
雷达辅助驾驶系统和方法.pdf

文宣****66


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

雷达辅助驾驶系统和方法.pdf
本发明提供了雷达辅助驾驶系统和方法,包括仪表、控制器和雷达,雷达和控制器分别与仪表相连接;控制器用于采集当前车辆的绝对车速,并将绝对车速发送给仪表;仪表用于将绝对车速发送给雷达;雷达用于接收仪表发送的绝对车速;并采集目标对象的速度和当前车辆与目标对象的距离,根据绝对车速、目标对象的速度和距离,得到碰撞时间;根据碰撞时间与绝对车速的关系确定目标对象类别,根据目标对象类别向仪表发送功能标志位;仪表用于根据功能标志位进行紧急减速或报警;根据碰撞时间与绝对车速的关系,确定目标对象的类别,从而对路况信息进行精准判断

基于激光雷达的辅助驾驶系统及方法.pdf
本发明公开了一种基于激光雷达的辅助驾驶系统及方法,本发明基于激光雷达的辅助驾驶系统通过雷达传感器对预设范围内的路况进行图像信息采集,并将采集的路况图像发送至雷达控制器;雷达控制器接收路况图像并采用HSL调色方式对路况图像所包含的图像元素进行明度调节获得待整合图像,然后将待整合图像发送至车载娱乐主机;车载娱乐主机读取本地预存的车模俯视图,将待整合图像与车模俯视图进行整合,并对整合后的图像进行显示。本发明通过对当前路况中的物体按照不同的HSL调色方式进行区别显示,使得驾驶员在复杂路段时能够直观的查看复杂路面中
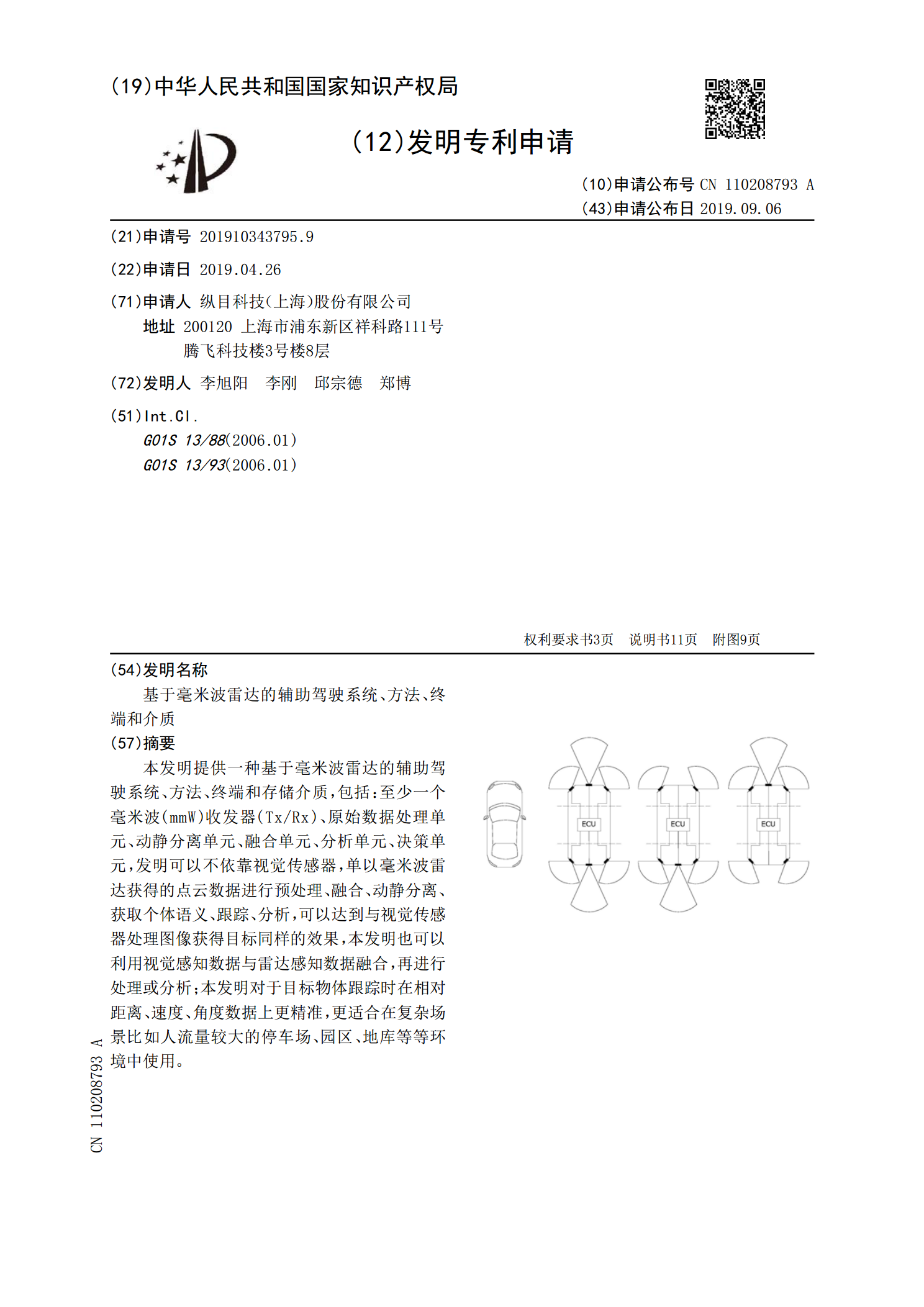
基于毫米波雷达的辅助驾驶系统、方法、终端和介质.pdf
本发明提供一种基于毫米波雷达的辅助驾驶系统、方法、终端和存储介质,包括:至少一个毫米波(mmW)收发器(Tx/Rx)、原始数据处理单元、动静分离单元、融合单元、分析单元、决策单元,发明可以不依靠视觉传感器,单以毫米波雷达获得的点云数据进行预处理、融合、动静分离、获取个体语义、跟踪、分析,可以达到与视觉传感器处理图像获得目标同样的效果,本发明也可以利用视觉感知数据与雷达感知数据融合,再进行处理或分析;本发明对于目标物体跟踪时在相对距离、速度、角度数据上更精准,更适合在复杂场景比如人流量较大的停车场、园区、地
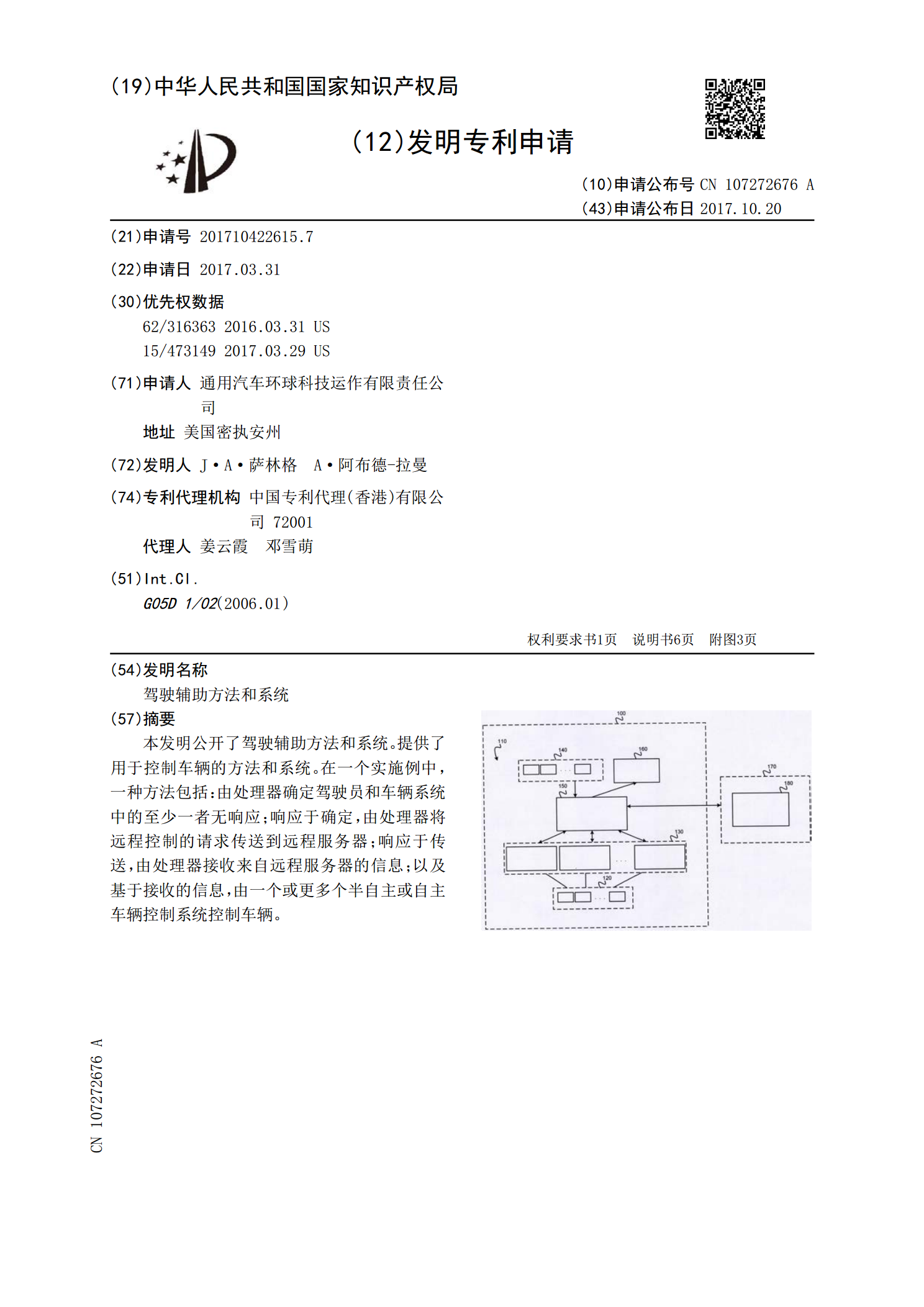
驾驶辅助方法和系统.pdf
本发明公开了驾驶辅助方法和系统。提供了用于控制车辆的方法和系统。在一个实施例中,一种方法包括:由处理器确定驾驶员和车辆系统中的至少一者无响应;响应于确定,由处理器将远程控制的请求传送到远程服务器;响应于传送,由处理器接收来自远程服务器的信息;以及基于接收的信息,由一个或更多个半自主或自主车辆控制系统控制车辆。

驾驶辅助系统和方法.pdf
本发明涉及驾驶辅助系统,驾驶辅助系统包括:图像获取装置,图像获取装置获取沿途的交通标识的图像;处理装置,处理装置查找以驾驶员选定的语言对图像获取装置获取的交通标识的含义进行解释的语音信息或视频信息;播放装置,播放装置在车内播放处理装置查找到的语音信息或视频信息。本发明还涉及驾驶辅助方法。本发明中,通过以驾驶员选定的语言对沿途的交通标识的含义进行解释,从而使得驾驶员能够迅速获知交通标识的含义,以利于安全和规范驾驶。