
带有能量优化的水下游动机械臂轨迹跟踪控制方法及装置.pdf

文宣****66


1/10
2/10

3/10
4/10
5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
带有能量优化的水下游动机械臂轨迹跟踪控制方法及装置.pdf
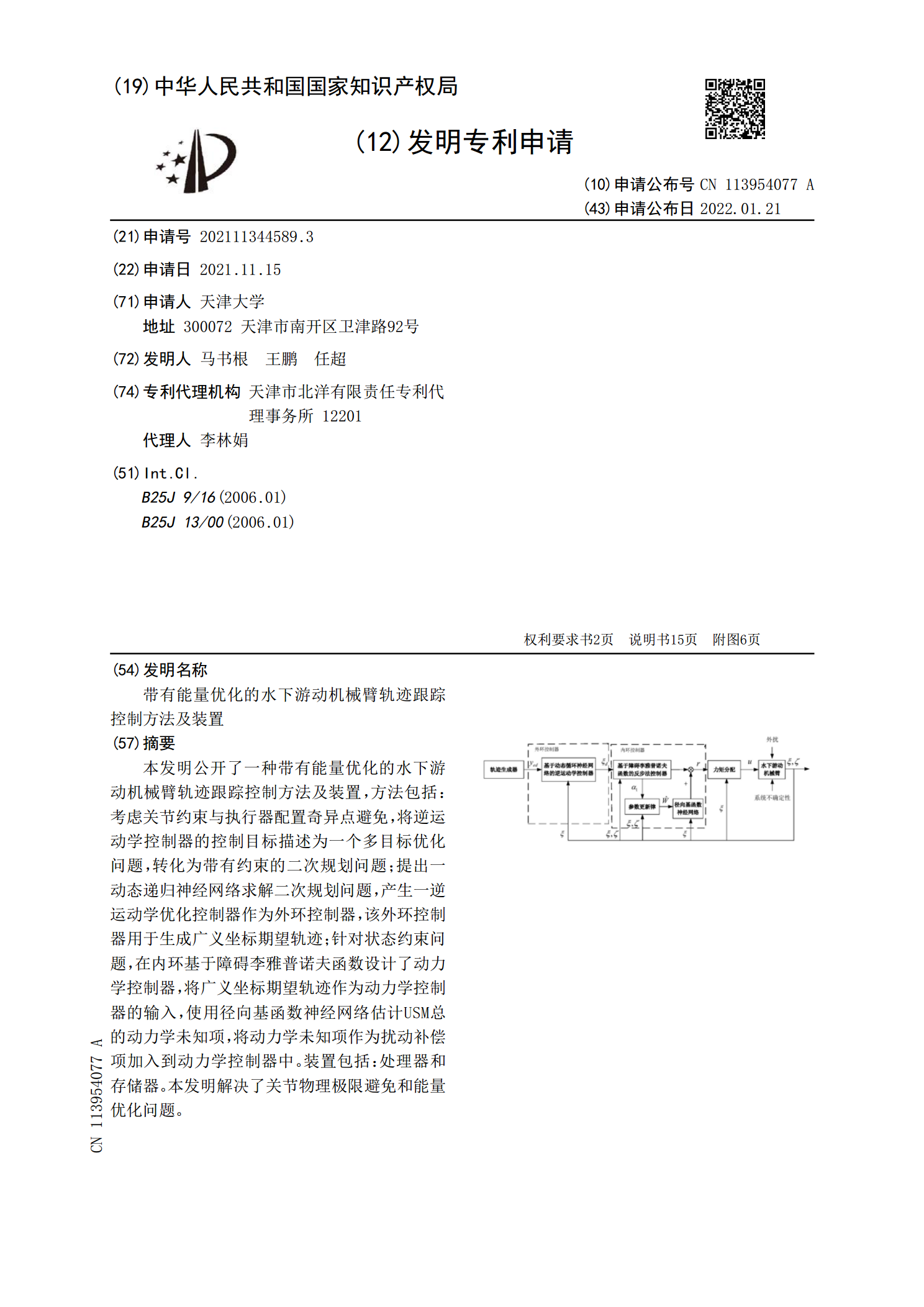
本发明公开了一种带有能量优化的水下游动机械臂轨迹跟踪控制方法及装置,方法包括:考虑关节约束与执行器配置奇异点避免,将逆运动学控制器的控制目标描述为一个多目标优化问题,转化为带有约束的二次规划问题;提出一动态递归神经网络求解二次规划问题,产生一逆运动学优化控制器作为外环控制器,该外环控制器用于生成广义坐标期望轨迹;针对状态约束问题,在内环基于障碍李雅普诺夫函数设计了动力学控制器,将广义坐标期望轨迹作为动力学控制器的输入,使用径向基函数神经网络估计USM总的动力学未知项,将动力学未知项作为扰动补偿项加入到动力

水下机械臂运动空间分析与轨迹跟踪算法优化.docx
水下机械臂运动空间分析与轨迹跟踪算法优化水下机械臂是一种用于海底工作的关节式机械结构。它具有灵活的运动能力和自主性,可以在水下环境中执行各种任务,如潜水作业、海底科学研究、深海勘探等。在水下机械臂的设计和控制中,运动空间分析和轨迹跟踪算法是两个关键的方面。本文将对水下机械臂的运动空间分析和轨迹跟踪算法进行优化研究。1.水下机械臂的运动空间分析水下机械臂的运动空间分析是指对机械臂在三维空间中的运动范围进行分析和约束。由于水下环境的特殊性,机械臂需要考虑到水流、浮力等因素对运动的影响。因此,需要对水下机械臂进

机械臂轨迹跟踪优化控制论文.docx
机械臂轨迹跟踪优化控制论文机械臂轨迹跟踪优化控制论文1引言滑模变结构控制方法比较适合于机械臂的控制。这主要是因为滑模变结构控制对一类有外界干扰和参数变化具备某种不变性,或称完全鲁棒性,这对于机械臂的控制非常有利,它可以削弱由于负载变化或随机干扰对系统控制性能的影响。但是,滑模控制作为一种不连续的控制方法,不可避免地会引起系统的“抖振”问题。抖振及其削弱问题是研究变结构控制的主要内容之一,因为一方面它将引起稳态误差,从而大大影响变结构系统的品质;另一方面它不停地消耗系统的能量,并可能激发系统的振荡[1]。趋

伸缩因子优化机械臂轨迹跟踪控制的误差分析.docx
伸缩因子优化机械臂轨迹跟踪控制的误差分析伸缩因子优化机械臂轨迹跟踪控制的误差分析摘要:随着工业自动化的快速发展,机械臂在生产和制造领域中发挥着关键作用。在机械臂轨迹跟踪控制中,准确的位置和姿态控制是至关重要的。然而,由于机械臂的结构和动力学特性,在实际应用中往往存在一定的误差。本文提出了一种使用伸缩因子优化机械臂轨迹跟踪控制的方法,以减少误差并提高控制精度。通过对机械臂系统进行建模和估计误差分析,我们证明了伸缩因子优化方法在提高轨迹跟踪精度方面的有效性。关键词:机械臂,轨迹跟踪,控制精度,伸缩因子1.引言

基于鲁棒控制的机械臂轨迹跟踪控制方法研究.docx
基于鲁棒控制的机械臂轨迹跟踪控制方法研究基于鲁棒控制的机械臂轨迹跟踪控制方法研究摘要:机械臂的轨迹跟踪控制是机器人研究领域的重要问题之一。传统的控制方法存在着对不确定因素和外部干扰的鲁棒性较差的问题,为了提高机械臂的轨迹跟踪性能,本文提出了一种基于鲁棒控制的机械臂轨迹跟踪控制方法。该方法通过引入鲁棒控制器,能够有效地处理系统模型误差和未知外部干扰,保证了机械臂的轨迹跟踪性能。关键词:机械臂;轨迹跟踪;鲁棒控制1.引言机械臂是一种重要的工业自动化装置,广泛应用于生产线上的物料搬运、精密装配等工业领域。机械臂