
机载SAR图像目标定位方法.pdf

兴朝****45


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机载SAR图像目标定位方法.pdf
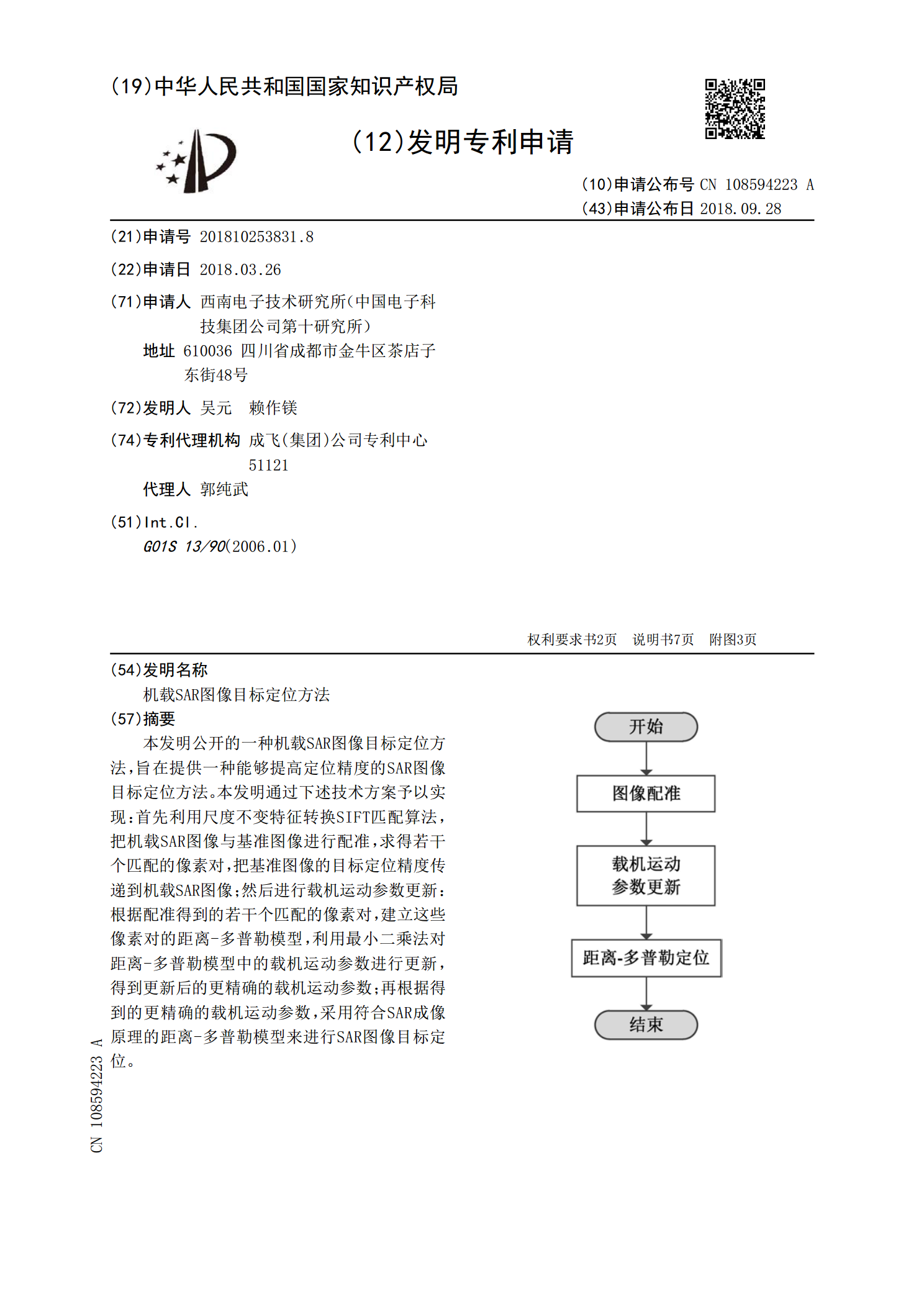
本发明公开的一种机载SAR图像目标定位方法,旨在提供一种能够提高定位精度的SAR图像目标定位方法。本发明通过下述技术方案予以实现:首先利用尺度不变特征转换SIFT匹配算法,把机载SAR图像与基准图像进行配准,求得若干个匹配的像素对,把基准图像的目标定位精度传递到机载SAR图像;然后进行载机运动参数更新:根据配准得到的若干个匹配的像素对,建立这些像素对的距离‑多普勒模型,利用最小二乘法对距离‑多普勒模型中的载机运动参数进行更新,得到更新后的更精确的载机运动参数;再根据得到的更精确的载机运动参数,采用符合SA
基于无控制点的双机载SAR图像目标定位的方法.pdf
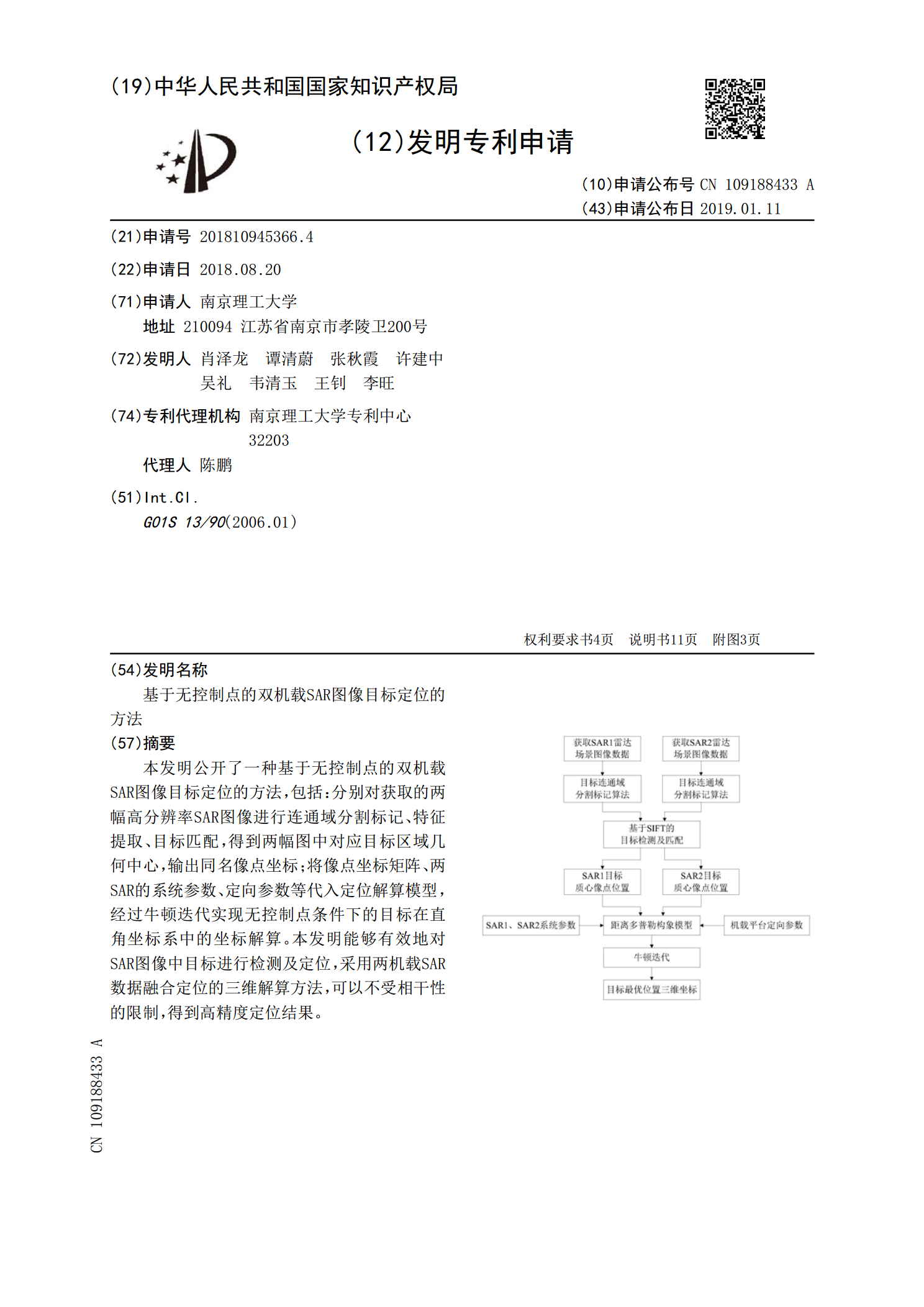
本发明公开了一种基于无控制点的双机载SAR图像目标定位的方法,包括:分别对获取的两幅高分辨率SAR图像进行连通域分割标记、特征提取、目标匹配,得到两幅图中对应目标区域几何中心,输出同名像点坐标;将像点坐标矩阵、两SAR的系统参数、定向参数等代入定位解算模型,经过牛顿迭代实现无控制点条件下的目标在直角坐标系中的坐标解算。本发明能够有效地对SAR图像中目标进行检测及定位,采用两机载SAR数据融合定位的三维解算方法,可以不受相干性的限制,得到高精度定位结果。
一种机载SAR图像快速仿真方法及设备.pdf
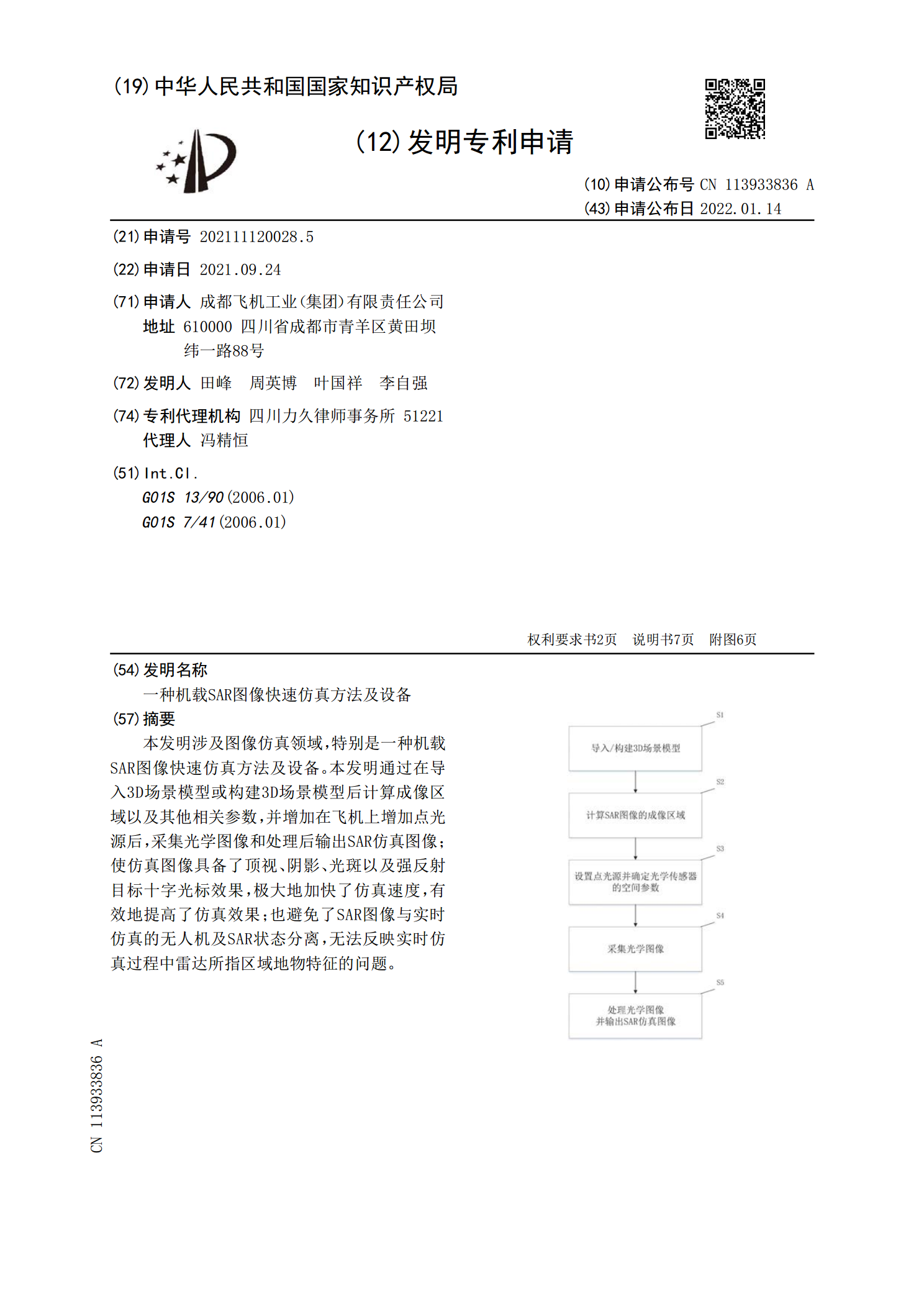
本发明涉及图像仿真领域,特别是一种机载SAR图像快速仿真方法及设备。本发明通过在导入3D场景模型或构建3D场景模型后计算成像区域以及其他相关参数,并增加在飞机上增加点光源后,采集光学图像和处理后输出SAR仿真图像;使仿真图像具备了顶视、阴影、光斑以及强反射目标十字光标效果,极大地加快了仿真速度,有效地提高了仿真效果;也避免了SAR图像与实时仿真的无人机及SAR状态分离,无法反映实时仿真过程中雷达所指区域地物特征的问题。

机载SAR图像几何校正方法研究的综述报告.docx
机载SAR图像几何校正方法研究的综述报告机载SAR(SyntheticApertureRadar)是一种使用雷达技术,利用飞机或卫星等载体,在大范围地面覆盖区域内对地物进行快速、高精度成像的遥感技术。由于在成像过程中SAR飞行中相对于地面运动,因此需要进行几何校正以恢复真实地面信息。本文综述了机载SAR图像几何校正的方法研究现状,并对比分析其优缺点。1.校正模型机载SAR图像的几何校正主要是使用旋转、平移和尺度变换。其中旋转矩阵是根据计算出的方向角、俯仰角和横滚角来确定的;平移是利用GPS(全球定位系统)
SAR图像点目标分割方法.pdf
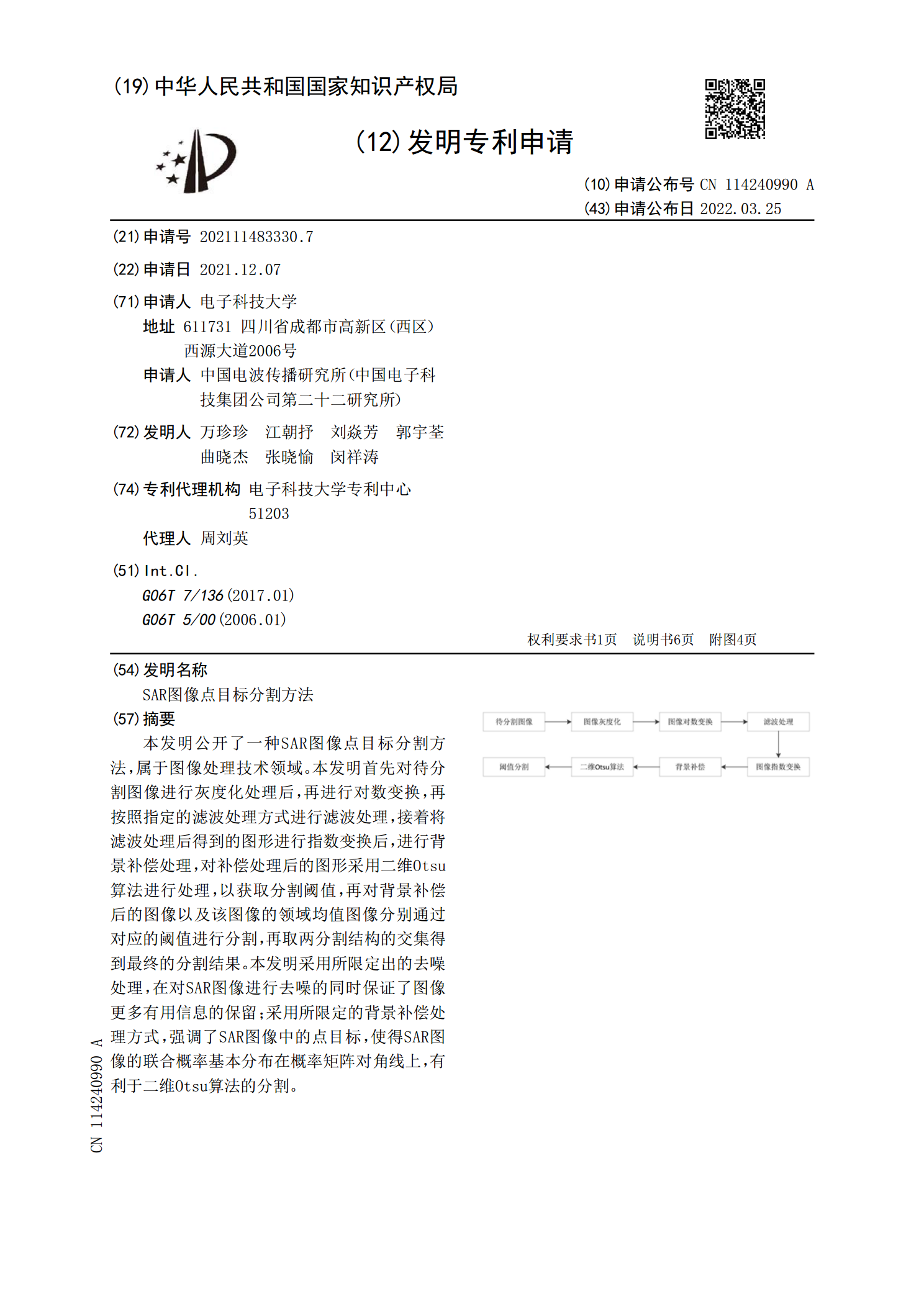
本发明公开了一种SAR图像点目标分割方法,属于图像处理技术领域。本发明首先对待分割图像进行灰度化处理后,再进行对数变换,再按照指定的滤波处理方式进行滤波处理,接着将滤波处理后得到的图形进行指数变换后,进行背景补偿处理,对补偿处理后的图形采用二维Otsu算法进行处理,以获取分割阈值,再对背景补偿后的图像以及该图像的领域均值图像分别通过对应的阈值进行分割,再取两分割结构的交集得到最终的分割结果。本发明采用所限定出的去噪处理,在对SAR图像进行去噪的同时保证了图像更多有用信息的保留;采用所限定的背景补偿处理方式