
一种轨迹点处理方法和装置.pdf

一只****签网

1/10
2/10
3/10
4/10
5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种轨迹点处理方法和装置.pdf
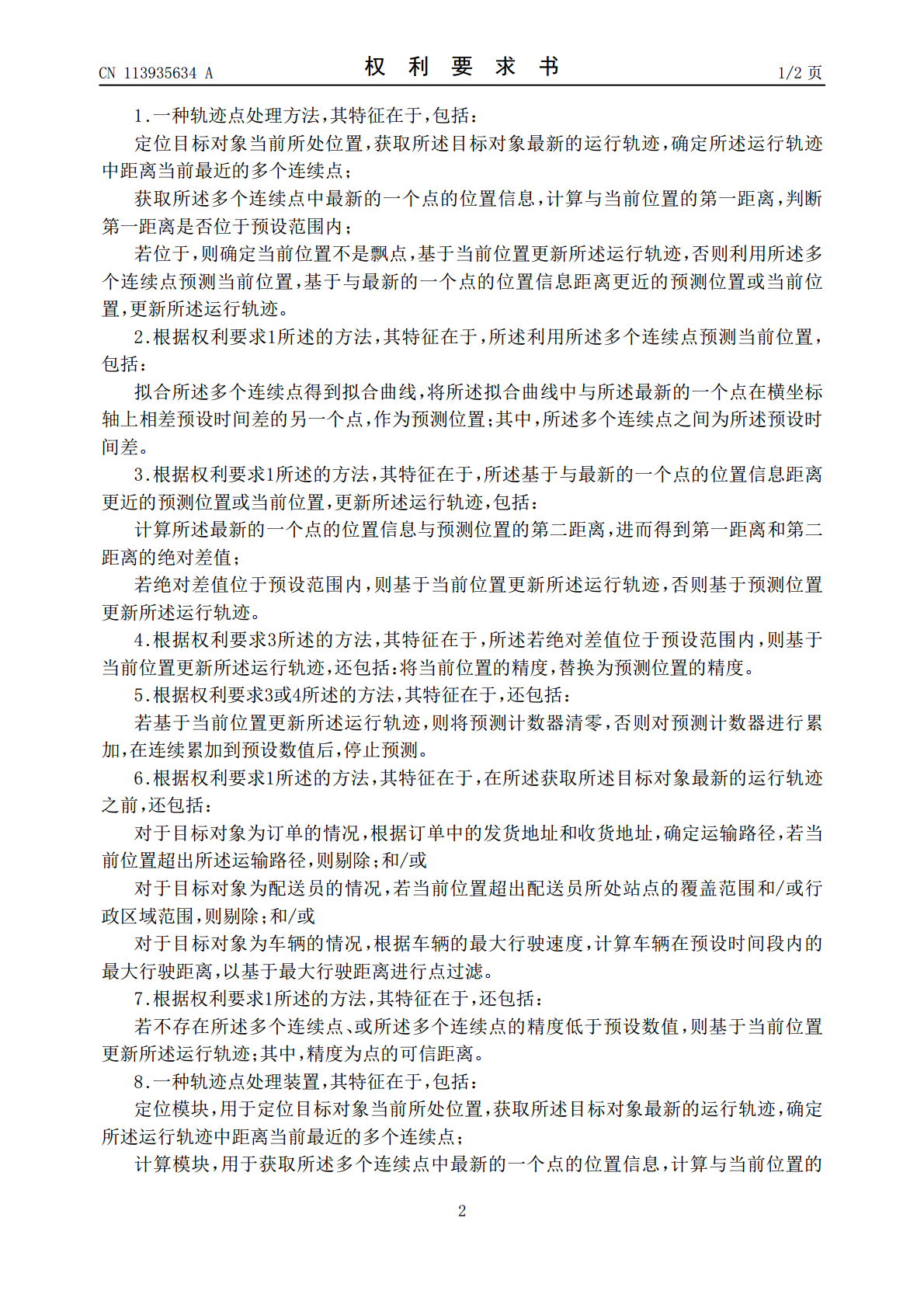
本发明公开了一种轨迹点处理方法和装置,涉及仓储物流领域。该方法的一具体实施方式包括:定位目标对象当前所处位置,获取目标对象最新的运行轨迹,确定运行轨迹中距离当前最近的多个连续点;获取多个连续点中最新的一个点的位置信息,计算与当前位置的第一距离,判断第一距离是否位于预设范围内;若位于,则确定当前位置不是飘点,基于当前位置更新运行轨迹,否则基于多个连续点预测当前位置,基于与最新的一个点的位置信息距离更近的预测位置或当前位置,更新运行轨迹。该实施方式在获取到的运行轨迹的基础上,通过预测位置与系统实际定位的位置,

一种规划点胶轨迹的方法和装置、点胶设备.pdf
本发明适用于点胶技术领域,提供了一种规划点胶轨迹的方法,包括以下步骤:通过3D激光传感器扫描待点胶物体的轮廓,获得待点胶物体的轮廓数据;基于所述轮廓数据,构建点云数据;从所述点云数据内选取路径点;根据所选取的路径点,生成至少一条点胶轨迹。与现有技术相比,一则本发明方法与人眼视觉无关,避免了因人眼视觉误差而导致的生成路径与实际路径的偏差,所生成的轨迹具有非常高的精度;二则本发明方法在点云数据内选取路径点,选点方式方便快捷,即使选取多点用于生成点胶轨迹,也可以做到非常快速,大大缩短了生成点胶轨迹的时间。本发明
一种点云数据的处理方法及装置和点云渲染方法及装置.pdf
本发明涉及计算机技术领域,具体涉及一种点云数据的处理方法及装置和点云渲染方法及装置。其中,点云数据的处理方法包括:基于原始点云数据的空间特性构建原始点云数据的八叉树结构,八叉树结构包括叶子节点和非叶子节点;将非叶子节点按照空间结构等分成多个空间块;遍历多个空间块中的每个空间块,如果其中包含点云,则从中抽取一个点云的点云数据,得到抽稀后的非叶子节点。通过对八叉树结构的非叶子节点进行抽稀处理,使得在利用非叶子节点的点云数据进行场景渲染时,从而提高了渲染效率。另外,由于抽稀得到的点云均匀地分散在包含有点云的空间
一种车辆轨迹的处理方法及装置.pdf
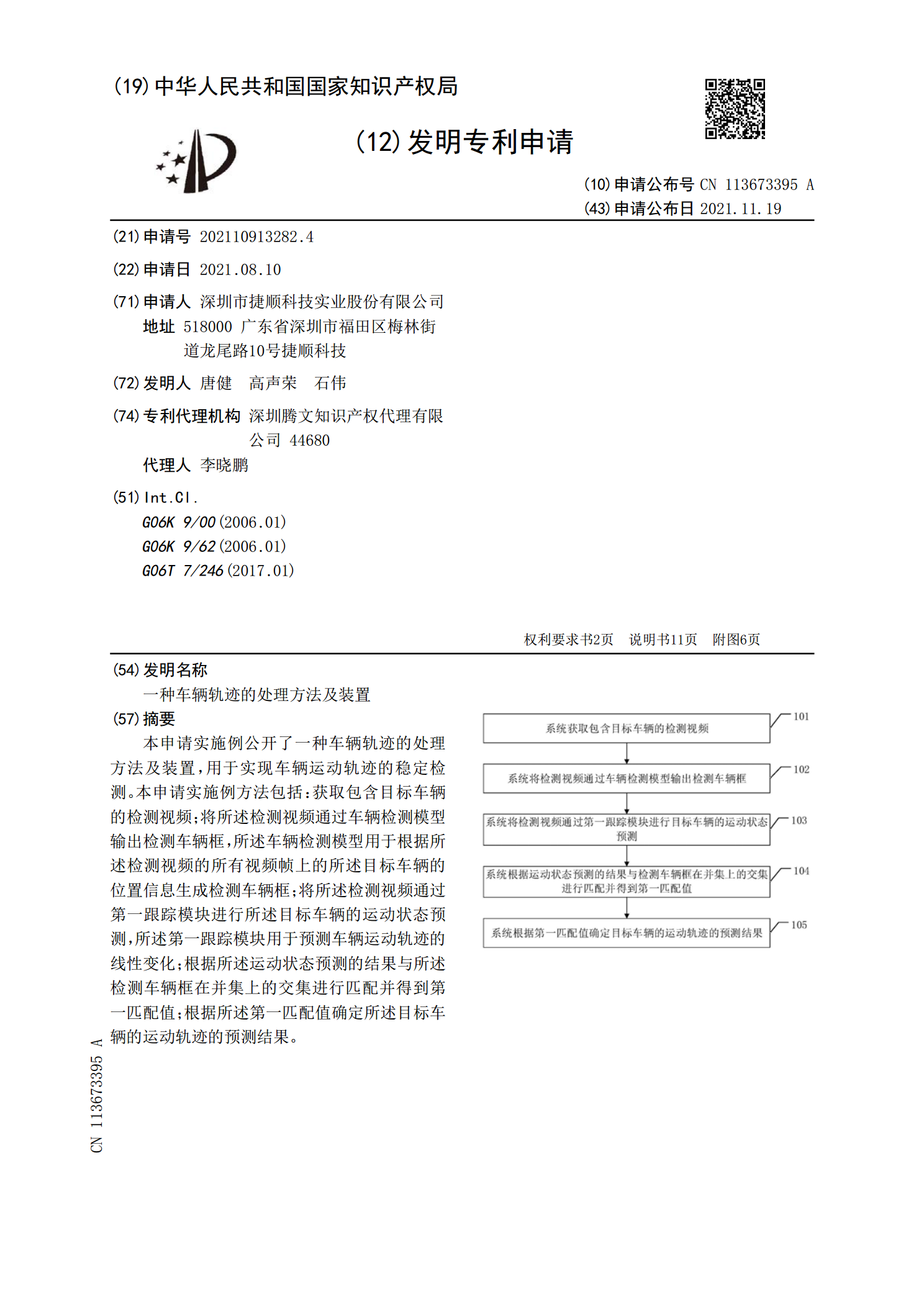
本申请实施例公开了一种车辆轨迹的处理方法及装置,用于实现车辆运动轨迹的稳定检测。本申请实施例方法包括:获取包含目标车辆的检测视频;将所述检测视频通过车辆检测模型输出检测车辆框,所述车辆检测模型用于根据所述检测视频的所有视频帧上的所述目标车辆的位置信息生成检测车辆框;将所述检测视频通过第一跟踪模块进行所述目标车辆的运动状态预测,所述第一跟踪模块用于预测车辆运动轨迹的线性变化;根据所述运动状态预测的结果与所述检测车辆框在并集上的交集进行匹配并得到第一匹配值;根据所述第一匹配值确定所述目标车辆的运动轨迹的预测结

一种轨迹生成方法和装置.pdf
本申请实施例提供了一种轨迹生成方法,所述方法包括:接收当前输入的绘制点形成的轨迹信息;按照预设条件将已输入的当前绘制点进行渲染;将渲染后的当前绘制点写入预置的容器中;当所述容器中存在当前轨迹信息在先的绘制点时,在所述容器中合成所述在先绘制点和当前绘制点。本申请实施例通过在多笔笔触绘制的时候,将当前正在画的笔触之外的笔触缓存起来,避免了重复渲染。