
路侧感知方法、装置、电子设备、存储介质及路侧设备.pdf

瀚玥****魔王

1/10

2/10
3/10

4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
路侧感知方法、装置、电子设备、存储介质及路侧设备.pdf
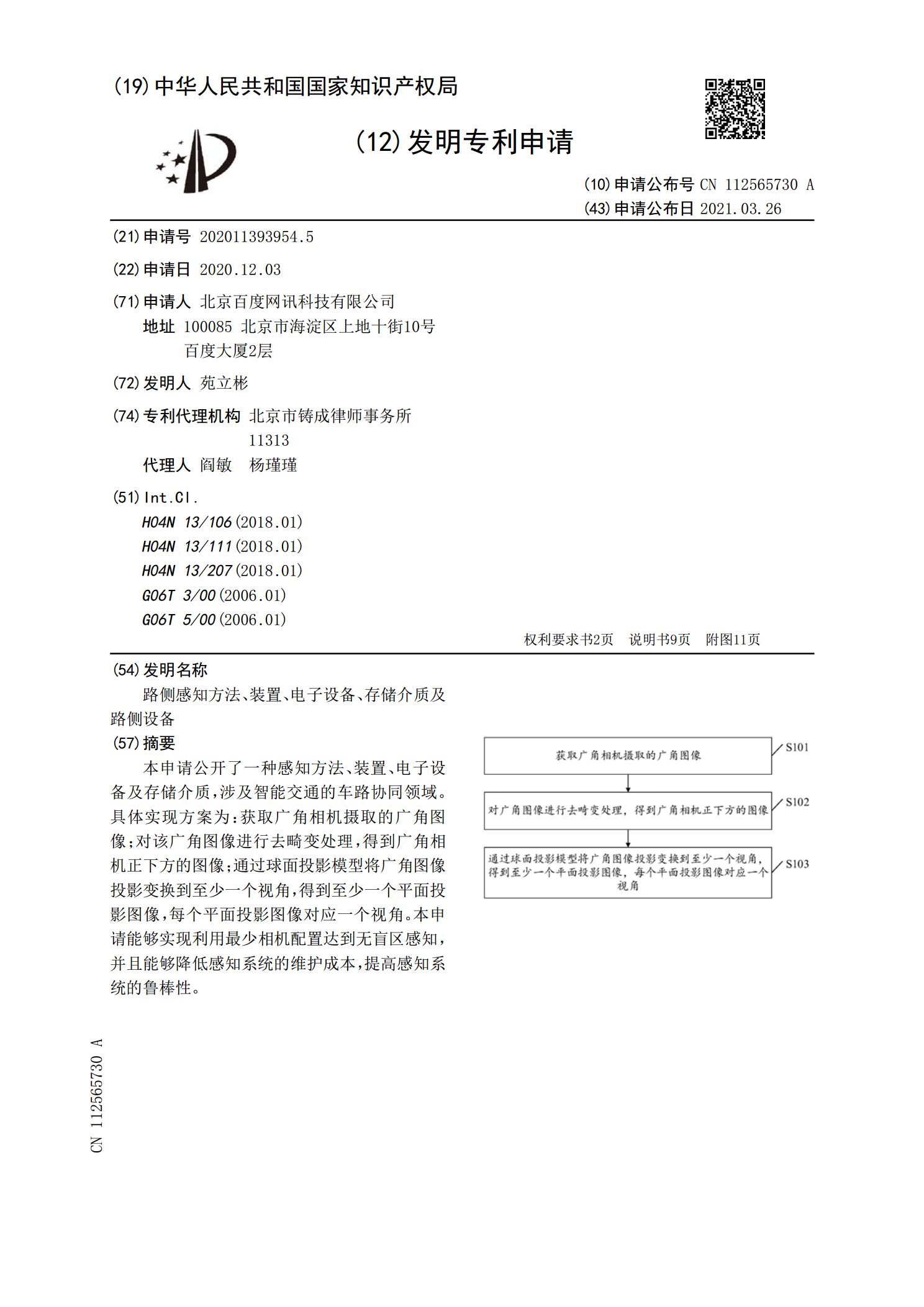
本申请公开了一种感知方法、装置、电子设备及存储介质,涉及智能交通的车路协同领域。具体实现方案为:获取广角相机摄取的广角图像;对该广角图像进行去畸变处理,得到广角相机正下方的图像;通过球面投影模型将广角图像投影变换到至少一个视角,得到至少一个平面投影图像,每个平面投影图像对应一个视角。本申请能够实现利用最少相机配置达到无盲区感知,并且能够降低感知系统的维护成本,提高感知系统的鲁棒性。
路侧感知方法、装置、电子设备、存储介质及路侧设备.pdf
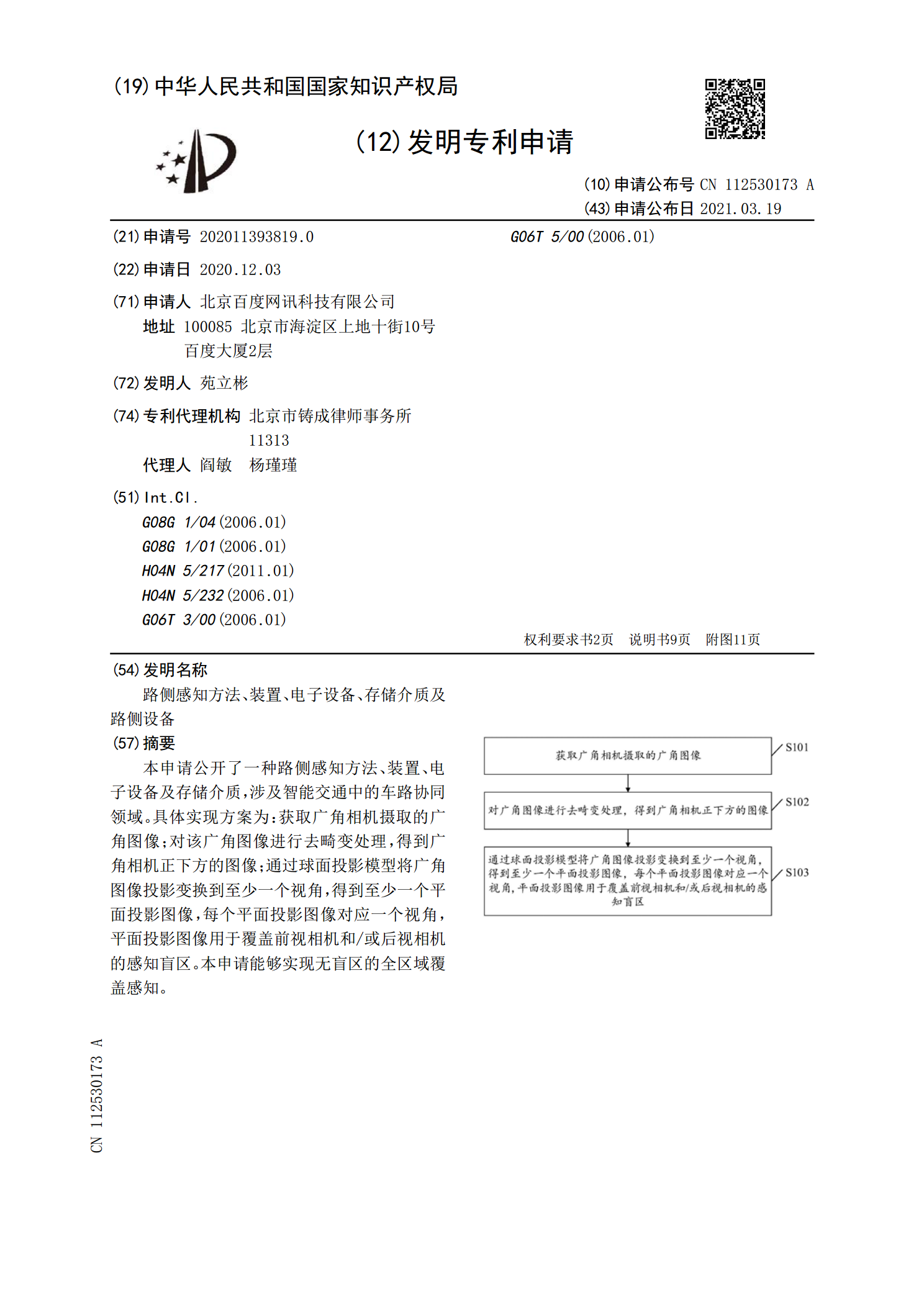
本申请公开了一种路侧感知方法、装置、电子设备及存储介质,涉及智能交通中的车路协同领域。具体实现方案为:获取广角相机摄取的广角图像;对该广角图像进行去畸变处理,得到广角相机正下方的图像;通过球面投影模型将广角图像投影变换到至少一个视角,得到至少一个平面投影图像,每个平面投影图像对应一个视角,平面投影图像用于覆盖前视相机和/或后视相机的感知盲区。本申请能够实现无盲区的全区域覆盖感知。
路侧设备数据处理方法、装置及电子设备、存储介质.pdf
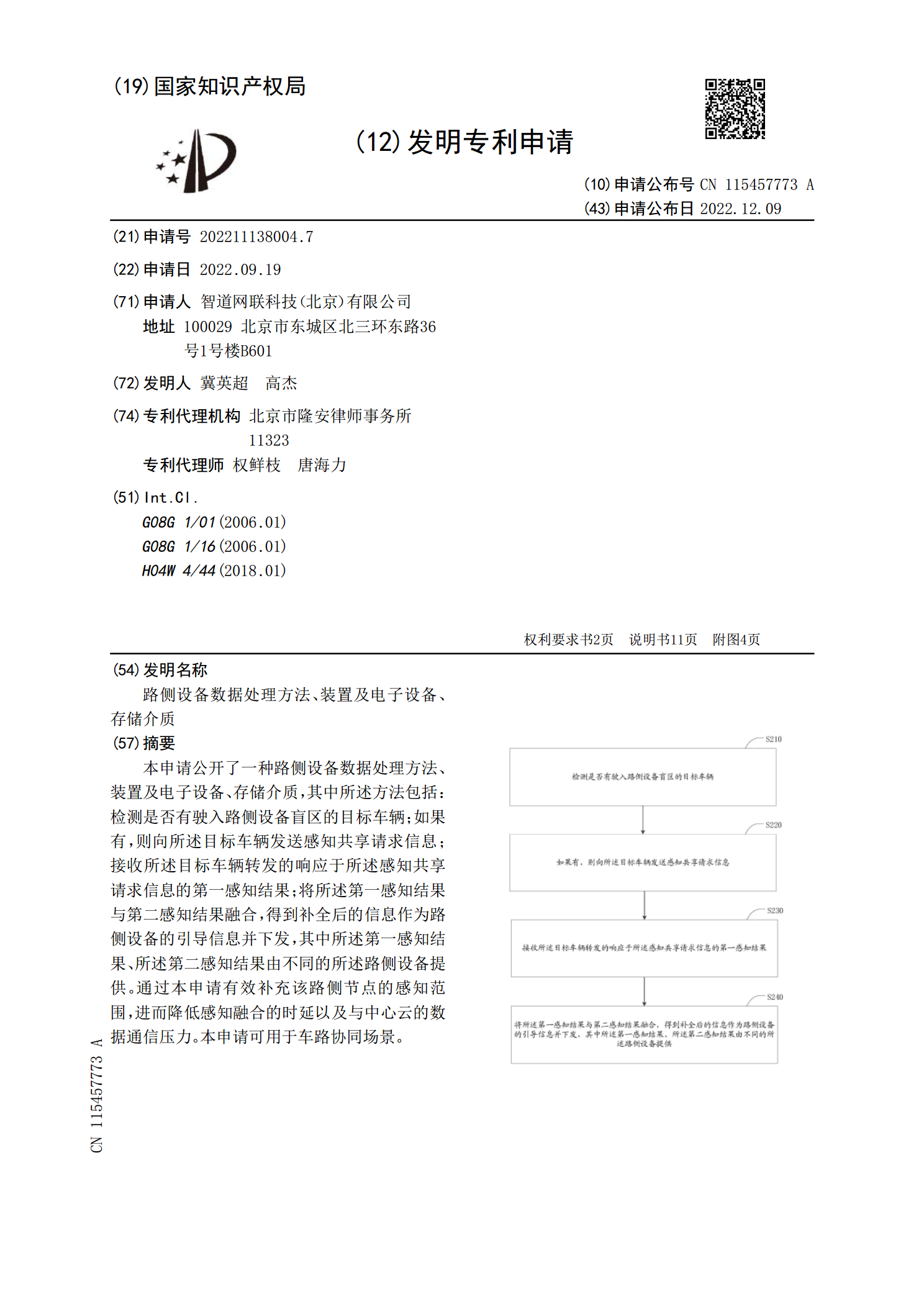
本申请公开了一种路侧设备数据处理方法、装置及电子设备、存储介质,其中所述方法包括:检测是否有驶入路侧设备盲区的目标车辆;如果有,则向所述目标车辆发送感知共享请求信息;接收所述目标车辆转发的响应于所述感知共享请求信息的第一感知结果;将所述第一感知结果与第二感知结果融合,得到补全后的信息作为路侧设备的引导信息并下发,其中所述第一感知结果、所述第二感知结果由不同的所述路侧设备提供。通过本申请有效补充该路侧节点的感知范围,进而降低感知融合的时延以及与中心云的数据通信压力。本申请可用于车路协同场景。

感知增强方法、装置、路侧基站、计算机设备和存储介质.pdf
本申请涉及一种感知增强方法、装置、路侧基站、计算机设备和存储介质。所述方法包括:对覆盖区域进行数据采集,得到包含目标对象的感知数据;将感知数据输入初始检测模型,得到目标对象的目标检测信息;接收目标对象发送的目标真实信息;目标真实信息与目标检测信息对应;迭代执行将感知数据输入初始检测模型,得到目标对象的目标检测信息,以及根据目标检测信息与目标真实信息之间的差异调整初始检测模型的参数的步骤,直至初始检测模型的网络层收敛,得到检测网络模型;检测网络模型用于对输入的感知数据进行处理得到感知增强结果。以目标真实信息
基于路侧感知设备的路态波纹处理方法、系统和存储介质.pdf
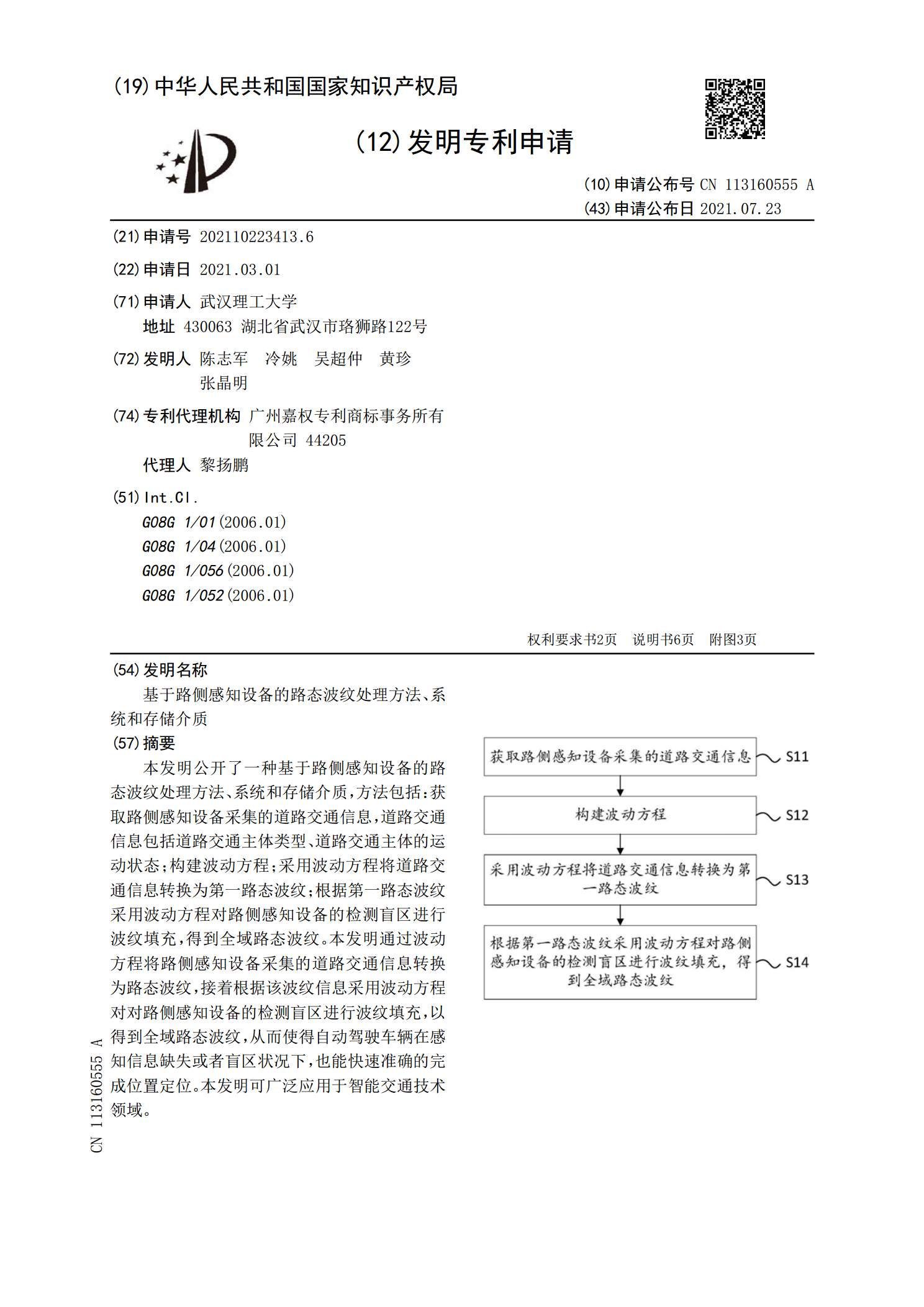
本发明公开了一种基于路侧感知设备的路态波纹处理方法、系统和存储介质,方法包括:获取路侧感知设备采集的道路交通信息,道路交通信息包括道路交通主体类型、道路交通主体的运动状态;构建波动方程;采用波动方程将道路交通信息转换为第一路态波纹;根据第一路态波纹采用波动方程对路侧感知设备的检测盲区进行波纹填充,得到全域路态波纹。本发明通过波动方程将路侧感知设备采集的道路交通信息转换为路态波纹,接着根据该波纹信息采用波动方程对对路侧感知设备的检测盲区进行波纹填充,以得到全域路态波纹,从而使得自动驾驶车辆在感知信息缺失或者