
目标地图模型的训练方法、定位方法及相关装置.pdf

景山****魔王

1/10
2/10

3/10

4/10
5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
目标地图模型的训练方法、定位方法及相关装置.pdf
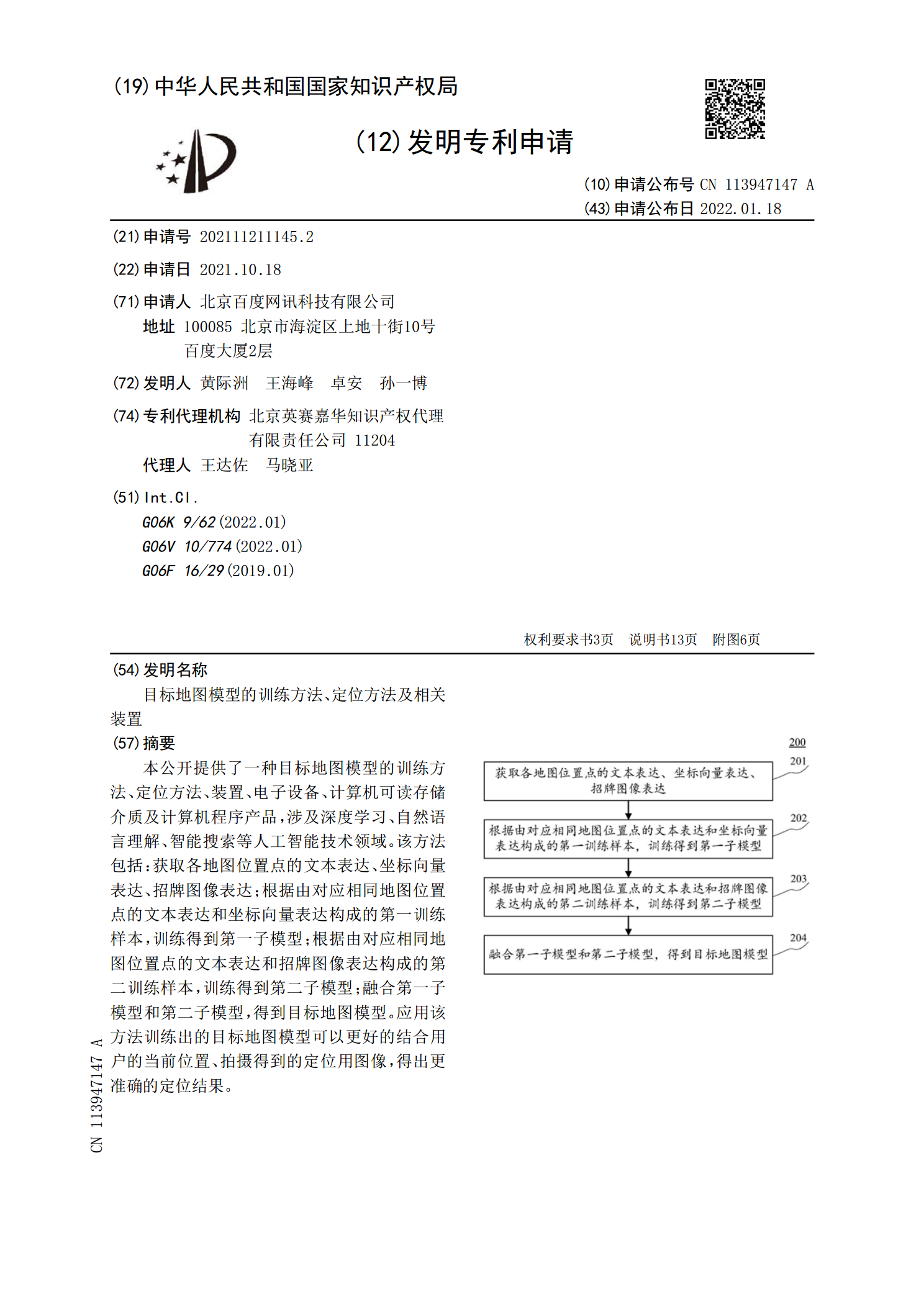
本公开提供了一种目标地图模型的训练方法、定位方法、装置、电子设备、计算机可读存储介质及计算机程序产品,涉及深度学习、自然语言理解、智能搜索等人工智能技术领域。该方法包括:获取各地图位置点的文本表达、坐标向量表达、招牌图像表达;根据由对应相同地图位置点的文本表达和坐标向量表达构成的第一训练样本,训练得到第一子模型;根据由对应相同地图位置点的文本表达和招牌图像表达构成的第二训练样本,训练得到第二子模型;融合第一子模型和第二子模型,得到目标地图模型。应用该方法训练出的目标地图模型可以更好的结合用户的当前位置、拍

目标定位模型训练方法、目标定位方法及装置.pdf
本发明提供了一种目标定位模型训练方法、目标定位方法及装置,可以应用于人工智能技术领域。该目标定位模型训练方法包括:获取样本数据集;将每个图像样本输入初始模型的像素特征提取层,输出图像数据中每一个像素点的像素特征;将第一特征数据和第二特征数据输入初始模型的激活图生成层,输出前景激活图和背景激活图;将第三特征数据和第四特征数据分别输入初始模型的感知特征提取层,输出前景感知特征和背景感知特征;将第五特征数据和第六特征数据分别输入初始模型的分类层,输出分类结果;以及根据分类结果和图像类别标签调整初始模型的模型参数
动作定位模型的训练方法、装置及动作定位方法.pdf
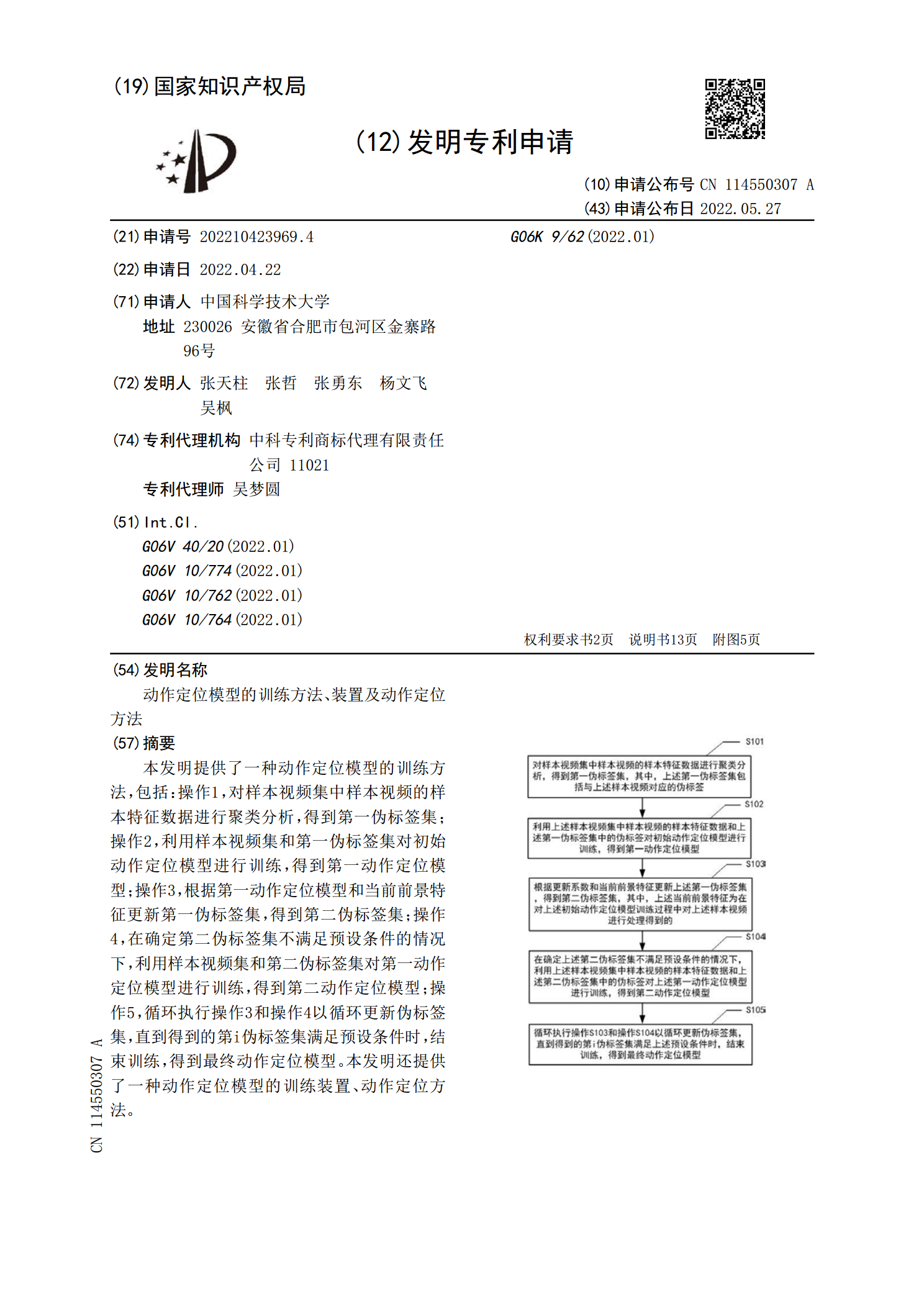
本发明提供了一种动作定位模型的训练方法,包括:操作1,对样本视频集中样本视频的样本特征数据进行聚类分析,得到第一伪标签集;操作2,利用样本视频集和第一伪标签集对初始动作定位模型进行训练,得到第一动作定位模型;操作3,根据第一动作定位模型和当前前景特征更新第一伪标签集,得到第二伪标签集;操作4,在确定第二伪标签集不满足预设条件的情况下,利用样本视频集和第二伪标签集对第一动作定位模型进行训练,得到第二动作定位模型;操作5,循环执行操作3和操作4以循环更新伪标签集,直到得到的第i伪标签集满足预设条件时,结束训练

交通目标识别模型训练方法、交通目标定位方法、装置.pdf
本发明实施例提供了一种交通目标识别模型训练方法、交通目标定位方法、装置。交通目标识别模型训练方法包括:获取训练样本集,训练样本集包括多个交通目标的训练样本;将每个交通目标的训练样本输入到预先构建的交通目标识别网络中,对交通目标识别网络进行训练,获得训练好的交通目标特征识别模型;其中,预先构建的交通目标识别模型,包括第一沙漏网络模型和第二沙漏网络模型;第一沙漏网络模型包括第一损失函数计算层,第二沙漏网络模型包括第二损失函数计算层。本发明实施例的能够提高对交通目标识别、定位的精准性和实时性。
模型训练方法、目标检测方法及相关装置.pdf
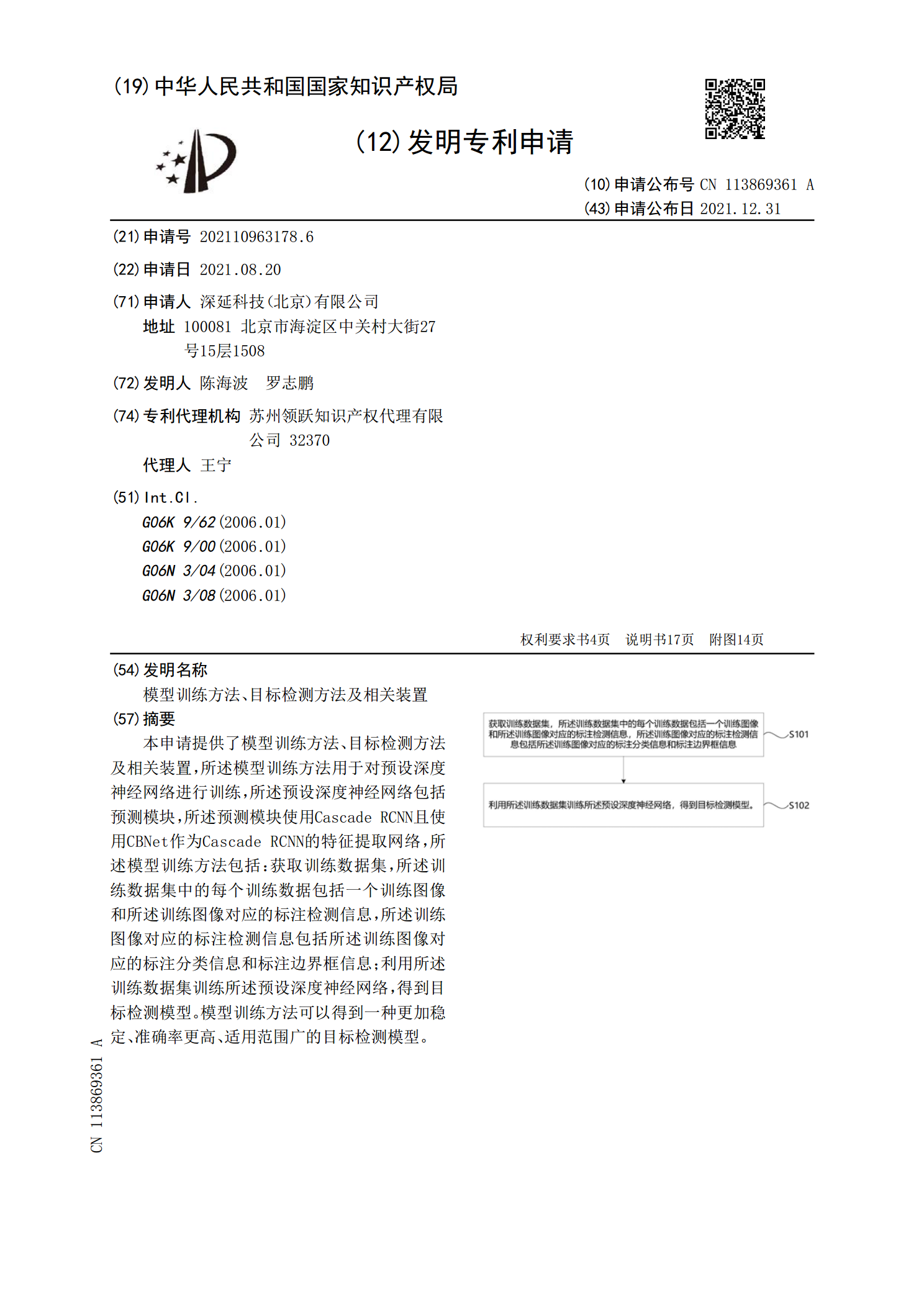
本申请提供了模型训练方法、目标检测方法及相关装置,所述模型训练方法用于对预设深度神经网络进行训练,所述预设深度神经网络包括预测模块,所述预测模块使用CascadeRCNN且使用CBNet作为CascadeRCNN的特征提取网络,所述模型训练方法包括:获取训练数据集,所述训练数据集中的每个训练数据包括一个训练图像和所述训练图像对应的标注检测信息,所述训练图像对应的标注检测信息包括所述训练图像对应的标注分类信息和标注边界框信息;利用所述训练数据集训练所述预设深度神经网络,得到目标检测模型。模型训练方法可以