
标定路侧设备的方法、系统、路侧设备及标定车辆.pdf

是秋****写意

1/10
2/10

3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

标定路侧设备的方法、系统、路侧设备及标定车辆.pdf
本申请提供了一种标定路侧设备的方法、系统、路侧设备及标定车辆,适用于辅助驾驶技术领域,该方法包括:标定车辆获取地理位置信息,并通过车载通信单元向路侧设备发送该地理位置信息;路侧设备在接收到该地理位置信息时,获取目标图像,该目标图像中包含标定车辆,目标图像为路侧设备的摄像头采集的;路侧设备根据地理位置信息与标定车辆在所述目标图像中的位置信息的对应关系,标定该摄像头;通过本申请实施例,可以提高标定路侧设备的效率及标定过程中的安全性。

路侧感知系统的相机与毫米波雷达联合标定方法及系统.pdf
本发明提供了一种路侧感知系统的相机与毫米波雷达联合标定方法及系统,所述方法包括如下步骤:步骤S1:建立GPS到世界坐标系投影;步骤S2:对世界坐标进行相机标定;步骤S3:对雷达到世界坐标系进行标定;步骤S4:对世界坐标到GPS坐标进行转换。本发明通过GPS近似投影建立世界坐标系,具体实施可借助于高精度RTK设备,提高了测量精度及操作便捷性;实现雷达坐标、像素坐标、GPS坐标的相互转换,方便路侧感知系统直接输出检测目标的GPS坐标;引入GPS高程信息可针对平直路面以及坡度路面进行标定,相机、雷达安装位置及角
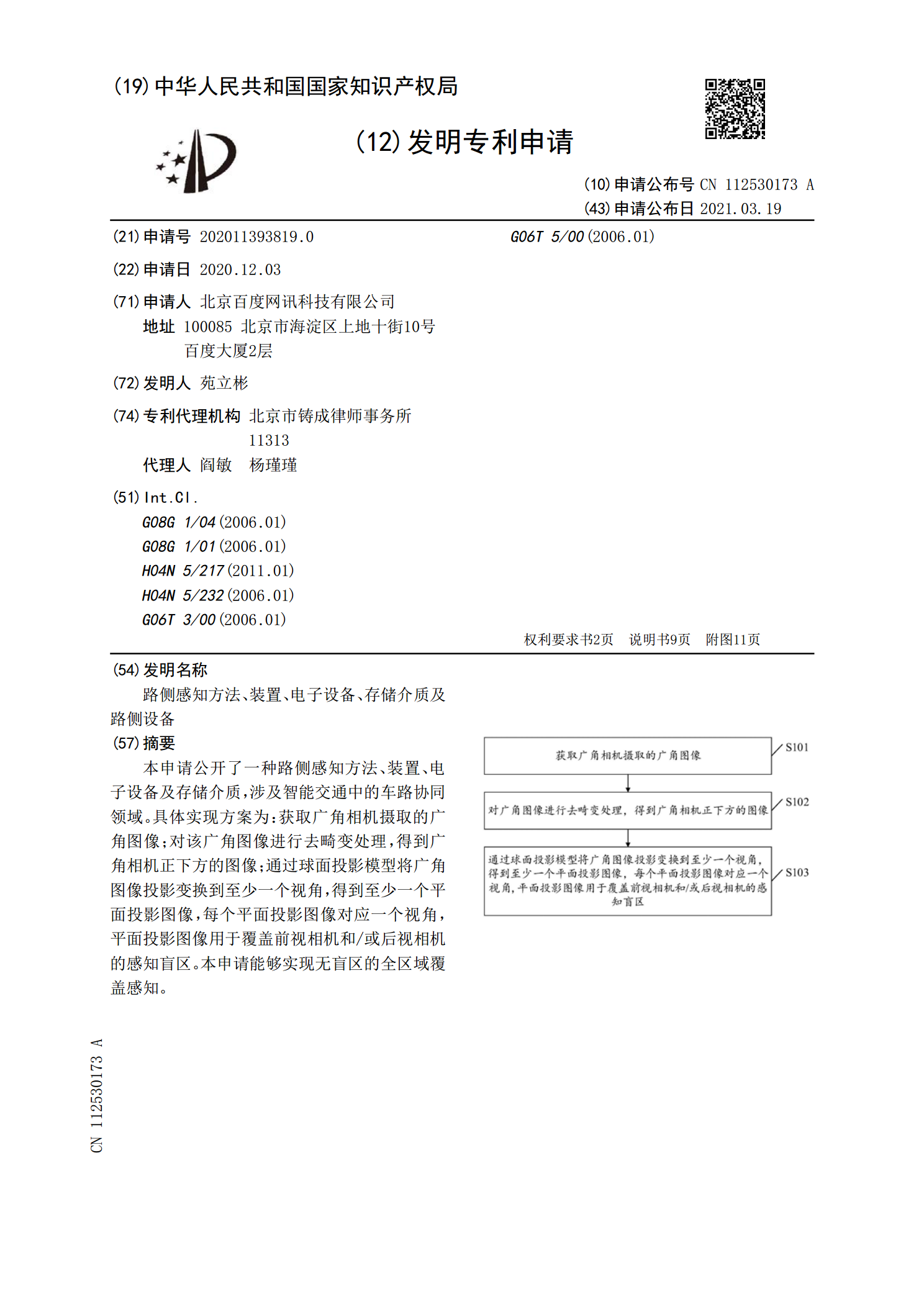
路侧感知方法、装置、电子设备、存储介质及路侧设备.pdf
本申请公开了一种路侧感知方法、装置、电子设备及存储介质,涉及智能交通中的车路协同领域。具体实现方案为:获取广角相机摄取的广角图像;对该广角图像进行去畸变处理,得到广角相机正下方的图像;通过球面投影模型将广角图像投影变换到至少一个视角,得到至少一个平面投影图像,每个平面投影图像对应一个视角,平面投影图像用于覆盖前视相机和/或后视相机的感知盲区。本申请能够实现无盲区的全区域覆盖感知。
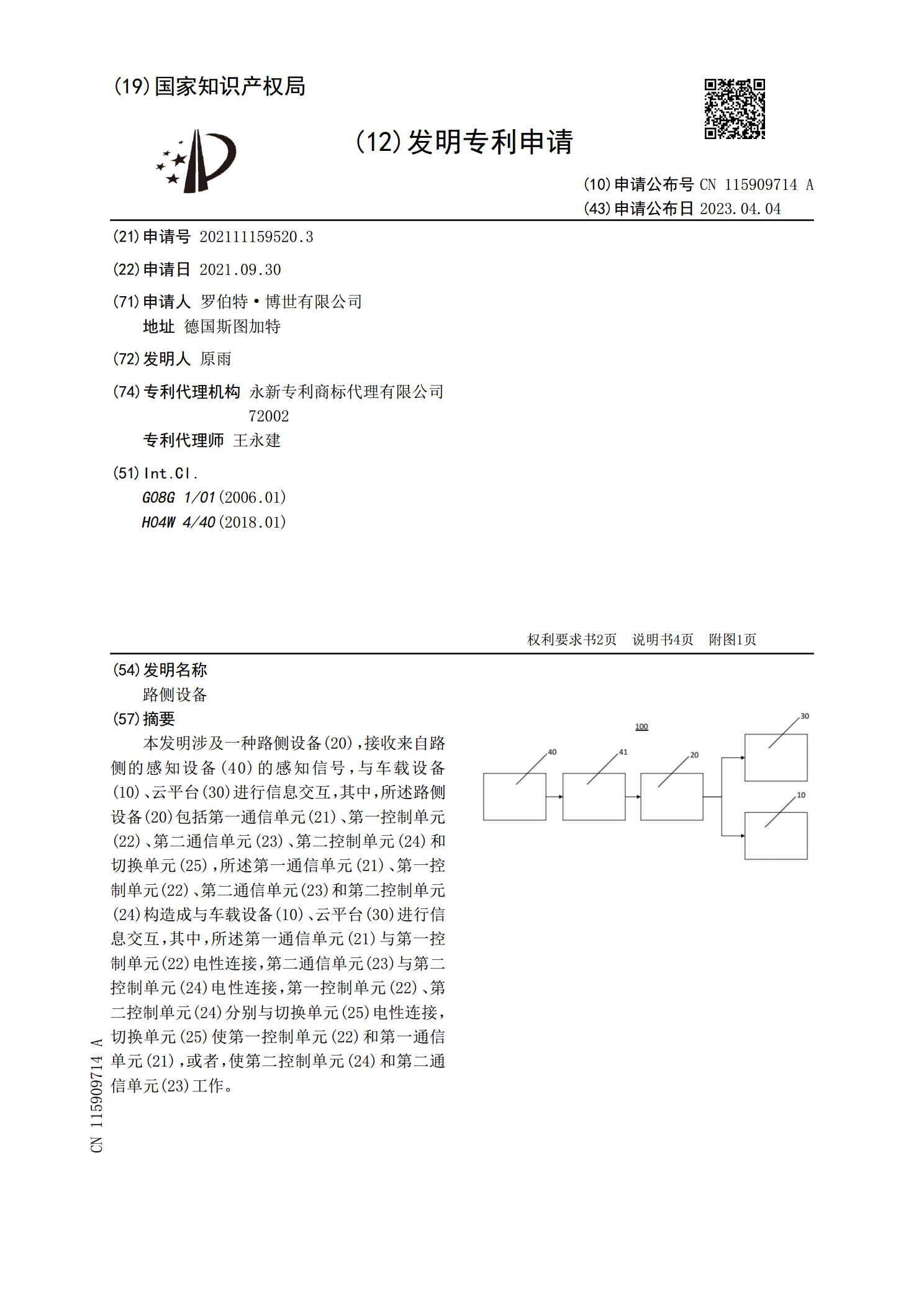
路侧设备.pdf
本发明涉及一种路侧设备(20),接收来自路侧的感知设备(40)的感知信号,与车载设备(10)、云平台(30)进行信息交互,其中,所述路侧设备(20)包括第一通信单元(21)、第一控制单元(22)、第二通信单元(23)、第二控制单元(24)和切换单元(25),所述第一通信单元(21)、第一控制单元(22)、第二通信单元(23)和第二控制单元(24)构造成与车载设备(10)、云平台(30)进行信息交互,其中,所述第一通信单元(21)与第一控制单元(22)电性连接,第二通信单元(23)与第二控制单元(24)电性
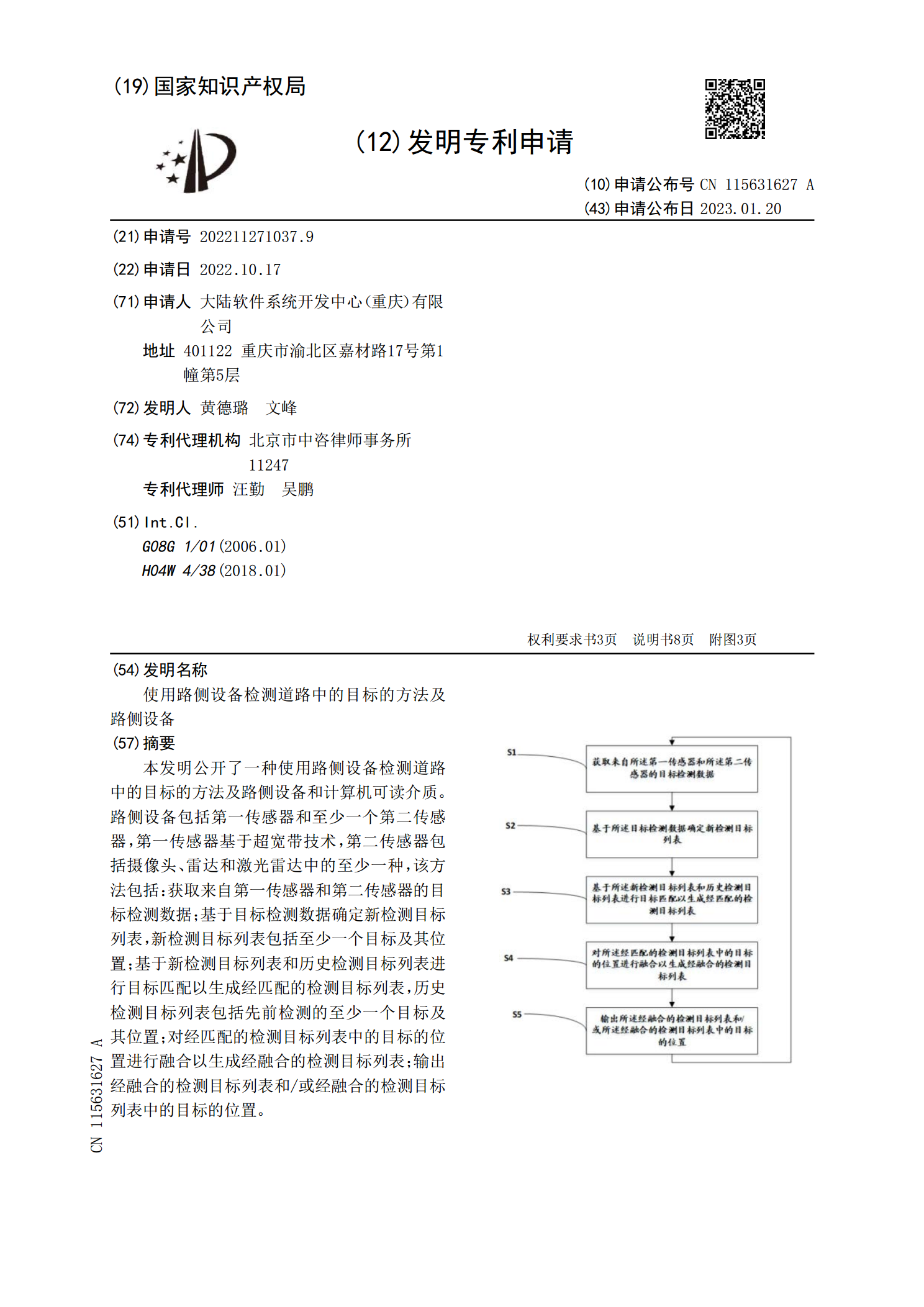
使用路侧设备检测道路中的目标的方法及路侧设备.pdf
本发明公开了一种使用路侧设备检测道路中的目标的方法及路侧设备和计算机可读介质。路侧设备包括第一传感器和至少一个第二传感器,第一传感器基于超宽带技术,第二传感器包括摄像头、雷达和激光雷达中的至少一种,该方法包括:获取来自第一传感器和第二传感器的目标检测数据;基于目标检测数据确定新检测目标列表,新检测目标列表包括至少一个目标及其位置;基于新检测目标列表和历史检测目标列表进行目标匹配以生成经匹配的检测目标列表,历史检测目标列表包括先前检测的至少一个目标及其位置;对经匹配的检测目标列表中的目标的位置进行融合以生成