
轨道列车测速方法及装置.pdf

增梅****主啊

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
轨道列车测速方法及装置.pdf
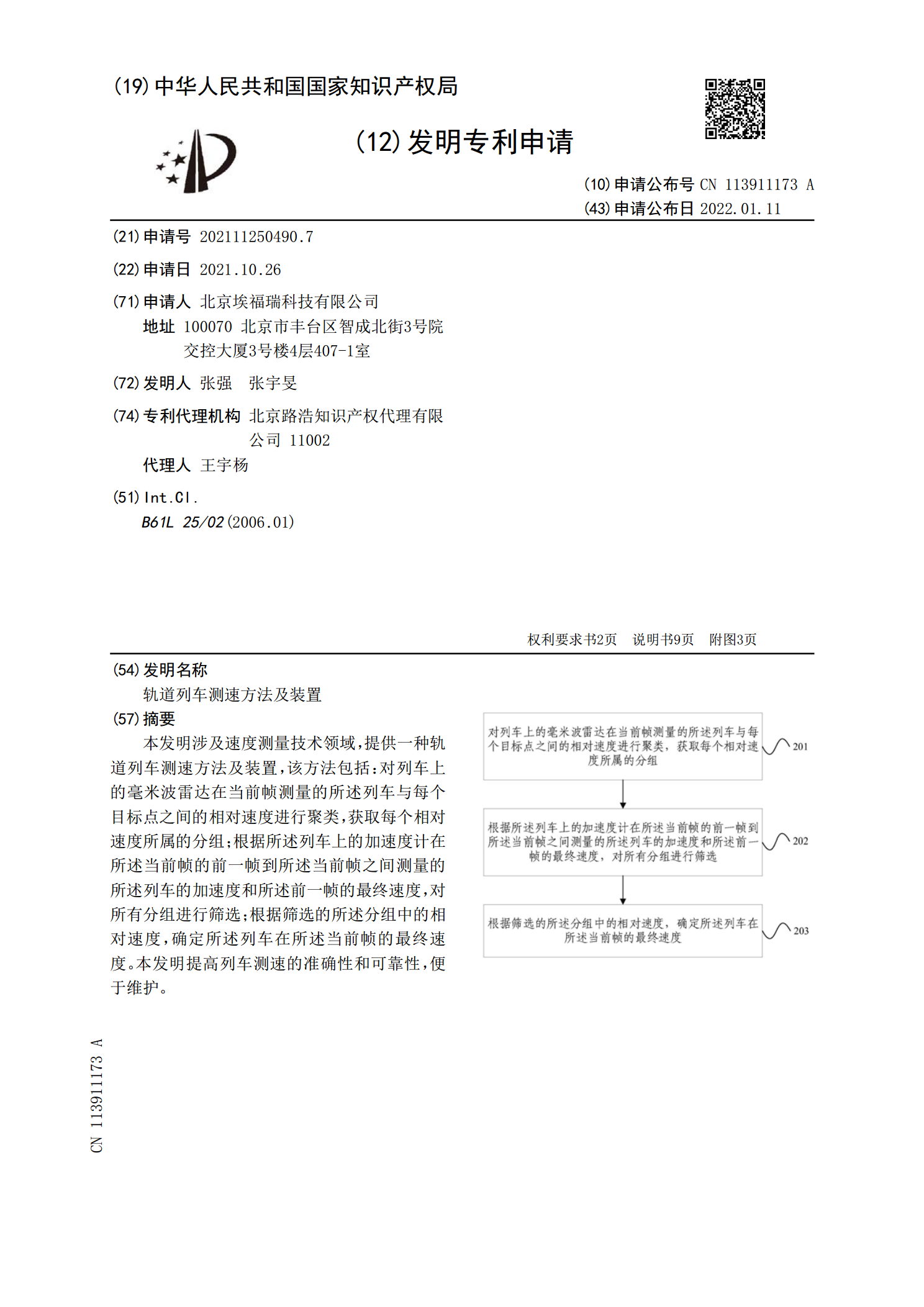
本发明涉及速度测量技术领域,提供一种轨道列车测速方法及装置,该方法包括:对列车上的毫米波雷达在当前帧测量的所述列车与每个目标点之间的相对速度进行聚类,获取每个相对速度所属的分组;根据所述列车上的加速度计在所述当前帧的前一帧到所述当前帧之间测量的所述列车的加速度和所述前一帧的最终速度,对所有分组进行筛选;根据筛选的所述分组中的相对速度,确定所述列车在所述当前帧的最终速度。本发明提高列车测速的准确性和可靠性,便于维护。

轨道列车测速测距方法及装置.pdf
本发明提供一种轨道列车测速测距方法及装置,其中,该方法包括:获取目标时间周期内多个速度传感器采集的目标列车的第一原始数据和多个加速度计采集的目标列车的第二原始数据;基于第一原始数据,获取目标列车的第一测速测距数据,并基于第二原始数据,获取目标列车的第二测速测距数据;对第二测速测距数据中的速度进行校正;对第一测速测距数据和进行速度校正后的第二测速测距数据进行融合,获取目标列车的测速测距结果;其中,第一测速测距数据包括速度、加速度和位移;第二测速测距数据包括速度、加速度和位移。本发明提供的轨道列车测速测距方法

列车的测速方法及装置.pdf
本发明提供一种列车的测速方法及装置。所述方法包括:获取列车运行前方的点云图像;在相邻两帧点云图像中的目标匹配的情况下,根据所述相邻两帧点云图像,确定列车在获取相邻两帧点云图像的时间差内的运行距离;根据所述运行距离以及所述时间差,确定列车的第一运行速度;通过毫米波雷达获取列车的第二运行速度;在所述第二运行速度小于预设速度阈值的情况下,将所述第一运行速度作为列车的速度;在所述第二运行速度大于等于预设速度阈值的情况下,将所述第二运行速度作为列车的速度。本发明提供的列车的测速方法及装置,通过融合点云匹配测速与毫米
列车及其测速方法和装置.pdf
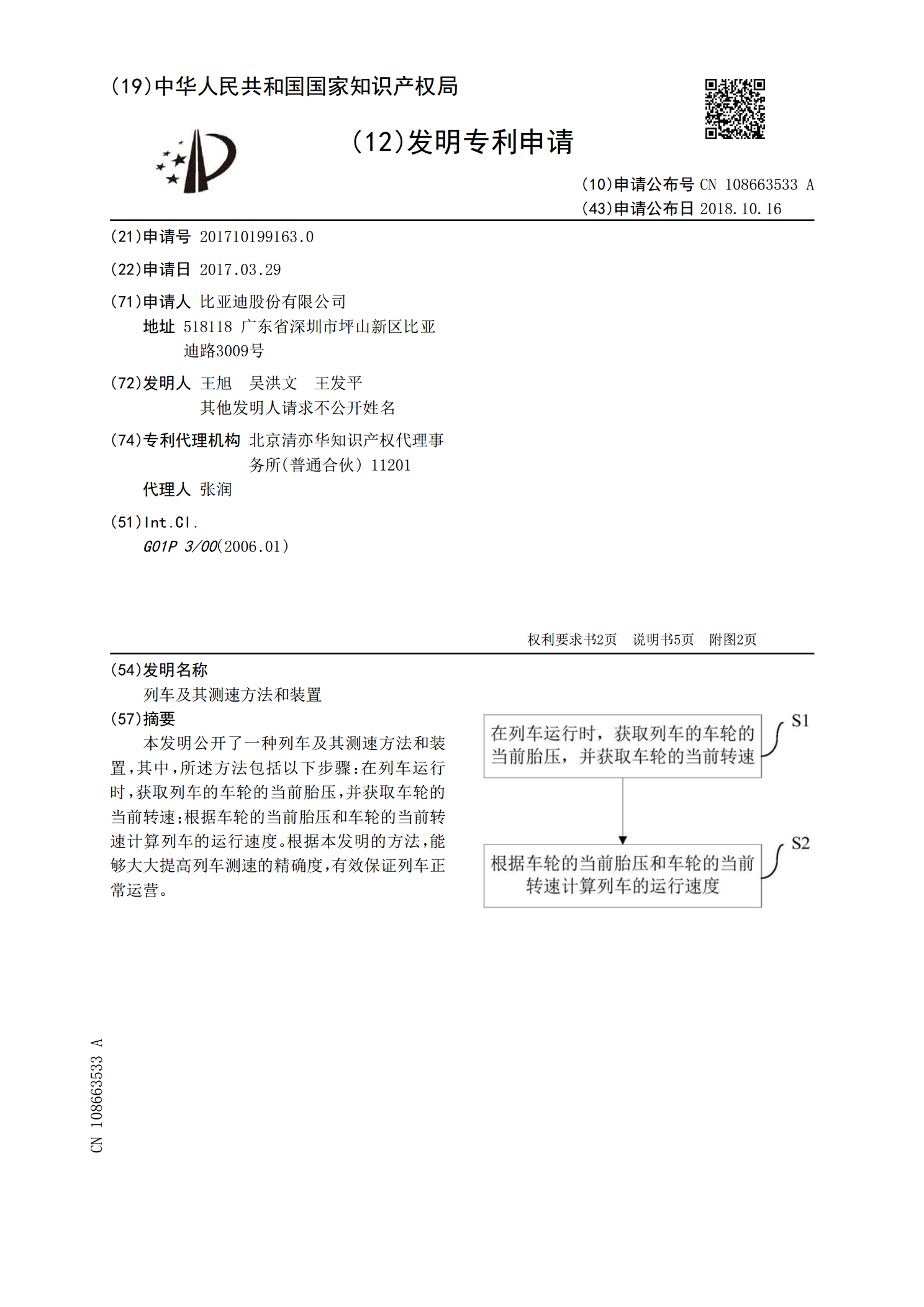
本发明公开了一种列车及其测速方法和装置,其中,所述方法包括以下步骤:在列车运行时,获取列车的车轮的当前胎压,并获取车轮的当前转速;根据车轮的当前胎压和车轮的当前转速计算列车的运行速度。根据本发明的方法,能够大大提高列车测速的精确度,有效保证列车正常运营。

基于光栅阵列的城市轨道列车定位与测速方法.docx
基于光栅阵列的城市轨道列车定位与测速方法摘要:随着城市轨道交通的不断发展,其定位与测速技术也得到了不断改进。本文基于光栅阵列技术,通过测量车轮距离和车速,实现了城市轨道列车的定位和测速。本文先介绍了轨道列车的几种定位方法,然后详细介绍了基于光栅阵列的定位测速方法。最后对该方法进行了实验验证,结果表明该方法具有较高的定位和测速精度,可以在城市轨道列车的运行控制中得到应用。一、引言城市轨道交通作为城市交通的重要组成部分,其发展程度和运行质量直接关系到城市交通的安全和效率。由于城市轨道列车在地下和地面等多种环境