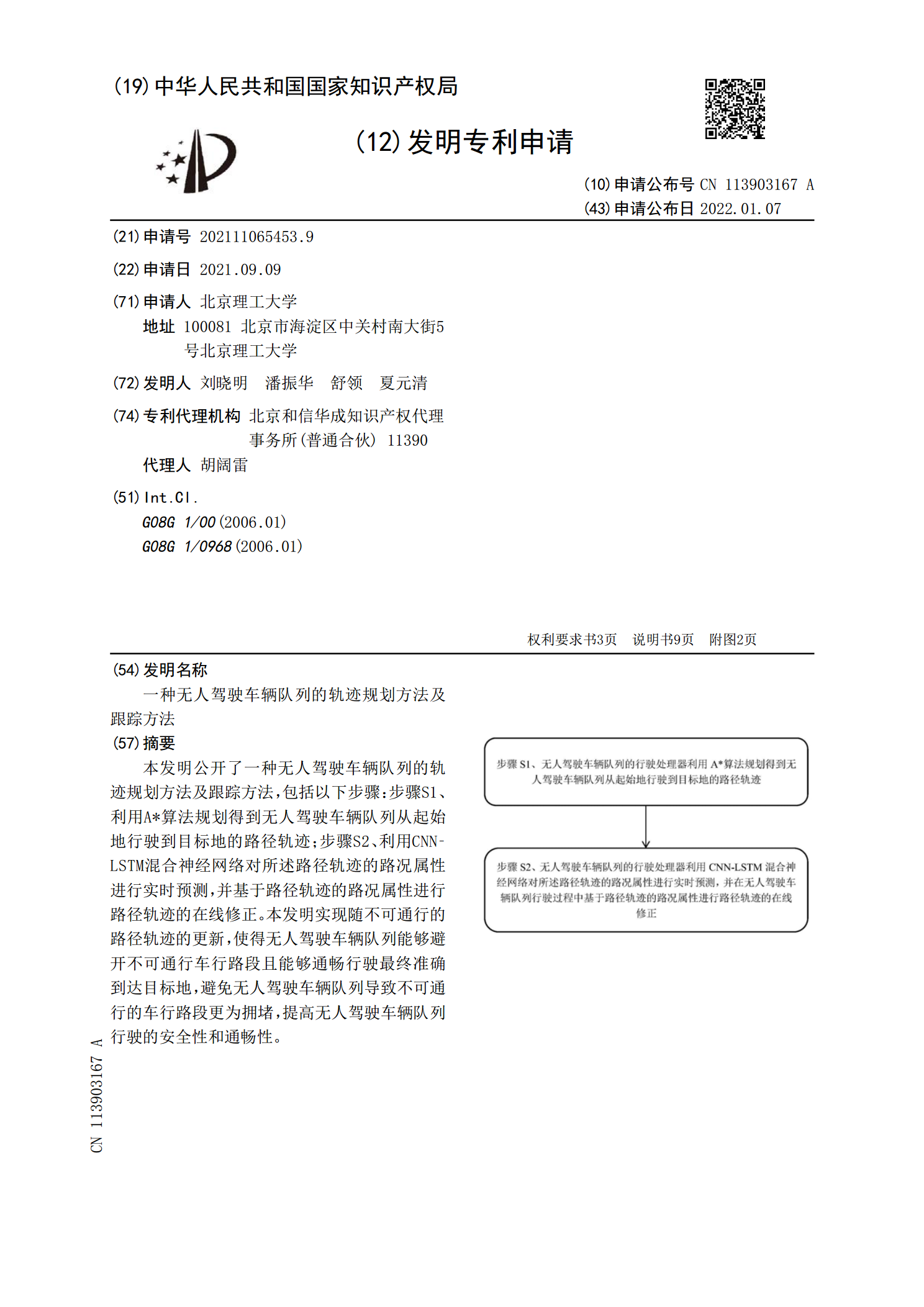
本发明公开了一种用于无人驾驶车辆的轨迹跟踪控制方法,包括如下步骤:根据参考轨迹确定出车身当前的位置点;搜索出距离车辆当前位置点最近的匹配点,依据两点求曲率法得到最近匹配点处的道路曲率;根据车辆当前位置点与最近匹配点计算得到轨迹跟踪偏差,包括横向偏差和头指向误差;建立基于前轮反馈侧偏力的动力学模型,采用LQR控制算法得到最优反馈控制率;确定出前轮侧偏力,基于逆轮胎模型得到前轮侧偏角,进而得到方向盘转角控制量,下发到线控转向系统中实现轨迹跟踪控制。该方法提高了无人驾驶车辆轨迹跟踪控制的稳定性,并提高了轨迹跟踪

无人驾驶车辆实时跟踪行驶轨迹的计算方法.pdf
本发明涉及一种无人驾驶车辆实时跟踪行驶轨迹的计算方法,具体步骤如下:将无人驾驶车辆的非驱动桥左右车轮中心上安装旋转编码器机构,所述旋转编码器机构与计算机的解码器无线连接;标定:保持车辆以10公里/小时的速度匀速直线行驶50米,读取左右编码器脉冲读数CL、CR,计算得车轮在直线行驶时的滚动半径。有益效果:测量出左右车轮角位移,通过车轮滚动半径,可以计算得到左右车轮向前滚动的曲线距离,由于车辆在曲线行驶和直线行驶时,左右车轮滚动距离不同,可以计算获得车辆的航向角和车辆的具体坐标位置。准确地实时测量并计算车辆位
一种四轮独立驱动无人驾驶电动车辆轨迹跟踪控制方法.pdf
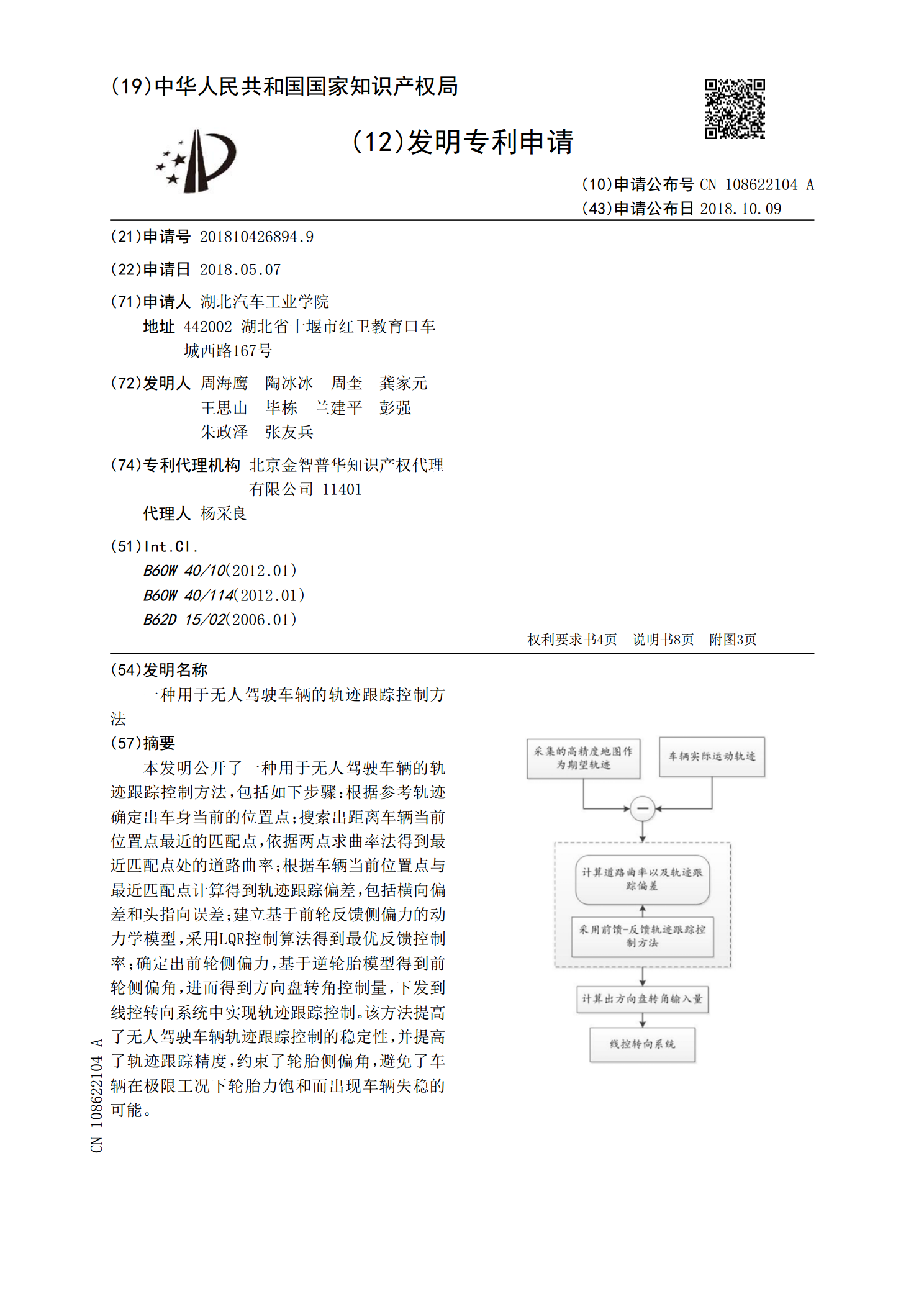
本发明公开了一种四轮独立驱动无人驾驶电动车辆轨迹跟踪控制工作方法,包括以下步骤:建立上层控制器,实现主动转向控制;建立中层控制器,实现车辆横摆稳定性控制;建立下层控制器,控制实际车速能稳定跟踪期望车速。本发明考虑车辆横向稳定性的四轮独立驱动无人驾驶车辆轨迹跟踪方法,通过上层控制器对期望轨迹进行跟踪,中层控制器利用上层控制器规划出的前轮转角对期望横摆角速度进行跟踪,实现了车辆在轨迹跟踪时的稳定性。本发明将车辆动力学约束加入上层控制器,能提高模型精确度和车辆行驶的安全性。上层控制器通过对车辆以及参考轨迹未来时

一种智慧社区车辆轨迹跟踪方法.pdf
本发明公开了一种智慧社区车辆轨迹跟踪方法,通过Vibe+算法对对进入小区内的车辆进行位置跟踪,并获取车辆移动物体在Vibe+算法处理后的二值图中的白色区域的最小外接矩阵的中心点作为车辆的中心,当车辆停在某地不动时,则该车辆在摄像头下的Vibe+处理后的二值图中白色区域逐渐消失,当白色区域面积小于初始车辆进入小区移动过程的最大面积的80%,则将该车重心点标记为该车此刻停留的坐标位置,从而对车辆进行跟踪。本发明的一种智慧社区车辆轨迹跟踪方法可以将小区内的车辆移动情况和车位占用情况,数字化处理,及时跟踪和处理。