
一种机载SAR图像快速仿真方法及设备.pdf

增梅****主啊

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种机载SAR图像快速仿真方法及设备.pdf
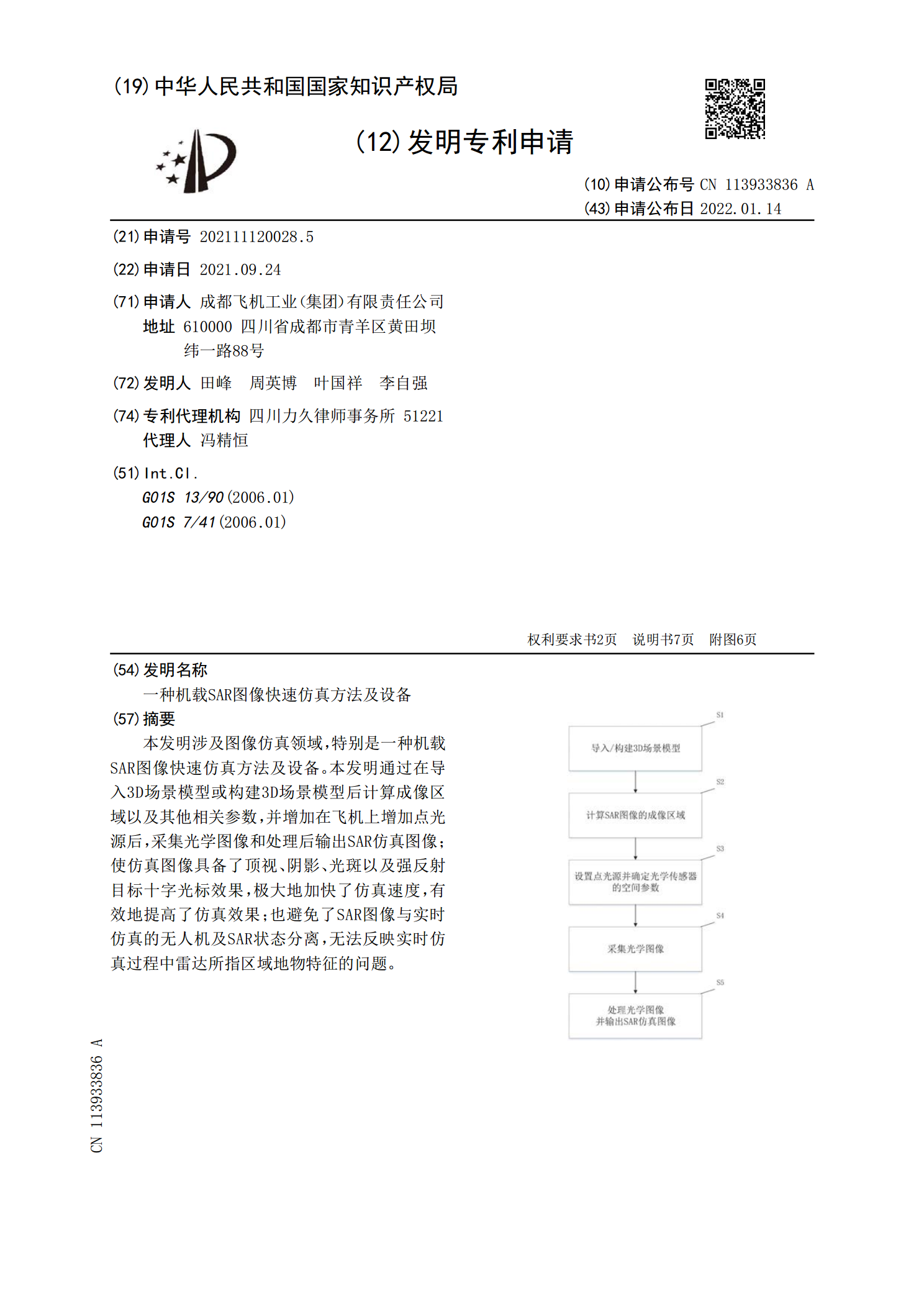
本发明涉及图像仿真领域,特别是一种机载SAR图像快速仿真方法及设备。本发明通过在导入3D场景模型或构建3D场景模型后计算成像区域以及其他相关参数,并增加在飞机上增加点光源后,采集光学图像和处理后输出SAR仿真图像;使仿真图像具备了顶视、阴影、光斑以及强反射目标十字光标效果,极大地加快了仿真速度,有效地提高了仿真效果;也避免了SAR图像与实时仿真的无人机及SAR状态分离,无法反映实时仿真过程中雷达所指区域地物特征的问题。
机载SAR图像目标定位方法.pdf
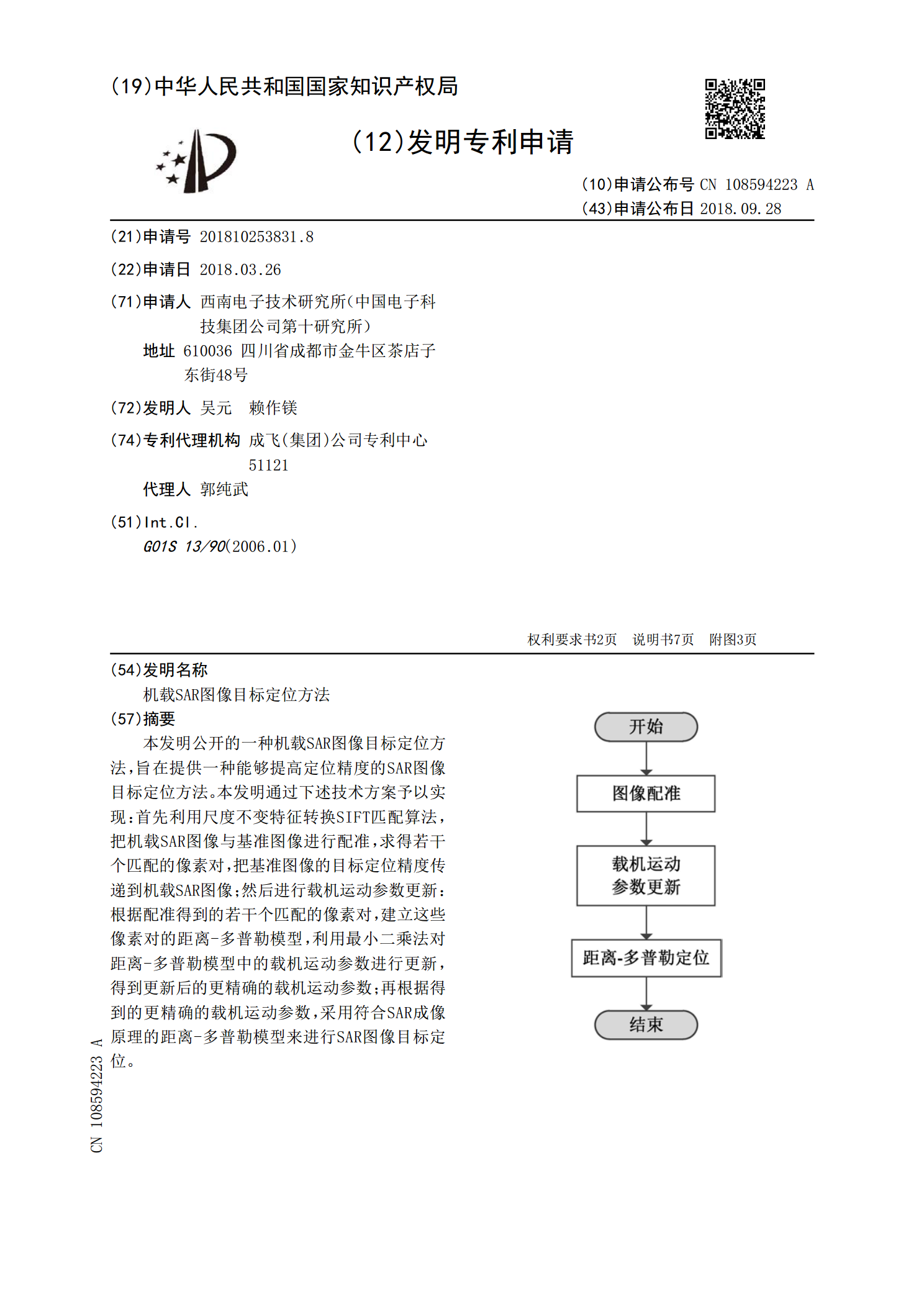
本发明公开的一种机载SAR图像目标定位方法,旨在提供一种能够提高定位精度的SAR图像目标定位方法。本发明通过下述技术方案予以实现:首先利用尺度不变特征转换SIFT匹配算法,把机载SAR图像与基准图像进行配准,求得若干个匹配的像素对,把基准图像的目标定位精度传递到机载SAR图像;然后进行载机运动参数更新:根据配准得到的若干个匹配的像素对,建立这些像素对的距离‑多普勒模型,利用最小二乘法对距离‑多普勒模型中的载机运动参数进行更新,得到更新后的更精确的载机运动参数;再根据得到的更精确的载机运动参数,采用符合SA
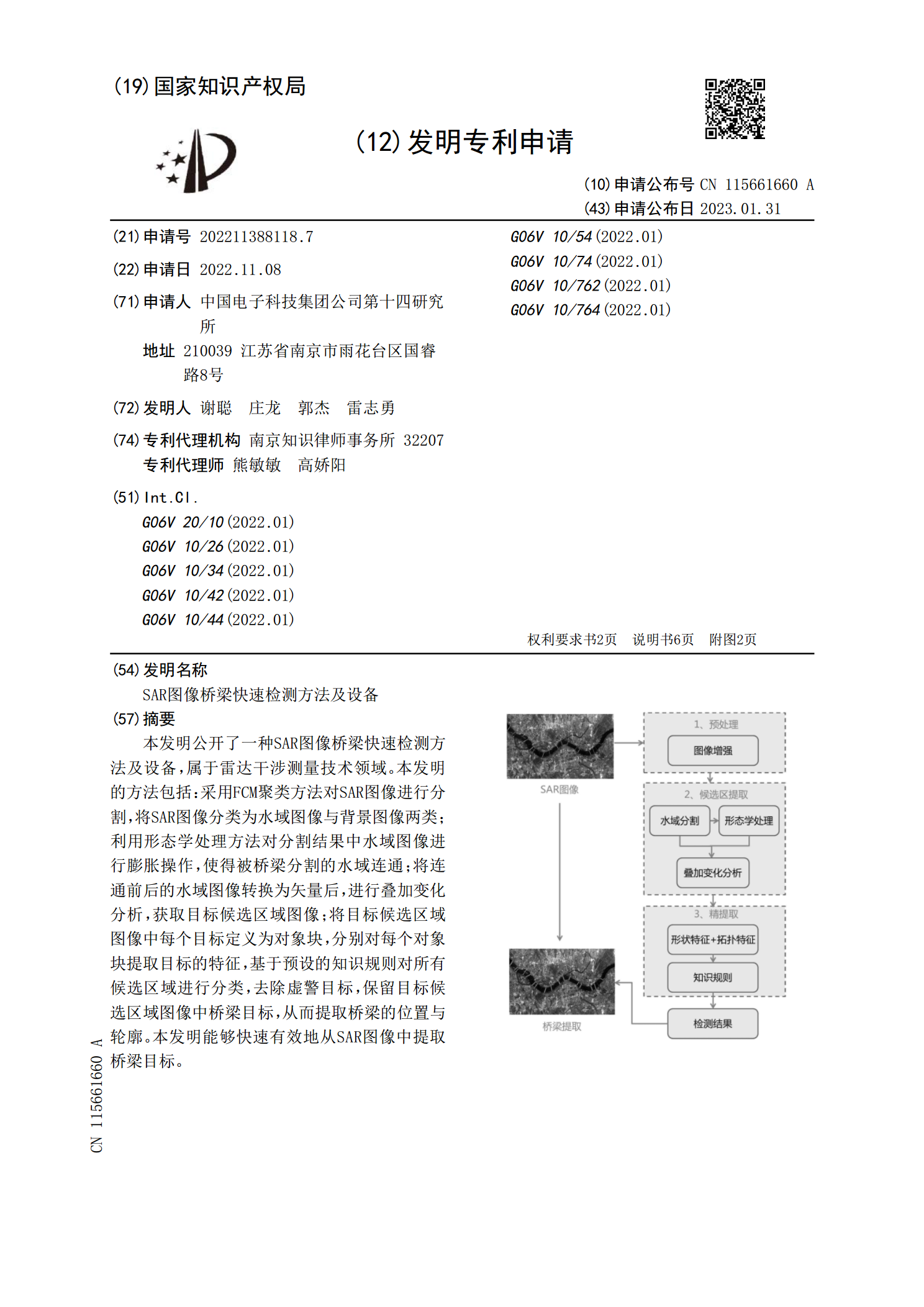
SAR图像桥梁快速检测方法及设备.pdf
本发明公开了一种SAR图像桥梁快速检测方法及设备,属于雷达干涉测量技术领域。本发明的方法包括:采用FCM聚类方法对SAR图像进行分割,将SAR图像分类为水域图像与背景图像两类;利用形态学处理方法对分割结果中水域图像进行膨胀操作,使得被桥梁分割的水域连通;将连通前后的水域图像转换为矢量后,进行叠加变化分析,获取目标候选区域图像;将目标候选区域图像中每个目标定义为对象块,分别对每个对象块提取目标的特征,基于预设的知识规则对所有候选区域进行分类,去除虚警目标,保留目标候选区域图像中桥梁目标,从而提取桥梁的位置与
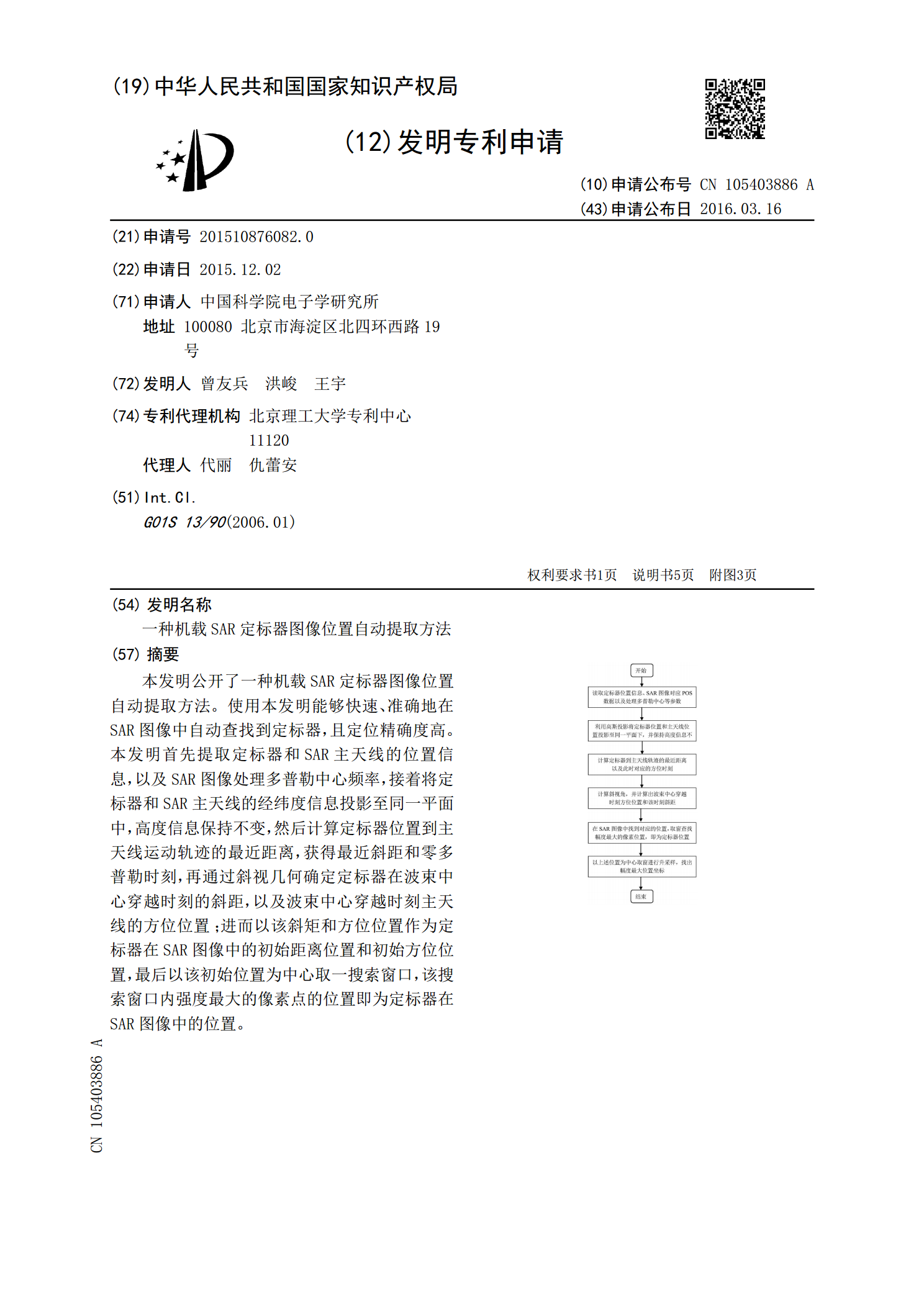
一种机载SAR定标器图像位置自动提取方法.pdf
本发明公开了一种机载SAR定标器图像位置自动提取方法。使用本发明能够快速、准确地在SAR图像中自动查找到定标器,且定位精确度高。本发明首先提取定标器和SAR主天线的位置信息,以及SAR图像处理多普勒中心频率,接着将定标器和SAR主天线的经纬度信息投影至同一平面中,高度信息保持不变,然后计算定标器位置到主天线运动轨迹的最近距离,获得最近斜距和零多普勒时刻,再通过斜视几何确定定标器在波束中心穿越时刻的斜距,以及波束中心穿越时刻主天线的方位位置;进而以该斜矩和方位位置作为定标器在SAR图像中的初始距离位置和初始
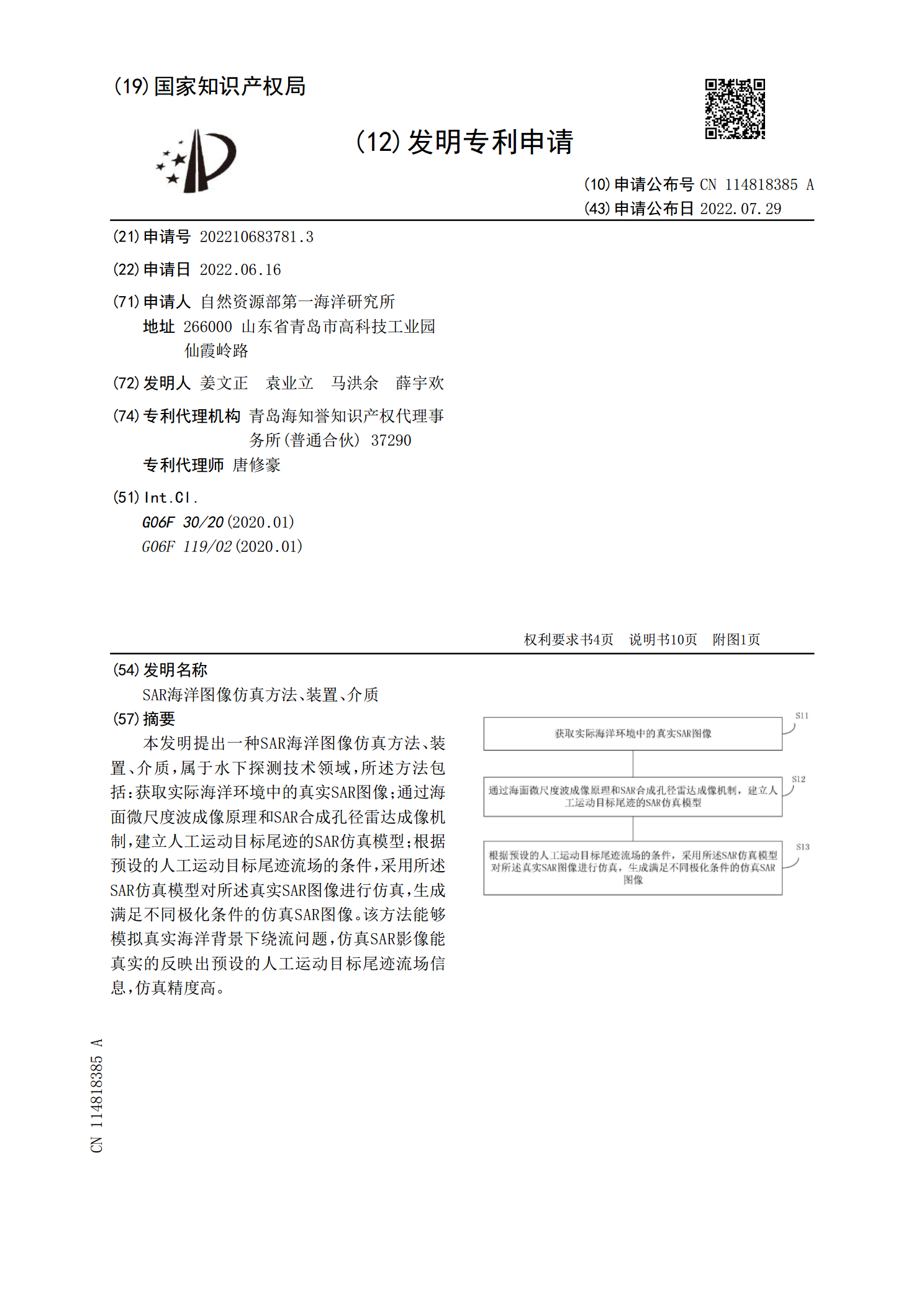
SAR海洋图像仿真方法、装置、介质.pdf
本发明提出一种SAR海洋图像仿真方法、装置、介质,属于水下探测技术领域,所述方法包括:获取实际海洋环境中的真实SAR图像;通过海面微尺度波成像原理和SAR合成孔径雷达成像机制,建立人工运动目标尾迹的SAR仿真模型;根据预设的人工运动目标尾迹流场的条件,采用所述SAR仿真模型对所述真实SAR图像进行仿真,生成满足不同极化条件的仿真SAR图像。该方法能够模拟真实海洋背景下绕流问题,仿真SAR影像能真实的反映出预设的人工运动目标尾迹流场信息,仿真精度高。