
一种增强ID重识别的无锚多目标跟踪方法.pdf

景福****90


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种增强ID重识别的无锚多目标跟踪方法.pdf
本发明提供一种增强ID重识别的无锚多目标跟踪方法,属于目标跟踪领域。本发明通过预测目标中心点热力图来检测目标位置,并设计检测偏差损失加强对预测热力图响应值的约束,以提高检测精度,缓解因定位不准确导致的Re‑ID特征模糊问题。其次,为增强Re‑ID鲁棒性,提出Re‑ID可学习特征动态扩充策略。该策略通过自适应增加目标中心的Re‑ID可学习特征来提高特征质量,并减小Re‑ID对中心点检测精度的依赖。最后在MOT16和MOT17测试集上进行验证,结果表明,算法能有效提升检测和Re‑ID性能,与主流算法相比具有更
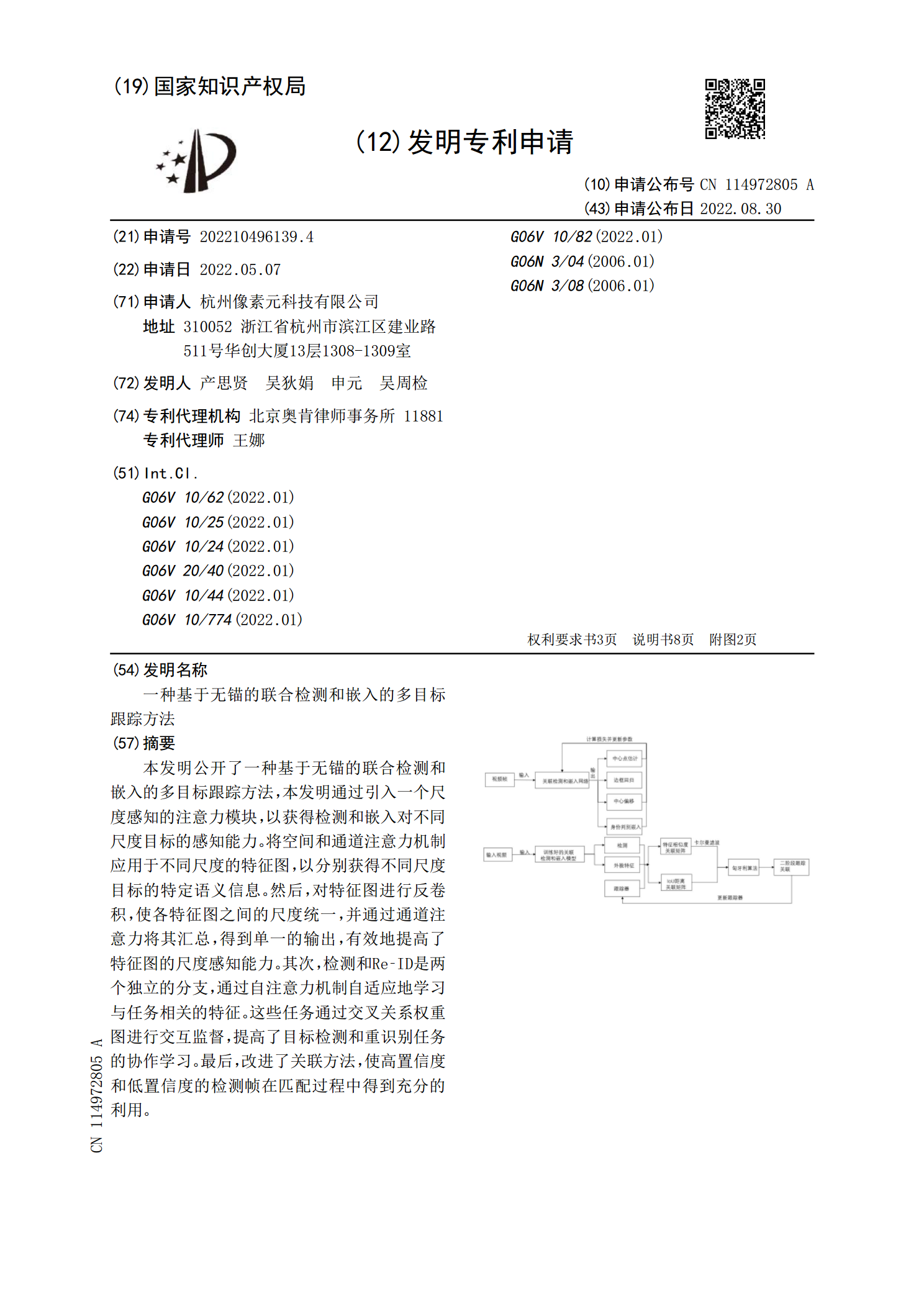
一种基于无锚的联合检测和嵌入的多目标跟踪方法.pdf
本发明公开了一种基于无锚的联合检测和嵌入的多目标跟踪方法,本发明通过引入一个尺度感知的注意力模块,以获得检测和嵌入对不同尺度目标的感知能力。将空间和通道注意力机制应用于不同尺度的特征图,以分别获得不同尺度目标的特定语义信息。然后,对特征图进行反卷积,使各特征图之间的尺度统一,并通过通道注意力将其汇总,得到单一的输出,有效地提高了特征图的尺度感知能力。其次,检测和Re‑ID是两个独立的分支,通过自注意力机制自适应地学习与任务相关的特征。这些任务通过交叉关系权重图进行交互监督,提高了目标检测和重识别任务的协作

一种无标记的增强现实多目标注册跟踪方法.pdf
本发明公开了一种无标记的增强现实多目标注册跟踪方法,包括:1)离线阶段:通过分层k‑means聚类出词汇树模型,并为词汇树所有叶子节点的倒排索引注册对应的图像id,最后根据整棵树的叶子结点出现的频数和总共的待注册图像数更新为一棵带tf‑idf的词汇树;2)在线阶段:在线阶段是一个实时响应的系统,对摄像头实时输入的图像,根据训练好的词汇树,检索出最相似的图像,随后通过相机的位姿估计计算出待加载的3D物体初始位姿,并采用KLT的跟踪算法对此目标的运动进行跟踪,最后通过渲染线程搭建各目标的增强现实场景。本发明为

一种基于目标重跟踪的多目标粒子滤波检测前跟踪方法.pdf
本发明公开了一种基于目标重跟踪的多目标粒子滤波检测前跟踪方法,该方法在跟踪环节中,对已经跟踪完成且pb大于给定阈值的目标,按粒子权重值大小对跟踪粒子群按逆序进行排序,计算其前N/50个粒子的状态均值。以此状态均值为中心点,产生新的粒子,对跟踪粒子群的后0.98*N个粒子状态信息进行替换,粒子群存在值全置为1,保留了优质粒子,更新了粒子群,提高了粒子使用率,使跟踪点迹较快靠近真实目标,提高了目标的跟踪精度。此外,使虚假点迹更快接近真实目标,通过计算目标踪航迹长度len
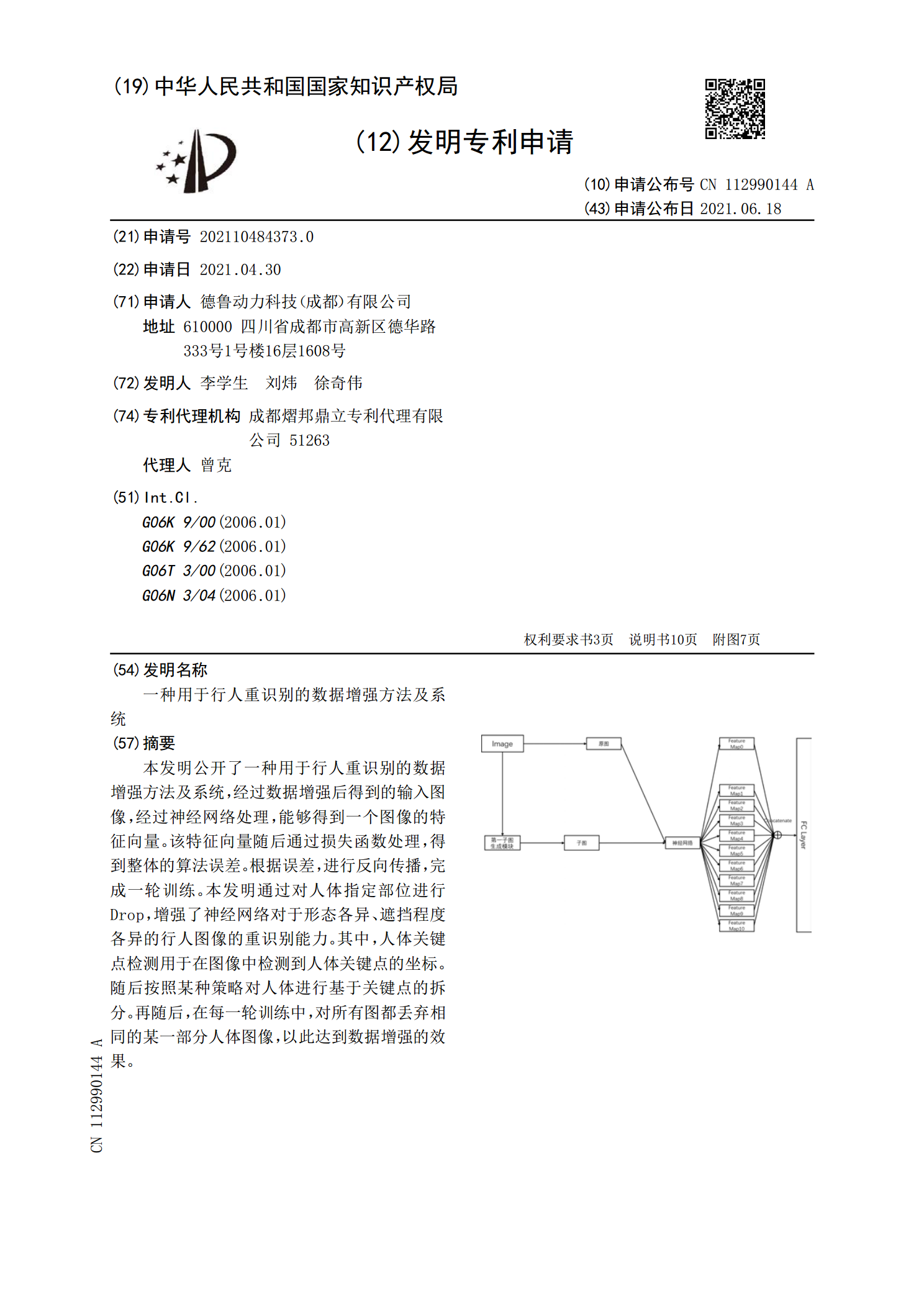
一种用于行人重识别的数据增强方法及系统.pdf
本发明公开了一种用于行人重识别的数据增强方法及系统,经过数据增强后得到的输入图像,经过神经网络处理,能够得到一个图像的特征向量。该特征向量随后通过损失函数处理,得到整体的算法误差。根据误差,进行反向传播,完成一轮训练。本发明通过对人体指定部位进行Drop,增强了神经网络对于形态各异、遮挡程度各异的行人图像的重识别能力。其中,人体关键点检测用于在图像中检测到人体关键点的坐标。随后按照某种策略对人体进行基于关键点的拆分。再随后,在每一轮训练中,对所有图都丢弃相同的某一部分人体图像,以此达到数据增强的效果。