
基于空间状态八叉树的点云模型表面重建方法.doc

含秀****66


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于空间状态八叉树的点云模型表面重建方法.doc
基于空间状态八叉树的点云模型表面重建方法在计算机图形学领域中,大量的研究工作都致力于对现实物体的几何建模。通过三维扫描仪获得的一个散列的点云数据,并对该点云数据进行网格模型重建在虚拟博物馆,虚拟战场,虚拟手术,游戏,电影等领域中得到广泛应用。由于三维扫描仪获得点云数据时会存在采样点数据的丢失、噪声、信息缺失等缺陷,这就给表面重建过程带来了一定的困难。因此,如何对包含噪声和信息缺失的点云数据进行表面重建是目前图形学和虚拟现实领域研究的热点和难点之一。采样点的法向的信息在点云模型重建过程中有着至关重要的作用;

基于自适应八叉树分割点云的表面模型重建.docx
基于自适应八叉树分割点云的表面模型重建标题:基于自适应八叉树分割点云的表面模型重建摘要:点云是一种描述三维空间中对象形状的数据结构,其广泛应用于三维重建、计算机视觉、机器人感知等领域。本论文提出了一种基于自适应八叉树分割点云的表面模型重建方法。该方法通过自适应地对点云进行八叉树分割,实现了对点云数据的高效处理和准确的表面重建。实验结果表明,该方法具有较好的重建效果和处理速度,可应用于实际的三维模型重建任务。1.引言三维模型重建是计算机视觉和计算机图形学中的一个重要研究领域。传统的三维模型重建方法中,基于点

基于自适应八叉树分割点云的表面模型重建.docx
基于自适应八叉树分割点云的表面模型重建基于自适应八叉树分割点云的表面模型重建摘要:点云数据是一种基于三维空间的离散数据表示形式,它在许多领域中被广泛应用,如计算机视觉、机器人技术和虚拟现实等。点云数据中的信息对于场景的建模、分析和重建非常重要。本文提出了一种基于自适应八叉树分割的表面模型重建方法,该方法可以有效地提取点云数据中的特征,并生成高质量、细节丰富的表面模型。实验结果表明,本文提出的方法能够在保持准确度的同时提高计算效率。关键词:点云数据;八叉树分割;表面模型重建1.引言点云数据是由大量离散的三维

基于角度约束空间殖民算法的树点云几何结构重建方法.docx
基于角度约束空间殖民算法的树点云几何结构重建方法基于角度约束空间殖民算法的树点云几何结构重建方法摘要:在现实世界中,树木作为自然界中最常见的植物之一,具有重要的生态和经济价值。准确地重建树木的几何结构对于环境监测、生态研究和城市规划等领域具有重要意义。本文基于角度约束空间殖民算法提出了一种树点云几何结构重建方法。该方法通过利用激光扫描获取的树木点云数据,通过角度约束将点云数据分割成不同的组,然后利用空间殖民算法进行树木几何结构重建。实验结果表明,该方法能够有效地重建出树木的几何结构,并且具有较高的准确性和
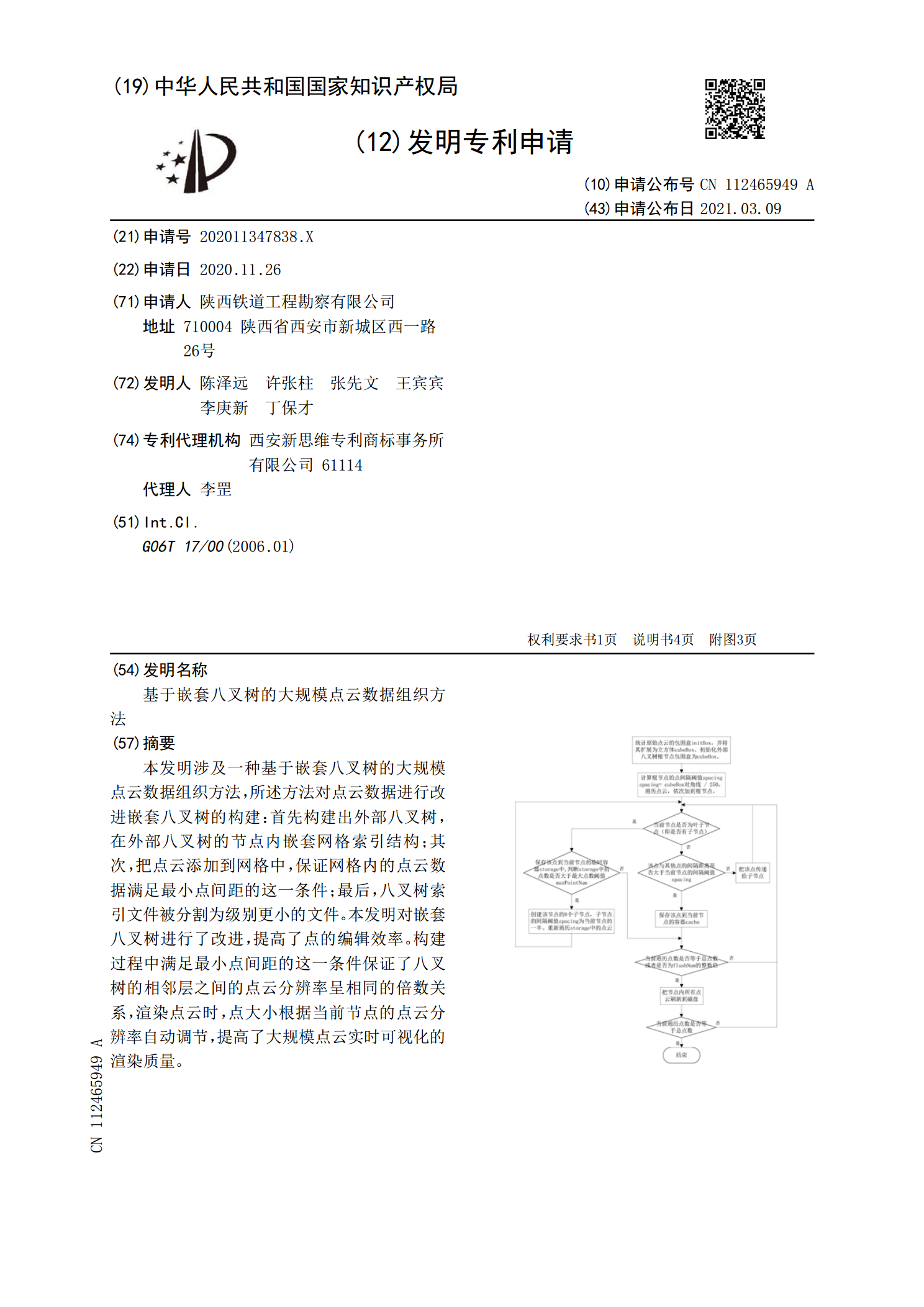
基于嵌套八叉树的大规模点云数据组织方法.pdf
本发明涉及一种基于嵌套八叉树的大规模点云数据组织方法,所述方法对点云数据进行改进嵌套八叉树的构建:首先构建出外部八叉树,在外部八叉树的节点内嵌套网格索引结构;其次,把点云添加到网格中,保证网格内的点云数据满足最小点间距的这一条件;最后,八叉树索引文件被分割为级别更小的文件。本发明对嵌套八叉树进行了改进,提高了点的编辑效率。构建过程中满足最小点间距的这一条件保证了八叉树的相邻层之间的点云分辨率呈相同的倍数关系,渲染点云时,点大小根据当前节点的点云分辨率自动调节,提高了大规模点云实时可视化的渲染质量。