
空间点云测量系统及标定、重建方法.pdf

书錦****by

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
空间点云测量系统及标定、重建方法.pdf
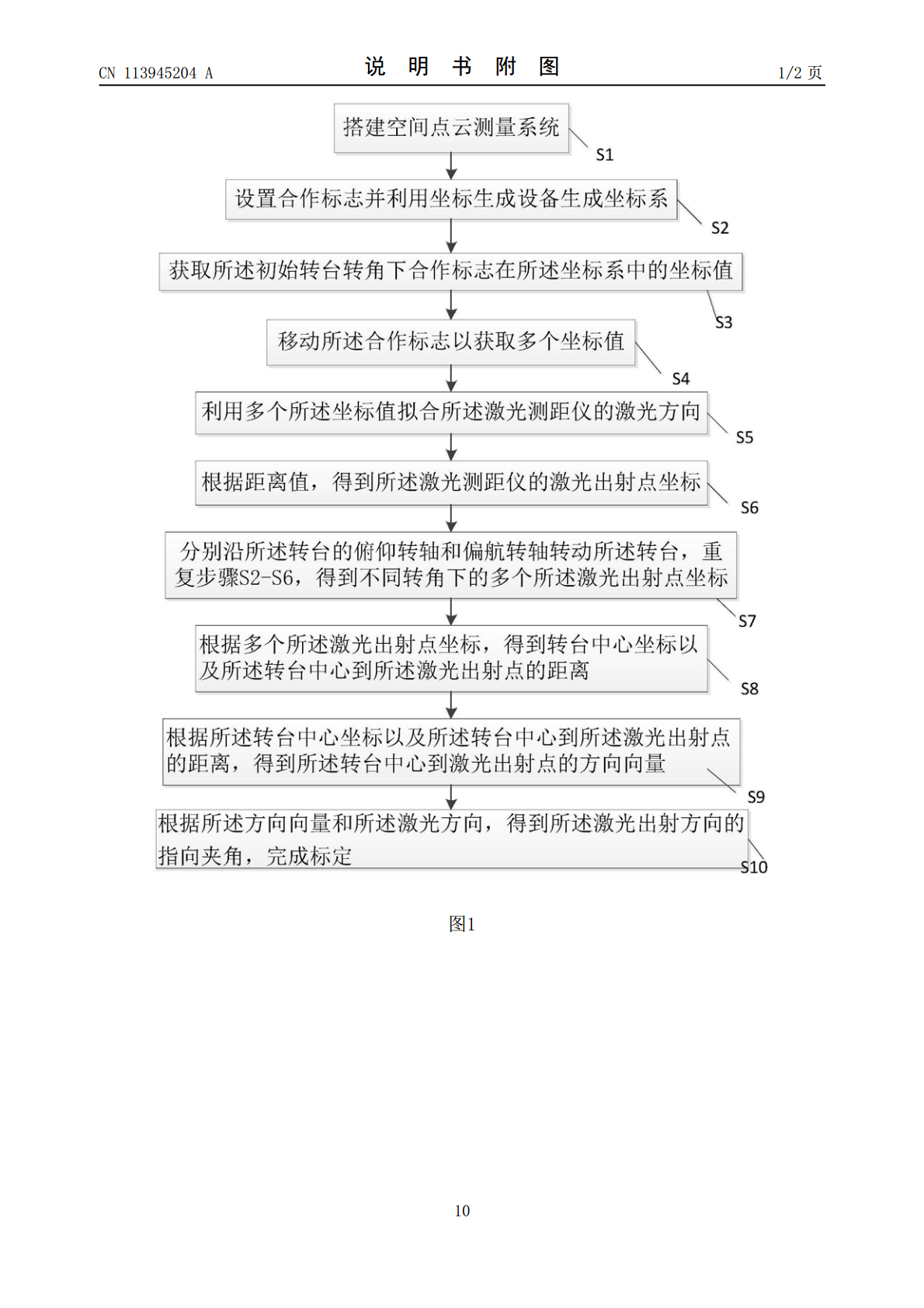
本发明公开了一种空间点云测量系统及标定、重建方法,所述空间点云测量系统包括:激光测距仪,所述激光测距仪用于获取待测目标至所述激光测距仪之间的空间距离信息;转台,所述激光测距仪固设于所述转台上,并且所述转台包括俯仰转轴和偏航转轴,所述俯仰转轴与所述偏航转轴的轴线于空间内相交,以用于提供空间点云测量过程中的角度信息;处理器,所述处理器用于获取所述空间距离信息和所述空间点云测量过程中的角度信息;控制所述激光测距仪和所述转台切换于工作状态和闲置状态;以及对所述空间点云进行标定和重建。

电磁跟踪系统空间位置测量精度标定方法研究.docx
电磁跟踪系统空间位置测量精度标定方法研究电磁跟踪系统是一种用于测量目标物体在空间中位置的技术。它利用电磁波在空间中传播的特性和目标物体上安装的电磁传感器来实现位置测量。在实际应用中,为了确保测量结果的准确性和可靠性,需要对电磁跟踪系统的空间位置测量精度进行标定。本文将研究电磁跟踪系统空间位置测量精度标定方法。首先,为了实现电磁跟踪系统的空间位置测量,需要建立一个数学模型来描述电磁波在空间中传播的过程。这个模型将包括电磁波传播速度、传感器接收到的电磁波信号以及目标物体的位置信息等。通过对这个模型进行数学分析

基于空间状态八叉树的点云模型表面重建方法.doc
基于空间状态八叉树的点云模型表面重建方法在计算机图形学领域中,大量的研究工作都致力于对现实物体的几何建模。通过三维扫描仪获得的一个散列的点云数据,并对该点云数据进行网格模型重建在虚拟博物馆,虚拟战场,虚拟手术,游戏,电影等领域中得到广泛应用。由于三维扫描仪获得点云数据时会存在采样点数据的丢失、噪声、信息缺失等缺陷,这就给表面重建过程带来了一定的困难。因此,如何对包含噪声和信息缺失的点云数据进行表面重建是目前图形学和虚拟现实领域研究的热点和难点之一。采样点的法向的信息在点云模型重建过程中有着至关重要的作用;

基于角度约束空间殖民算法的树点云几何结构重建方法.docx
基于角度约束空间殖民算法的树点云几何结构重建方法基于角度约束空间殖民算法的树点云几何结构重建方法摘要:在现实世界中,树木作为自然界中最常见的植物之一,具有重要的生态和经济价值。准确地重建树木的几何结构对于环境监测、生态研究和城市规划等领域具有重要意义。本文基于角度约束空间殖民算法提出了一种树点云几何结构重建方法。该方法通过利用激光扫描获取的树木点云数据,通过角度约束将点云数据分割成不同的组,然后利用空间殖民算法进行树木几何结构重建。实验结果表明,该方法能够有效地重建出树木的几何结构,并且具有较高的准确性和

车载移动测量系统点云精度评定方法.pptx
,目录PartOnePartTwo系统组成和工作原理点云数据的获取方式点云数据的应用领域PartThree绝对定位精度评定相对定位精度评定点云数据与地图匹配精度评定精度评定指标的选取PartFour实验场地和设备准备实验方案设计和实施实验结果分析和讨论精度评定方法的优缺点分析PartFive点云精度评定在道路检测中的应用点云精度评定在建筑物三维重建中的应用点云精度评定在考古探测中的应用点云精度评定在其他领域的应用PartSix点云精度评定方法的改进方向未来点云精度评定技术的发展趋势点云精度评定技术的发展对