
一种多源相机系统及RGBD配准方法.pdf

沛芹****ng


1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种多源相机系统及RGBD配准方法.pdf
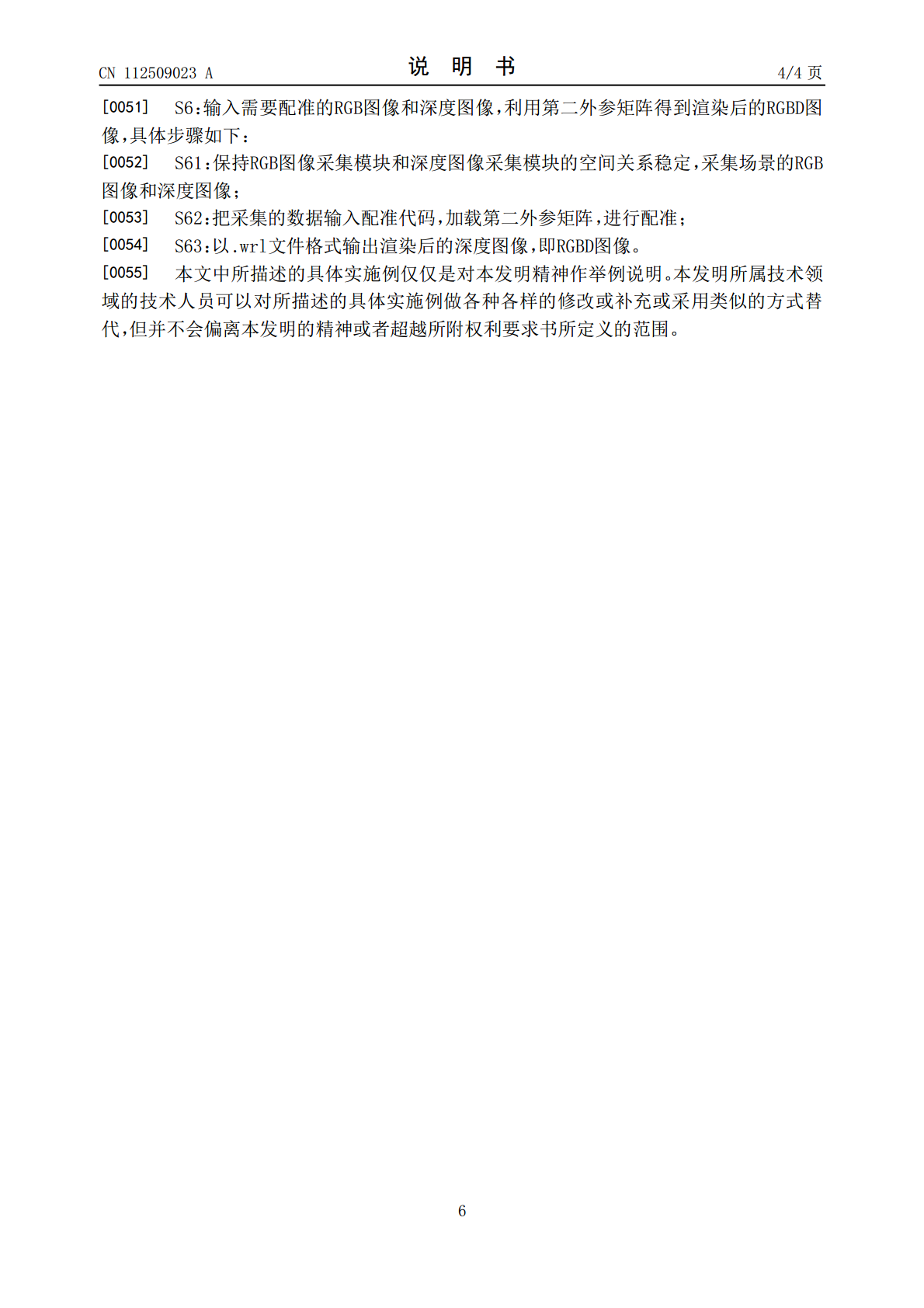
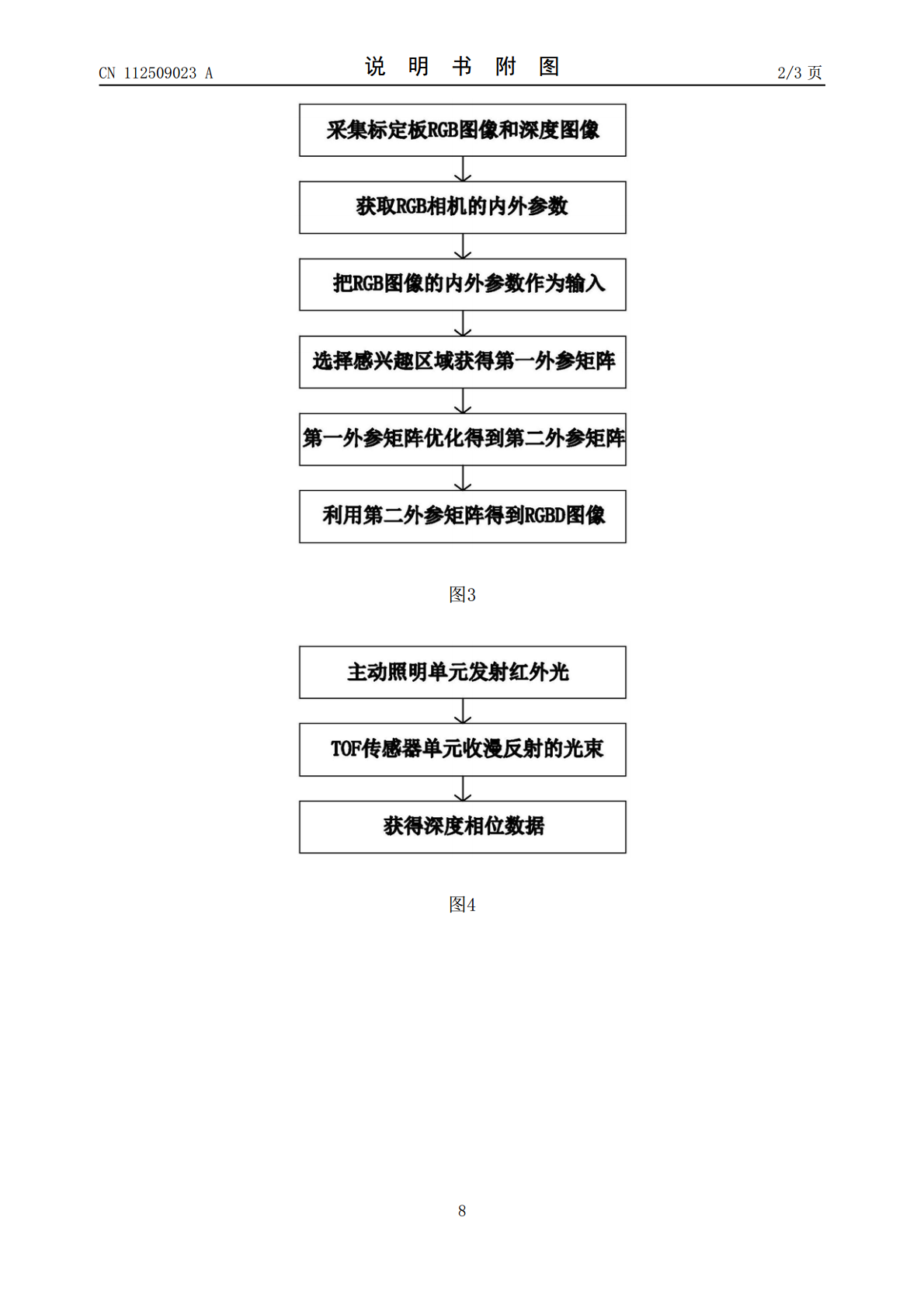
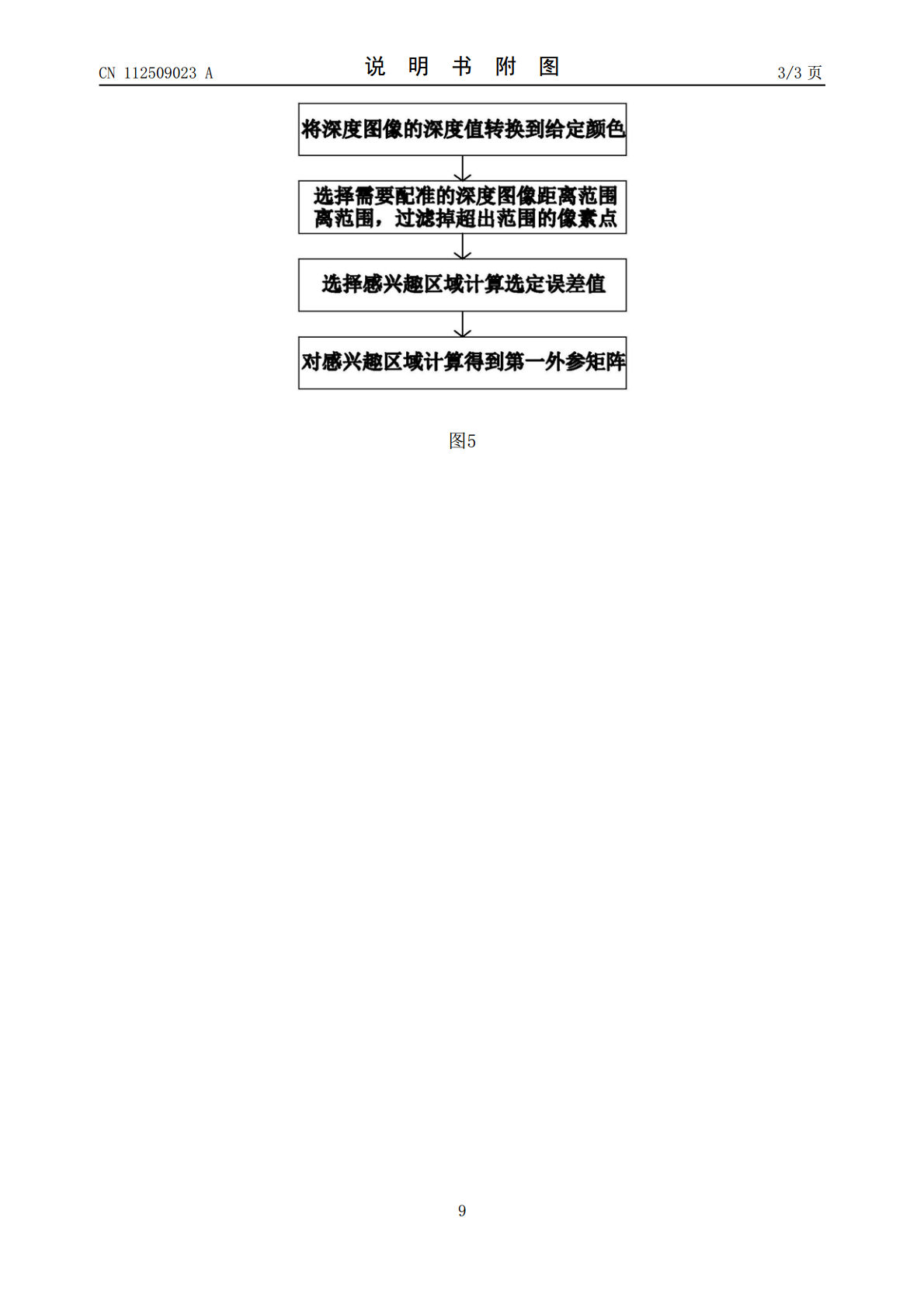
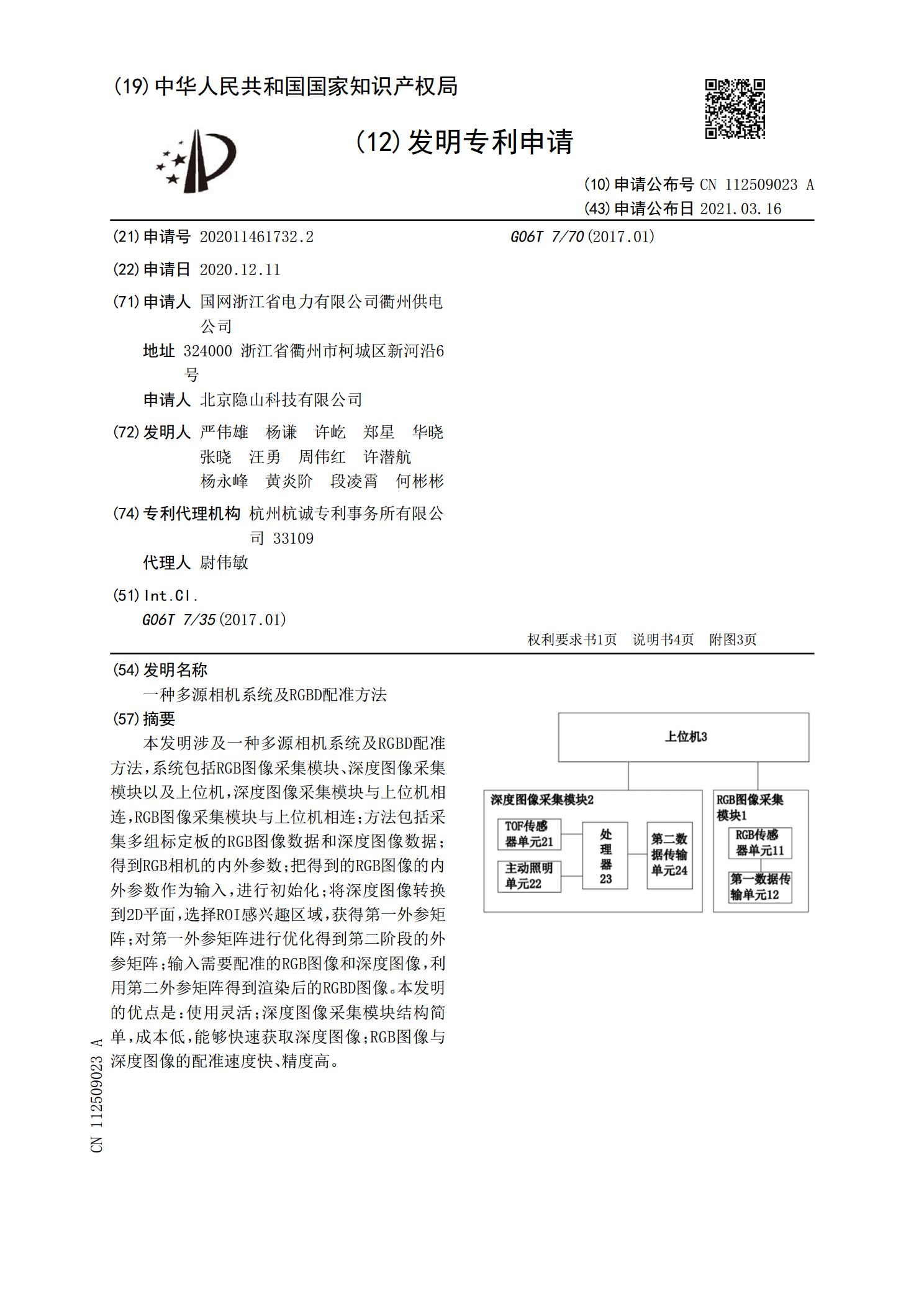
本发明涉及一种多源相机系统及RGBD配准方法,系统包括RGB图像采集模块、深度图像采集模块以及上位机,深度图像采集模块与上位机相连,RGB图像采集模块与上位机相连;方法包括采集多组标定板的RGB图像数据和深度图像数据;得到RGB相机的内外参数;把得到的RGB图像的内外参数作为输入,进行初始化;将深度图像转换到2D平面,选择ROI感兴趣区域,获得第一外参矩阵;对第一外参矩阵进行优化得到第二阶段的外参矩阵;输入需要配准的RGB图像和深度图像,利用第二外参矩阵得到渲染后的RGBD图像。本发明的优点是:使用灵活;
一种基于多源图像配准的雷击路径监测系统及方法.pdf
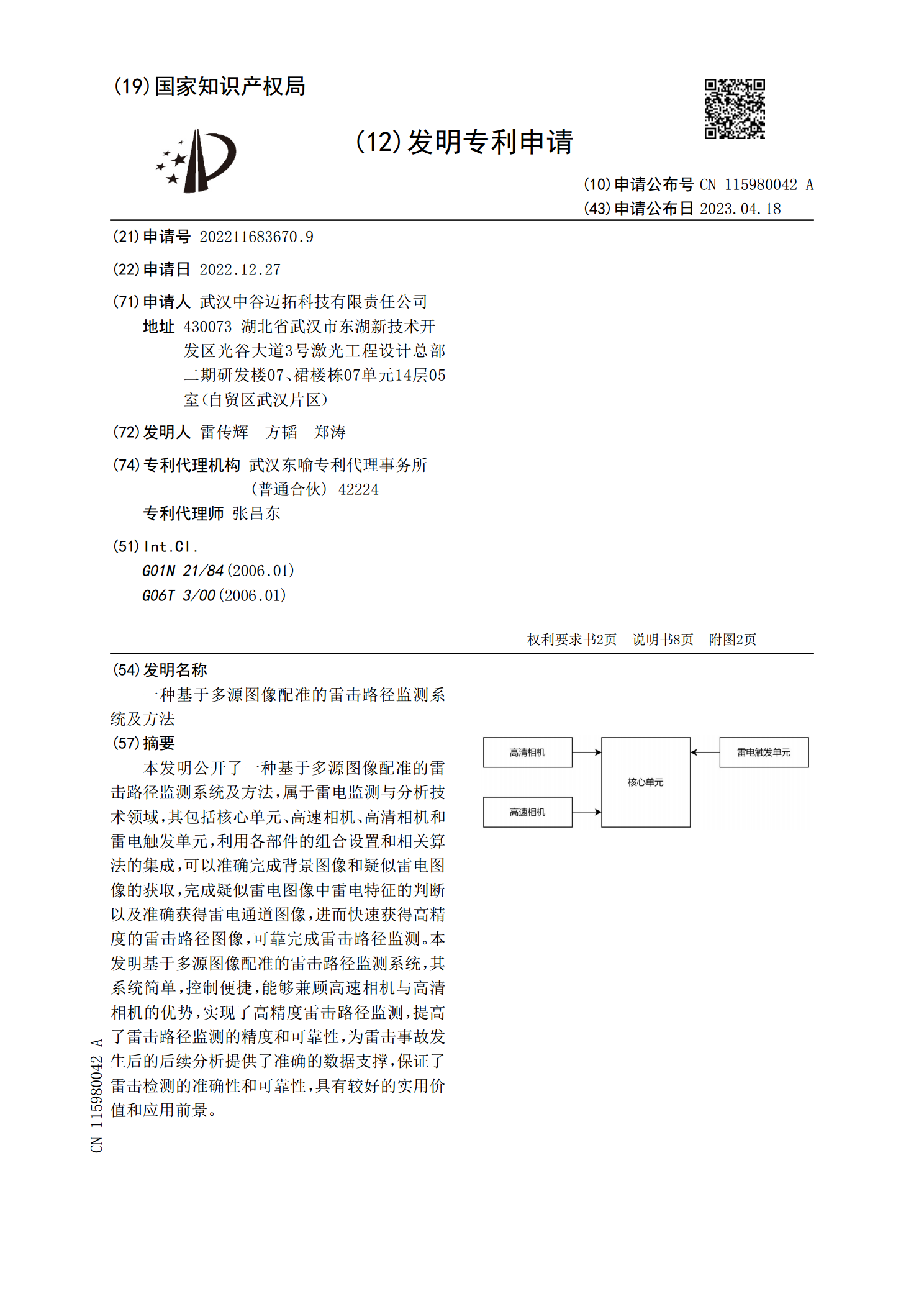
本发明公开了一种基于多源图像配准的雷击路径监测系统及方法,属于雷电监测与分析技术领域,其包括核心单元、高速相机、高清相机和雷电触发单元,利用各部件的组合设置和相关算法的集成,可以准确完成背景图像和疑似雷电图像的获取,完成疑似雷电图像中雷电特征的判断以及准确获得雷电通道图像,进而快速获得高精度的雷击路径图像,可靠完成雷击路径监测。本发明基于多源图像配准的雷击路径监测系统,其系统简单,控制便捷,能够兼顾高速相机与高清相机的优势,实现了高精度雷击路径监测,提高了雷击路径监测的精度和可靠性,为雷击事故发生后的后续
一种面阵相机与结构光相机采集图像配准方法.pdf
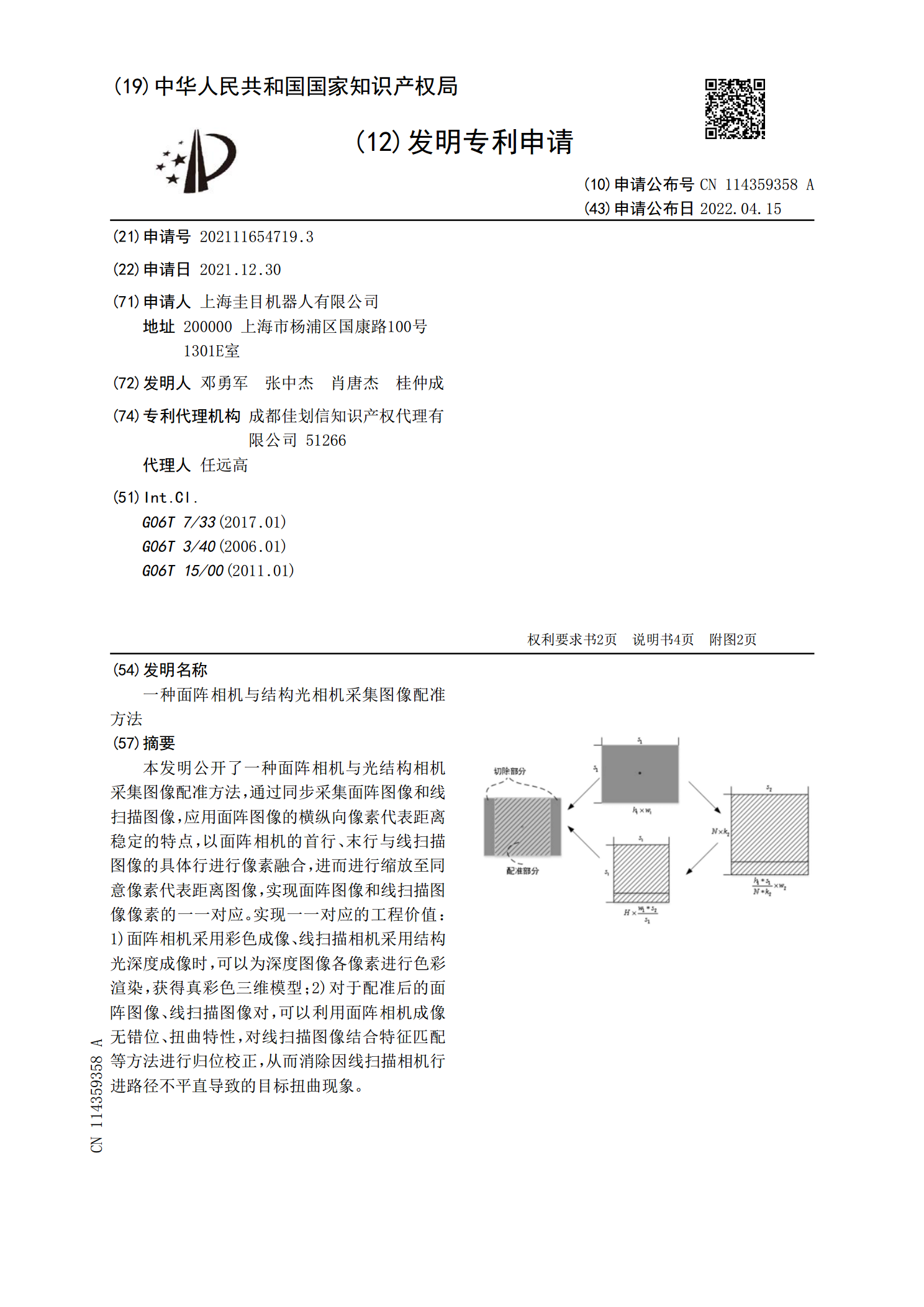
本发明公开了一种面阵相机与光结构相机采集图像配准方法,通过同步采集面阵图像和线扫描图像,应用面阵图像的横纵向像素代表距离稳定的特点,以面阵相机的首行、末行与线扫描图像的具体行进行像素融合,进而进行缩放至同意像素代表距离图像,实现面阵图像和线扫描图像像素的一一对应。实现一一对应的工程价值:1)面阵相机采用彩色成像、线扫描相机采用结构光深度成像时,可以为深度图像各像素进行色彩渲染,获得真彩色三维模型;2)对于配准后的面阵图像、线扫描图像对,可以利用面阵相机成像无错位、扭曲特性,对线扫描图像结合特征匹配等方法进
一种基于区域特征的多源异类图像配准方法.pdf
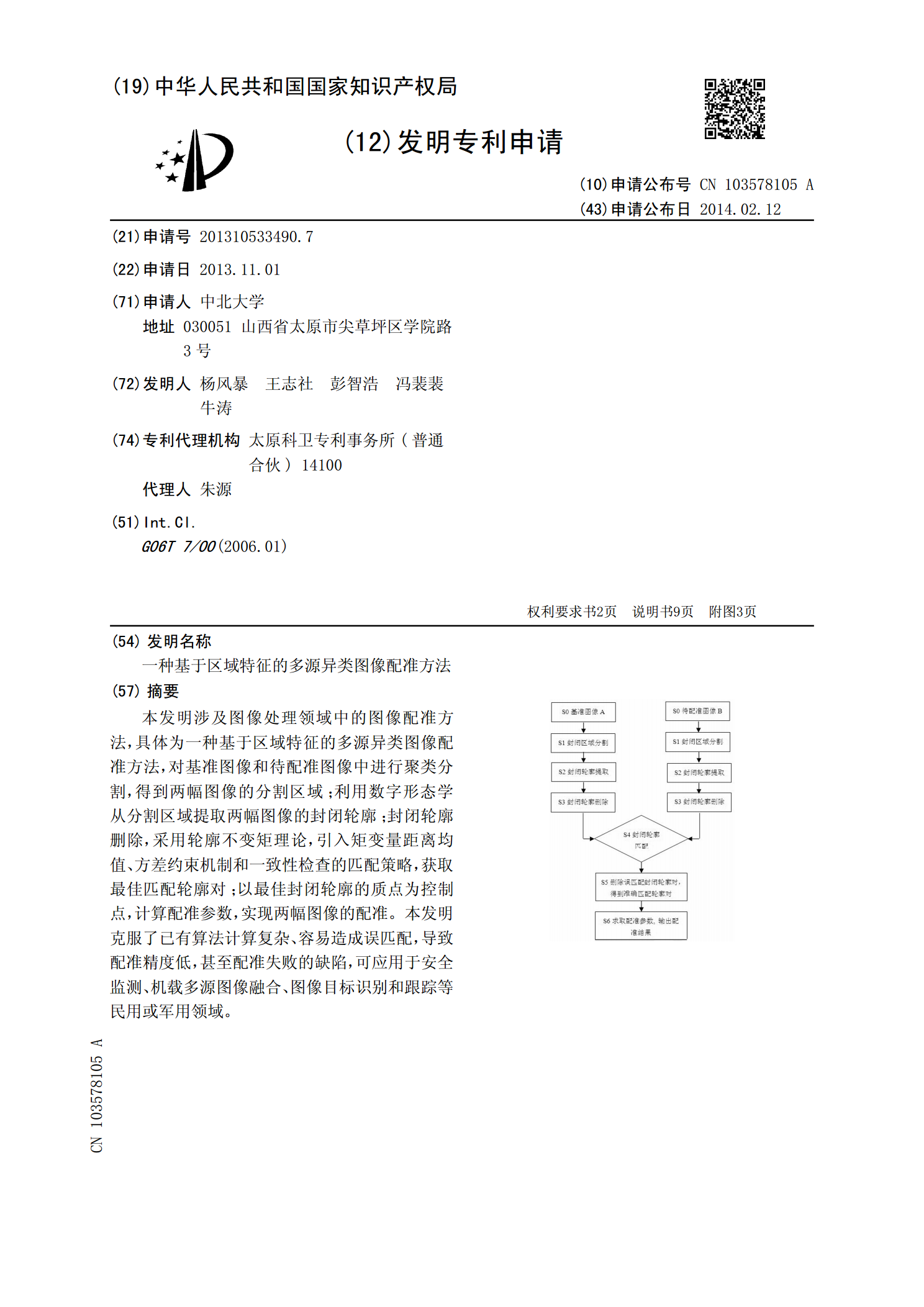
本发明涉及图像处理领域中的图像配准方法,具体为一种基于区域特征的多源异类图像配准方法,对基准图像和待配准图像中进行聚类分割,得到两幅图像的分割区域;利用数字形态学从分割区域提取两幅图像的封闭轮廓;封闭轮廓删除,采用轮廓不变矩理论,引入矩变量距离均值、方差约束机制和一致性检查的匹配策略,获取最佳匹配轮廓对;以最佳封闭轮廓的质点为控制点,计算配准参数,实现两幅图像的配准。本发明克服了已有算法计算复杂、容易造成误匹配,导致配准精度低,甚至配准失败的缺陷,可应用于安全监测、机载多源图像融合、图像目标识别和跟踪等民
一种基于RGBD相机的货物箱智能装载方法及系统.pdf
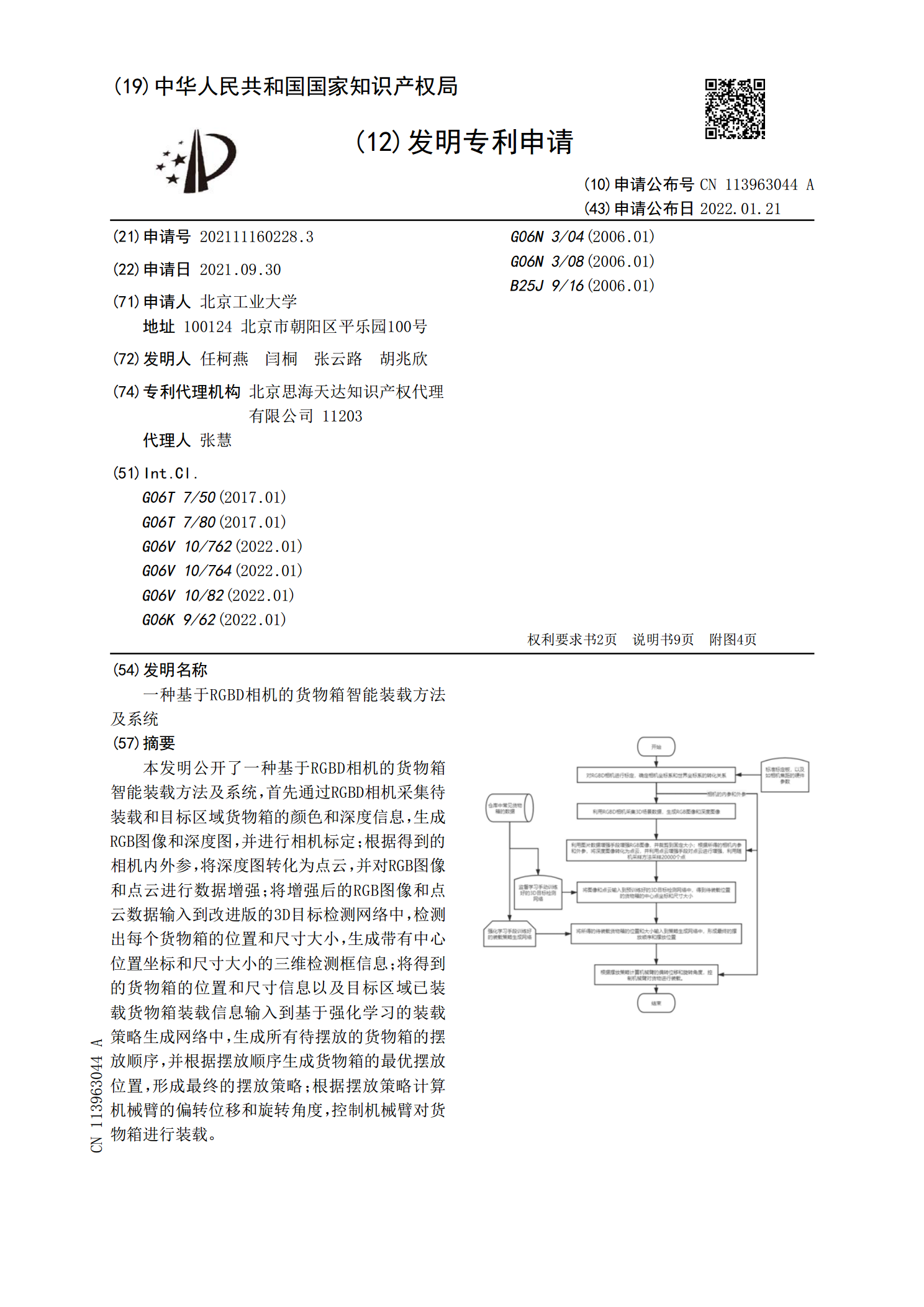
本发明公开了一种基于RGBD相机的货物箱智能装载方法及系统,首先通过RGBD相机采集待装载和目标区域货物箱的颜色和深度信息,生成RGB图像和深度图,并进行相机标定;根据得到的相机内外参,将深度图转化为点云,并对RGB图像和点云进行数据增强;将增强后的RGB图像和点云数据输入到改进版的3D目标检测网络中,检测出每个货物箱的位置和尺寸大小,生成带有中心位置坐标和尺寸大小的三维检测框信息;将得到的货物箱的位置和尺寸信息以及目标区域已装载货物箱装载信息输入到基于强化学习的装载策略生成网络中,生成所有待摆放的货物箱