
一种基于RGBD相机的货物箱智能装载方法及系统.pdf

玄静****写意


1/10
2/10

3/10
4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于RGBD相机的货物箱智能装载方法及系统.pdf
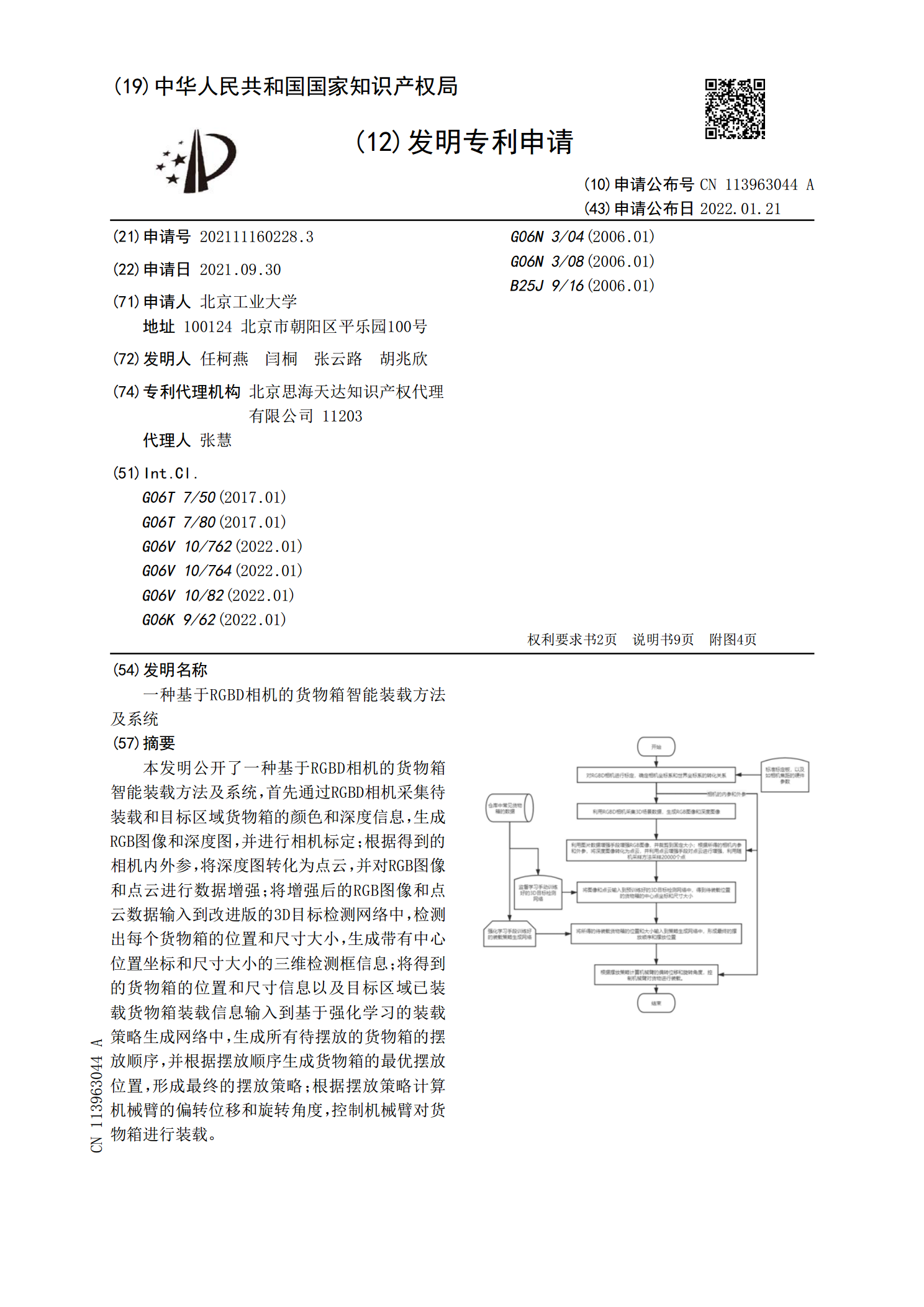
本发明公开了一种基于RGBD相机的货物箱智能装载方法及系统,首先通过RGBD相机采集待装载和目标区域货物箱的颜色和深度信息,生成RGB图像和深度图,并进行相机标定;根据得到的相机内外参,将深度图转化为点云,并对RGB图像和点云进行数据增强;将增强后的RGB图像和点云数据输入到改进版的3D目标检测网络中,检测出每个货物箱的位置和尺寸大小,生成带有中心位置坐标和尺寸大小的三维检测框信息;将得到的货物箱的位置和尺寸信息以及目标区域已装载货物箱装载信息输入到基于强化学习的装载策略生成网络中,生成所有待摆放的货物箱

一种基于双目相机的智能快递箱尺寸测量方法及系统.pdf
本发明实施例公开了一种基于双目相机的智能快递箱尺寸测量方法及系统,采用双目相机实现无接触的测量方式,可实现流水线上的实时测量;通过一系列图像处理算法,可以实时高效地从一张图像中检测出快递箱的长宽高,并且检测精度和鲁棒性高;本方案构建的系统可以以相同的精度测量不同尺寸大小的快递箱尺寸。
一种多源相机系统及RGBD配准方法.pdf
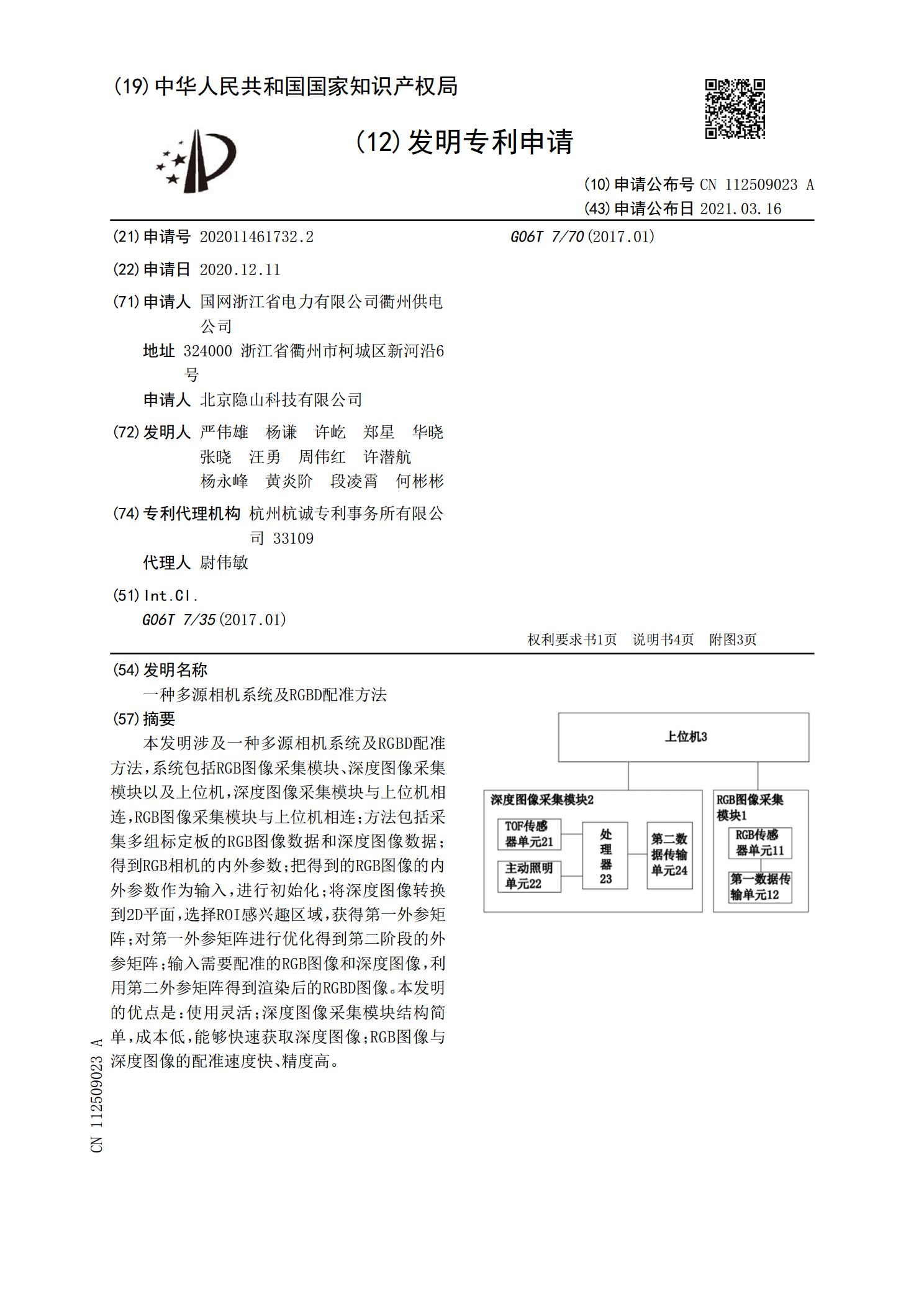
本发明涉及一种多源相机系统及RGBD配准方法,系统包括RGB图像采集模块、深度图像采集模块以及上位机,深度图像采集模块与上位机相连,RGB图像采集模块与上位机相连;方法包括采集多组标定板的RGB图像数据和深度图像数据;得到RGB相机的内外参数;把得到的RGB图像的内外参数作为输入,进行初始化;将深度图像转换到2D平面,选择ROI感兴趣区域,获得第一外参矩阵;对第一外参矩阵进行优化得到第二阶段的外参矩阵;输入需要配准的RGB图像和深度图像,利用第二外参矩阵得到渲染后的RGBD图像。本发明的优点是:使用灵活;

基于RGBD相机的人的检测与跟踪.docx
基于RGBD相机的人的检测与跟踪摘要:RGBD相机作为一种新型的传感器,其在人的检测与跟踪方面具备很大的优势。本文从基本原理入手,介绍了RGBD相机的工作原理和相关技术,然后详细阐述了基于RGBD相机的人的检测和跟踪算法,从特征提取、分类器优化和运动估计等方面进行了全面的探讨。最后,本文提出了一些值得深入研究的方向,为后续研究提供了一定的借鉴和参考。关键词:RGBD相机;人的检测与跟踪;特征提取;分类器优化;运动估计一、引言人的检测与跟踪技术是计算机视觉领域中的一个重要研究方向,其在智能监控、自动驾驶、增
基于RGBD相机结合HED神经网络的镜子定位方法及系统.pdf
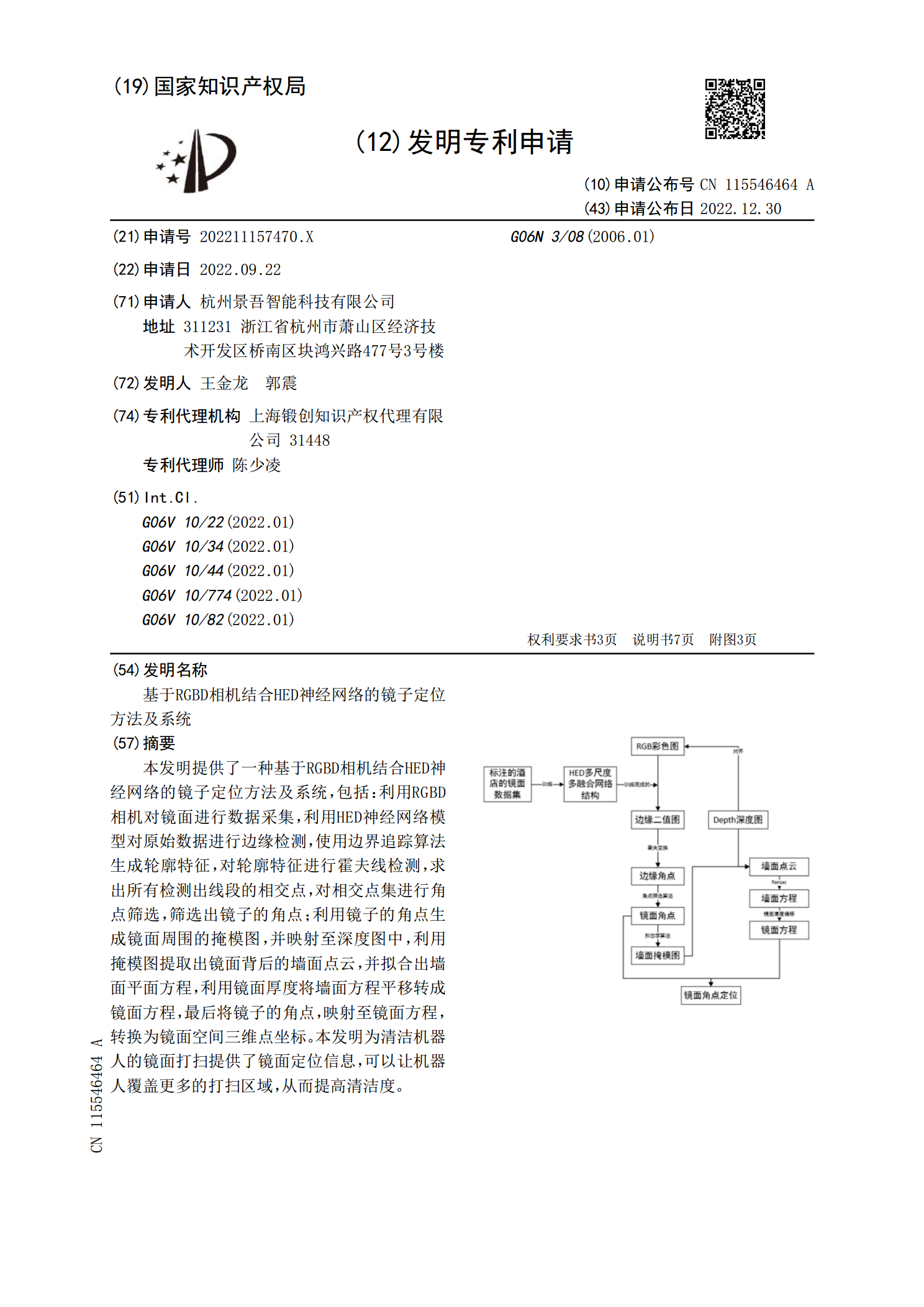
本发明提供了一种基于RGBD相机结合HED神经网络的镜子定位方法及系统,包括:利用RGBD相机对镜面进行数据采集,利用HED神经网络模型对原始数据进行边缘检测,使用边界追踪算法生成轮廓特征,对轮廓特征进行霍夫线检测,求出所有检测出线段的相交点,对相交点集进行角点筛选,筛选出镜子的角点;利用镜子的角点生成镜面周围的掩模图,并映射至深度图中,利用掩模图提取出镜面背后的墙面点云,并拟合出墙面平面方程,利用镜面厚度将墙面方程平移转成镜面方程,最后将镜子的角点,映射至镜面方程,转换为镜面空间三维点坐标。本发明为清洁