
定位方法、装置、电子设备及计算机可读存储介质.pdf

书生****写意

1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
定位方法、装置、电子设备及计算机可读存储介质.pdf
本申请公开了一种定位方法、装置、电子设备及计算机可读存储介质,属于定位技术领域。方法包括:获取需要定位的对象的第一状态变量,第一状态变量包括对象在至少一个时刻的参考信息,参考信息包括IMU信息、视觉信息和GNSS信息。基于第一状态变量包括的参考信息确定IMU误差、视觉误差和GNSS误差,基于IMU误差、视觉误差和GNSS误差确定目标误差。通过最小化目标误差的过程对第一状态变量包括的参考信息进行更新,得到第二状态变量,第二状态变量用于对对象进行定位。本申请定位准确度高,适用于多种需要定位的场景。例如,适用于
定位方法、装置、电子设备及计算机可读存储介质.pdf
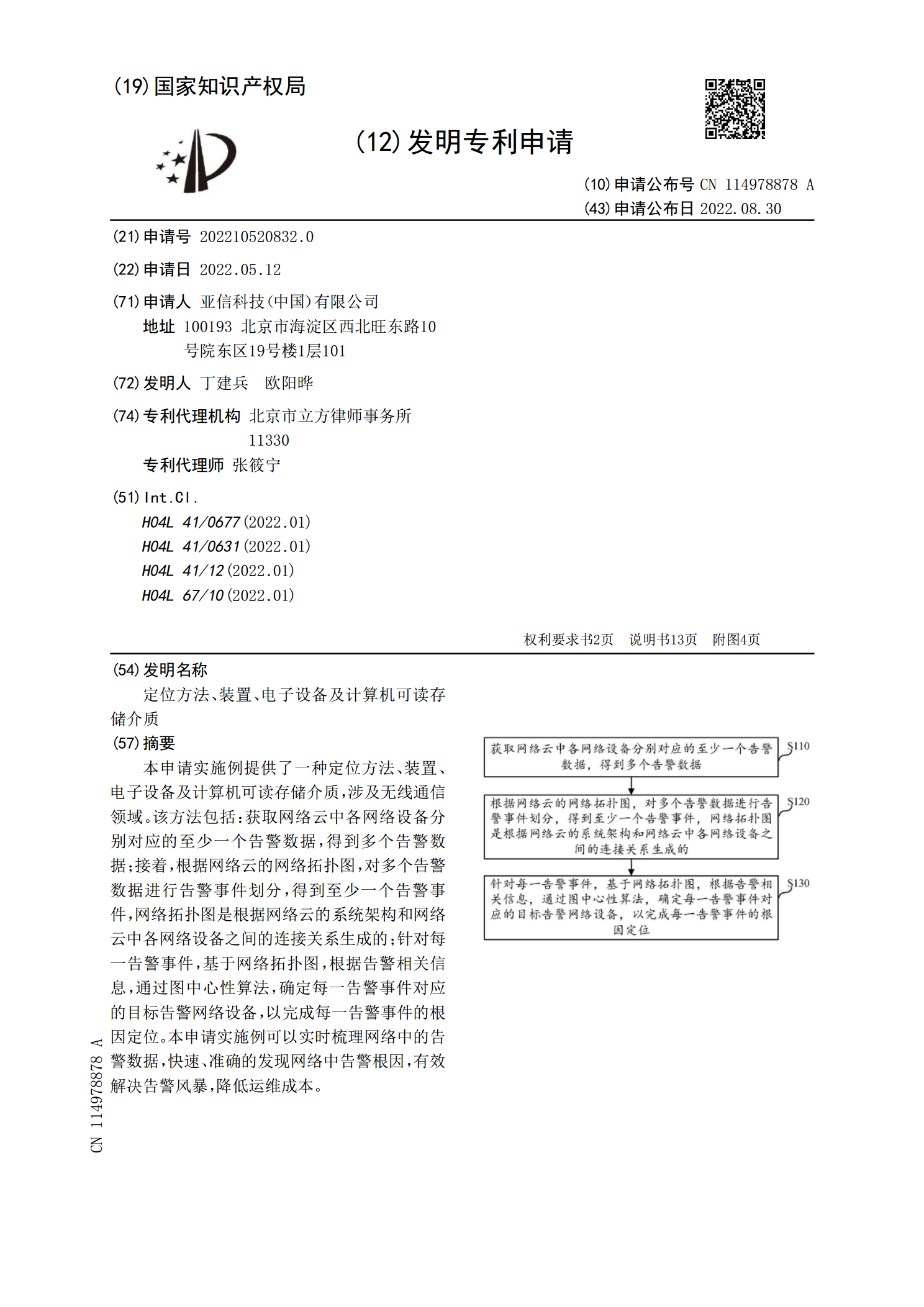
本申请实施例提供了一种定位方法、装置、电子设备及计算机可读存储介质,涉及无线通信领域。该方法包括:获取网络云中各网络设备分别对应的至少一个告警数据,得到多个告警数据;接着,根据网络云的网络拓扑图,对多个告警数据进行告警事件划分,得到至少一个告警事件,网络拓扑图是根据网络云的系统架构和网络云中各网络设备之间的连接关系生成的;针对每一告警事件,基于网络拓扑图,根据告警相关信息,通过图中心性算法,确定每一告警事件对应的目标告警网络设备,以完成每一告警事件的根因定位。本申请实施例可以实时梳理网络中的告警数据,快速
定位方法、装置、电子设备及可读存储介质.pdf
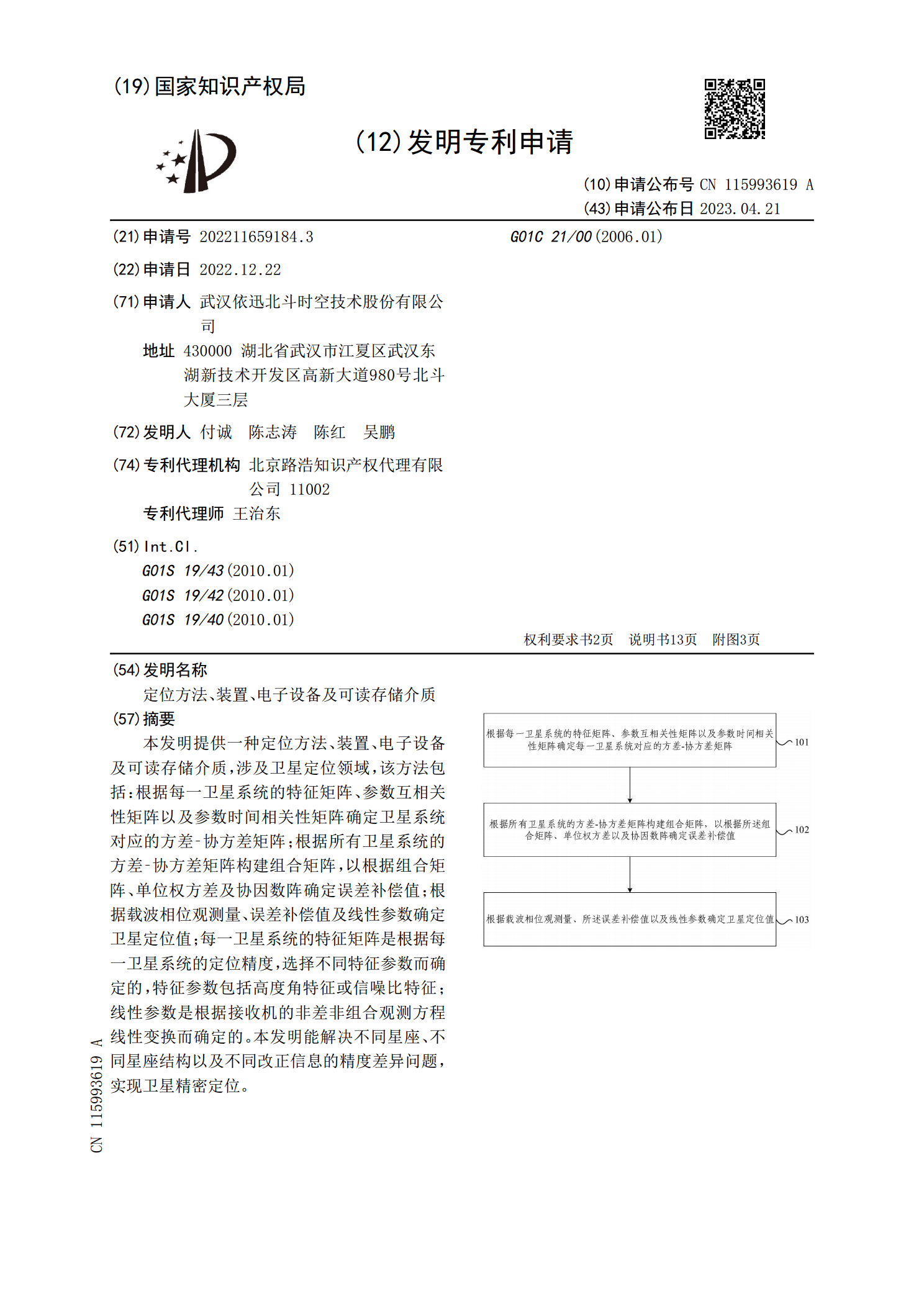
本发明提供一种定位方法、装置、电子设备及可读存储介质,涉及卫星定位领域,该方法包括:根据每一卫星系统的特征矩阵、参数互相关性矩阵以及参数时间相关性矩阵确定卫星系统对应的方差‑协方差矩阵;根据所有卫星系统的方差‑协方差矩阵构建组合矩阵,以根据组合矩阵、单位权方差及协因数阵确定误差补偿值;根据载波相位观测量、误差补偿值及线性参数确定卫星定位值;每一卫星系统的特征矩阵是根据每一卫星系统的定位精度,选择不同特征参数而确定的,特征参数包括高度角特征或信噪比特征;线性参数是根据接收机的非差非组合观测方程线性变换而确定

定位方法、装置、电子设备和计算机可读存储介质.pdf
本申请提出一种定位方法、装置、电子设备和计算机可读存储介质,涉及计算机视觉技术领域,其中,方法包括:获取激光雷达测量得到的点云图,从点云图中提取第一目标区,第一目标区与同步采集的视觉图像中的感兴趣区检测相同对象,根据第一目标区域携带的第一定位信息,确定第一目标区域中各像素点的深度,根据各像素点的深度,统计各设定深度对应的像素点个数指示值,根据像素点个数指示值的峰值,从各设定深度中确定目标深度,实现了通过激光雷达与视觉图像配准,进行对象位置预测,降低了成本,提高了定位准确度,解决现有技术中采用深度传感器进行
定位方法、装置、电子设备和计算机可读存储介质.pdf
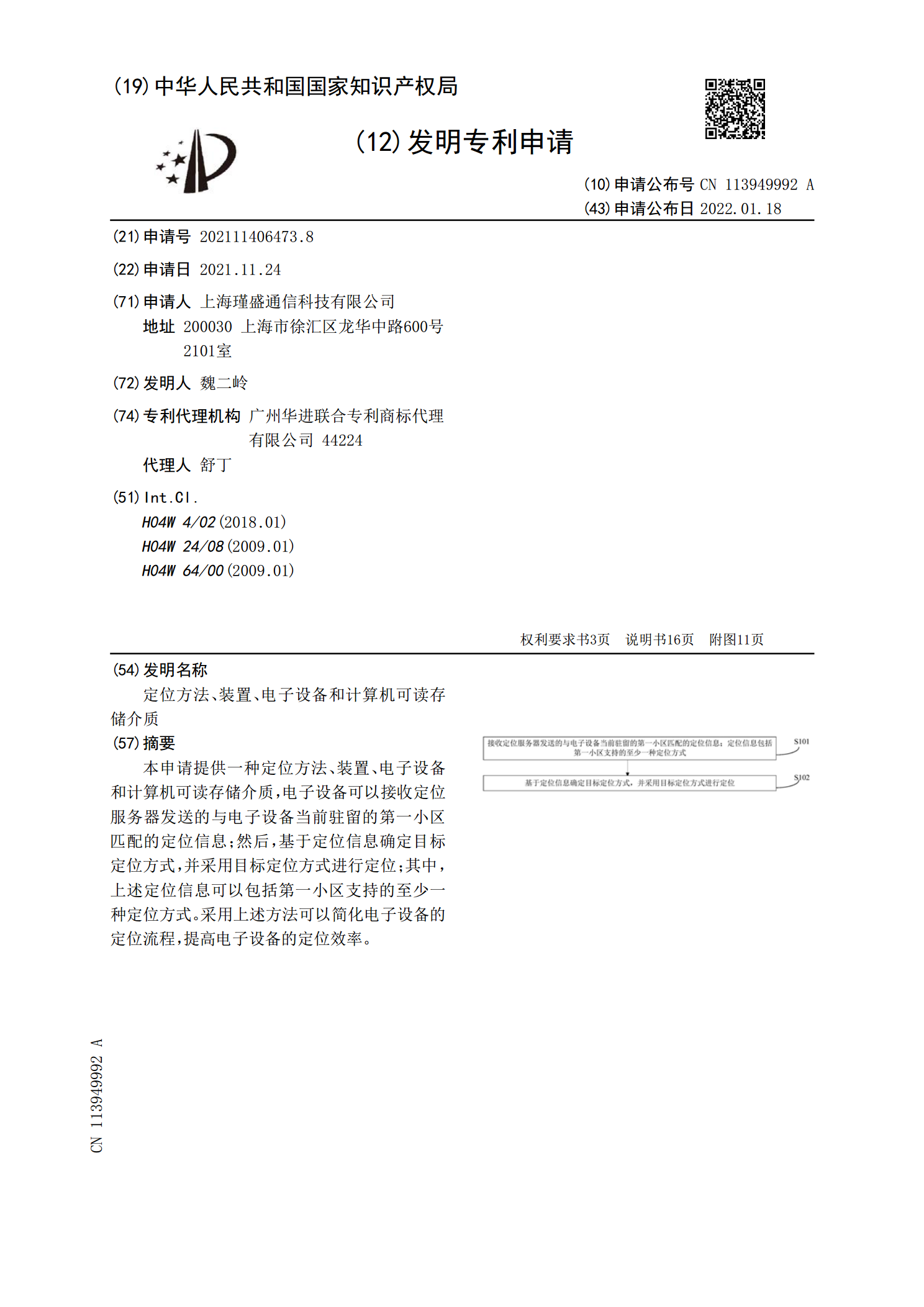
本申请提供一种定位方法、装置、电子设备和计算机可读存储介质,电子设备可以接收定位服务器发送的与电子设备当前驻留的第一小区匹配的定位信息;然后,基于定位信息确定目标定位方式,并采用目标定位方式进行定位;其中,上述定位信息可以包括第一小区支持的至少一种定位方式。采用上述方法可以简化电子设备的定位流程,提高电子设备的定位效率。