
一种基于多假设预测的海目标多站无源协同定位方法.pdf

宜欣****外呢


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于多假设预测的海目标多站无源协同定位方法.pdf
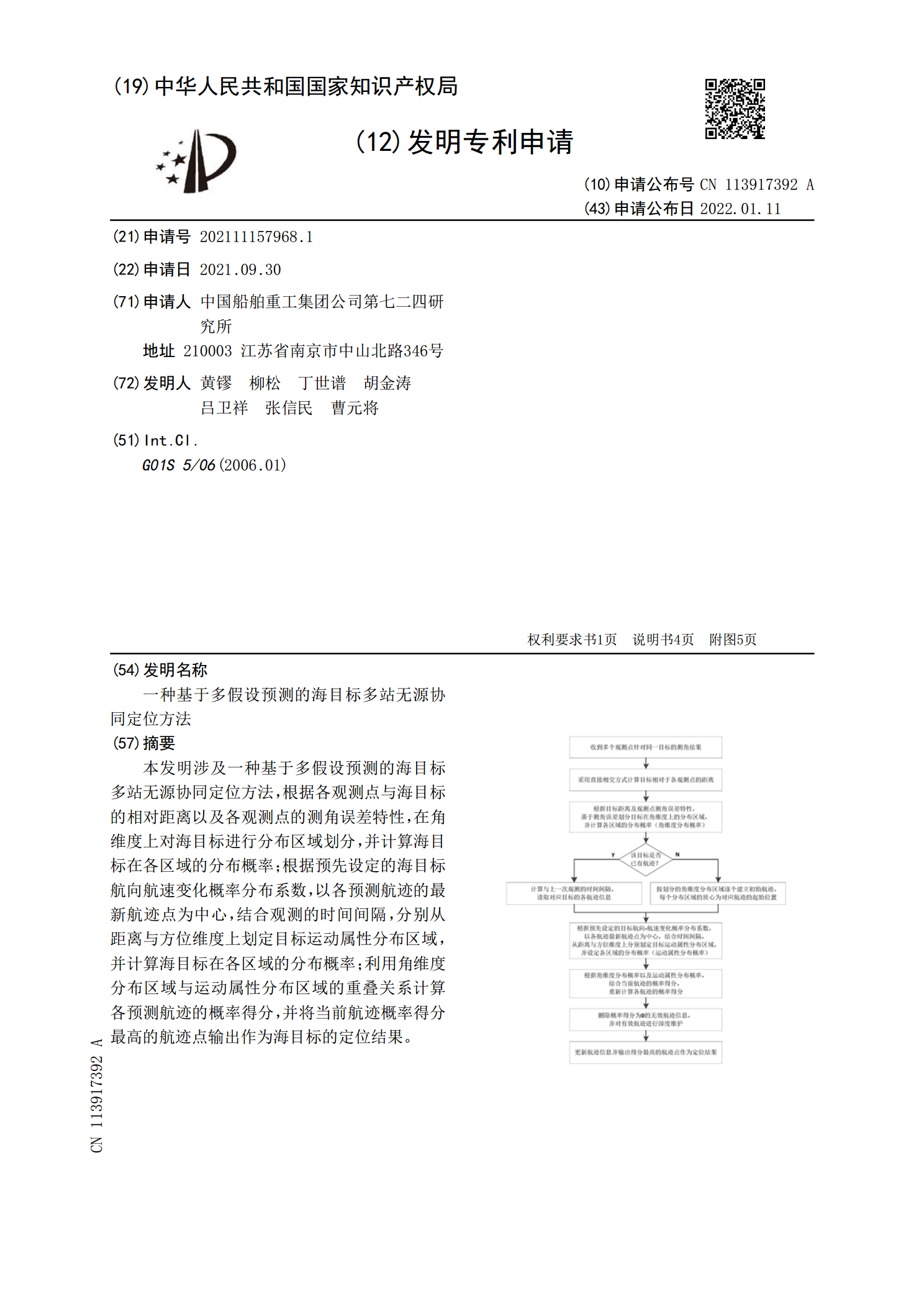
本发明涉及一种基于多假设预测的海目标多站无源协同定位方法,根据各观测点与海目标的相对距离以及各观测点的测角误差特性,在角维度上对海目标进行分布区域划分,并计算海目标在各区域的分布概率;根据预先设定的海目标航向航速变化概率分布系数,以各预测航迹的最新航迹点为中心,结合观测的时间间隔,分别从距离与方位维度上划定目标运动属性分布区域,并计算海目标在各区域的分布概率;利用角维度分布区域与运动属性分布区域的重叠关系计算各预测航迹的概率得分,并将当前航迹概率得分最高的航迹点输出作为海目标的定位结果。

多校准站TDOAFDOA无源定位方法.docx
多校准站TDOAFDOA无源定位方法标题:多校准站TDOA/FDOA无源定位方法摘要:随着通信技术的不断发展,定位技术在无线通信系统中起到了至关重要的作用。无源定位是一种基于接收信号的技术,在无需发送额外信号的情况下实现目标的定位。本文介绍了多校准站TDOA/FDOA无源定位方法,该方法通过利用多个校准站的时间差或频率差来计算目标的位置。详细介绍了TDOA和FDOA的原理及其在多校准站无源定位中的应用。同时,介绍了基于TDOA和FDOA的定位算法,并对实验结果进行了分析和讨论。1.引言无源定位技术是一种基

多校准站TDOAFDOA无源定位方法.docx
多校准站TDOAFDOA无源定位方法无线定位技术是现代无线通信系统中非常重要的技术之一,随着科技的发展,现在有许多无线定位技术来满足各种不同的应用需求。其中,多校准站TDOA/FDOA(TimeDifferenceofArrival/FrequencyDifferenceofArrival)无源定位方法在各个方面尤其是在室内定位中具有广泛的潜力和应用前景。1.理论基础多校准站TDOA/FDOA无源定位方法的实现基于三角定位原理,但其相比传统的定位方法在实现和误差控制方面有较大优势。该方法的主要思想是作为接
一种基于信号到达时间差的多站无源定位方法.pdf
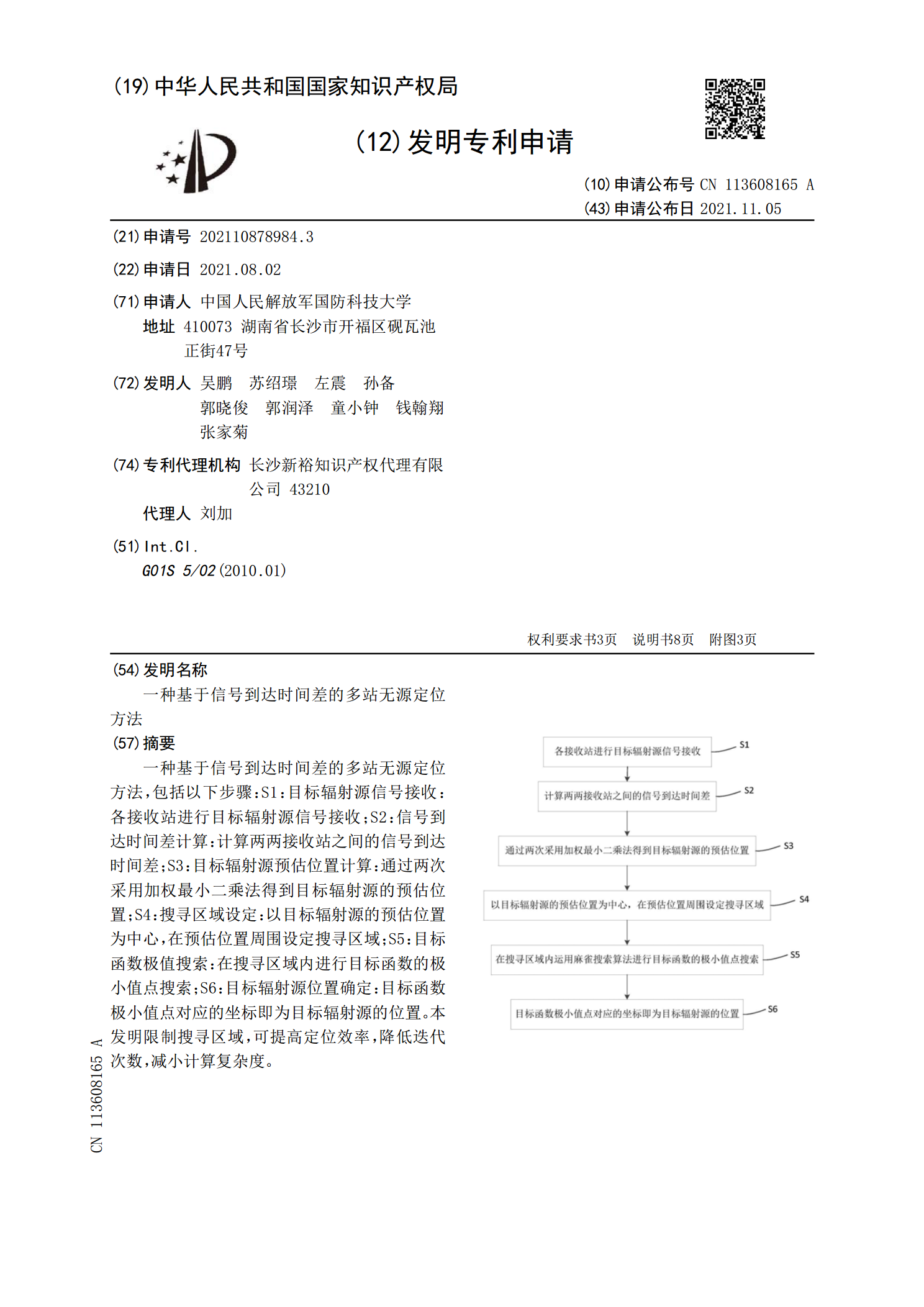
一种基于信号到达时间差的多站无源定位方法,包括以下步骤:S1:目标辐射源信号接收:各接收站进行目标辐射源信号接收;S2:信号到达时间差计算:计算两两接收站之间的信号到达时间差;S3:目标辐射源预估位置计算:通过两次采用加权最小二乘法得到目标辐射源的预估位置;S4:搜寻区域设定:以目标辐射源的预估位置为中心,在预估位置周围设定搜寻区域;S5:目标函数极值搜索:在搜寻区域内进行目标函数的极小值点搜索;S6:目标辐射源位置确定:目标函数极小值点对应的坐标即为目标辐射源的位置。本发明限制搜寻区域,可提高定位效率,

一种高精度移动多站无源定位方法.docx
一种高精度移动多站无源定位方法标题:一种高精度移动多站无源定位方法摘要:无源定位是一种利用接收到的信号来确定目标位置的定位技术。在移动多站无源定位中,目标设备不发送任何信号,而是利用接收到的环境中其他站点发出的信号进行定位。本文提出了一种高精度移动多站无源定位方法,通过将多站的接收信号进行时间和功率信息融合,实现目标设备的准确定位。实验结果表明,该方法具有较高的定位精度和鲁棒性。关键词:无源定位、移动多站、定位精度、时间信息、功率信息1.引言无源定位技术在无线通信、监控和导航等领域有着广泛应用。传统的无源