
基于车路协同环境的交通工具避免碰撞方法.pdf

论文****酱吖

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于车路协同环境的交通工具避免碰撞方法.pdf
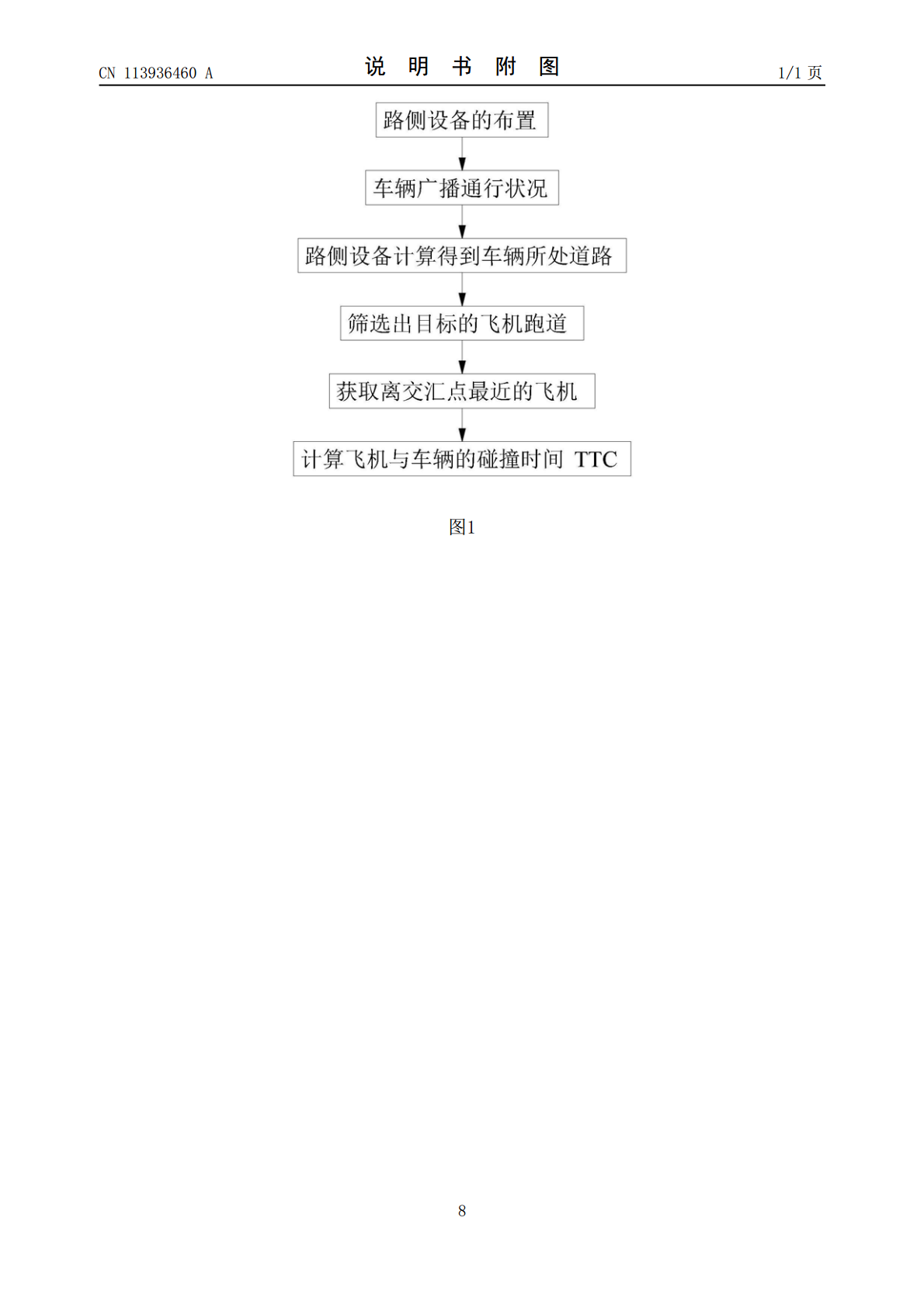
基于车路协同环境的交通工具避免碰撞方法,其特征在于包括以下步骤:S1,路侧设备的布置,于各交通道路两侧间隔布置路侧设备,路侧设备相互之间以及路侧设备与车辆、飞机相互通讯;S2,车辆广播通行状况;S3,路侧设备依据所获取广播信号计算得到车辆所处道路;S4,筛选出目标的飞机跑道;S5,获取离交汇点最近的飞机;S6,计算飞机与车辆的碰撞时间TTC。本发明的利用车路协同技术,提高机场的交通效率,以及降低机场交通事故的概率。特别是由于一些天气原因,机场的能见度有限,地面上的工作的汽车会由于视线受限,通过V2X路侧设

一种基于车联网的车路协同防碰撞系统.pdf
本发明针对现有技术中存在的技术问题,提供一种基于车联网的车路协同防碰撞系统,其包括:视频传感器,进行障碍物检测及智能感知车道检测处理,实时视频开窗对车辆本身进行监控;盲区检测系统,包括毫米波雷达、超声波雷达和激光雷达,用于检测盲区状态;所述视频传感器、雷达传感器、定位模块、疲劳检测模块、显示处理模块、预警处理模块分别连接有传输模块,所述传输模块分别连接控制处理模块,所述控制处理模块连接有网络传输模块,所述网络传输模块连接有服务平台。判断障碍物靠近车辆时提醒驾驶人员注意,在气候条件不好的情况下,需要结合毫米

一种基于车路协同的车辆防碰撞提示方法、装置及系统.pdf
本申请实施例公开一种基于车路协同的车辆防碰撞提示方法、装置及系统,所述服务器相连接的数据采集终端,所述服务器和所述数据采集终端通过互联网与应用终端相连接;所述数据采集终端,用于向所述服务器发送预设距离路况数据;根据预设距离路况数据,确定预设距离路况可视范围;在预设距离路况可视范围内进行图形特征标记,根据聚类筛选分析结果筛选障碍物特征,将障碍物特征与图形特征数据库内预设特征进行比对,根据预设特征比对结果,确定障碍物位置并推送给用户界面,解决现有防碰撞提醒系统留给驾驶员操作改变方向的时间长度较低,防碰撞预判范

基于车路协同环境的干线信号控制方法研究.docx
基于车路协同环境的干线信号控制方法研究基于车路协同环境的干线信号控制方法研究摘要:随着交通流量的增加以及城市化的快速发展,交通拥堵已成为城市面临的重要问题之一。传统的信号控制方法已经不能满足交通需求。车路协同技术作为一种新兴的交通管理方法,可以优化交通流量分配和信号控制。本文通过研究和分析车路协同环境下的干线信号控制方法,对交通拥堵问题提出了一种解决方案。1.引言随着城市交通流量的增加,交通拥堵已成为城市面临的重要问题之一。传统的固定时间、感应器和优化方法等信号控制方法已经不能满足交通需求。因此,车路协同

基于V2X的车路协同方法及车路协同系统.pdf
本发明提供了一种基于V2X的车路协同方法及车路协同系统,所述车路协同方法包括以下步骤:通过所述第二车辆采集所述第一车辆的第一数据信息;通过V2X通信模块采集所述第一车辆的第二数据信息,并将所述第二数据信息和所述第一数据信息融合处理,以形成车辆信息;将所述车辆信息上传至云端,并由所述云端实时共享给所述后方车辆;所述后方车辆根据所述车辆信息协同完成驾驶决策。本发明的基于V2X的车路协同方法,可以将第二车辆采集的第一数据信息和V2X通信模块采集的第二数据信息进行融合处理,消除信息传递盲区,融合处理后的车辆信息可