
识别目标的方法、装置和计算可读存储介质.pdf

猫巷****提格


1/10
2/10
3/10
4/10

5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

识别目标的方法、装置和计算可读存储介质.pdf
本申请涉及一种识别目标的方法、装置和计算可读存储介质。该方法包括:获取图像传感器采集的行驶环境图像和雷达扫描得到的探测数据;将行驶环境图像、毫米波雷达数据和点云数据进行时空对齐;根据时空对齐后的毫米波雷达数据,生成3D感兴趣区域;采用已训练神经网络,分别生成点云数据对应的第一特征图和行驶环境图像对应的第二特征图;将3D感兴趣区域投影至第一特征图和第二特征图,得到3D感兴趣区域的投影感兴趣区域;对投影感兴趣区域、第一特征图和第二特征图进行融合,识别行驶环境图像中的目标。本申请提供的方案,能够以较高的精度识别

音频识别方法、装置和计算机可读存储介质.pdf
提供了音频识别方法、装置和计算机可读存储介质。方法可以由包括云服务器的计算机设备执行,并且包括:提取待识别音频文件的音频特征;待识别音频文件进行分段,得到多个音频时间片,并基于每个音频时间片内的音频的事件类别以及所述事件类别与预设目标事件的相关性,确定与音频时间片关联的音频特征的权重;基于待识别音频文件的音频特征得到多个音频特征分段,其中每个音频特征分段对应至少一个时间片;将每个音频特征分段与音频特征组合库进行特征匹配,并基于至少一个音频时间片中的音频特征以及与其关联的权重,得到所述音频特征分段的匹配音频

样本信息识别方法、计算机可读存储介质和识别装置.pdf
本发明公开了一种样本信息识别方法、计算机可读存储介质和识别装置,该样本信息识别方法包括控制运输导轨运输样本管至第一识别区域,通过样本管信息读取机构获取样本管信息;控制识别机构对所述样本管进行拍摄获取第一图像信息;解析所述第一图像信息,获取第一识别信息;将所述第一识别信息与所述样本管信息进行比对;若所述第一识别信息与所述样本管信息匹配,则根据所述第一识别信息调整机械手位置以夹取所述样本管并将所述样本管移动至第二识别区域;获取位于所述第二识别区域的所述样本管的样本信息。根据样本信息可以得到样本管内的血液样品是
检测移动目标的方法、装置和计算机可读存储介质.pdf
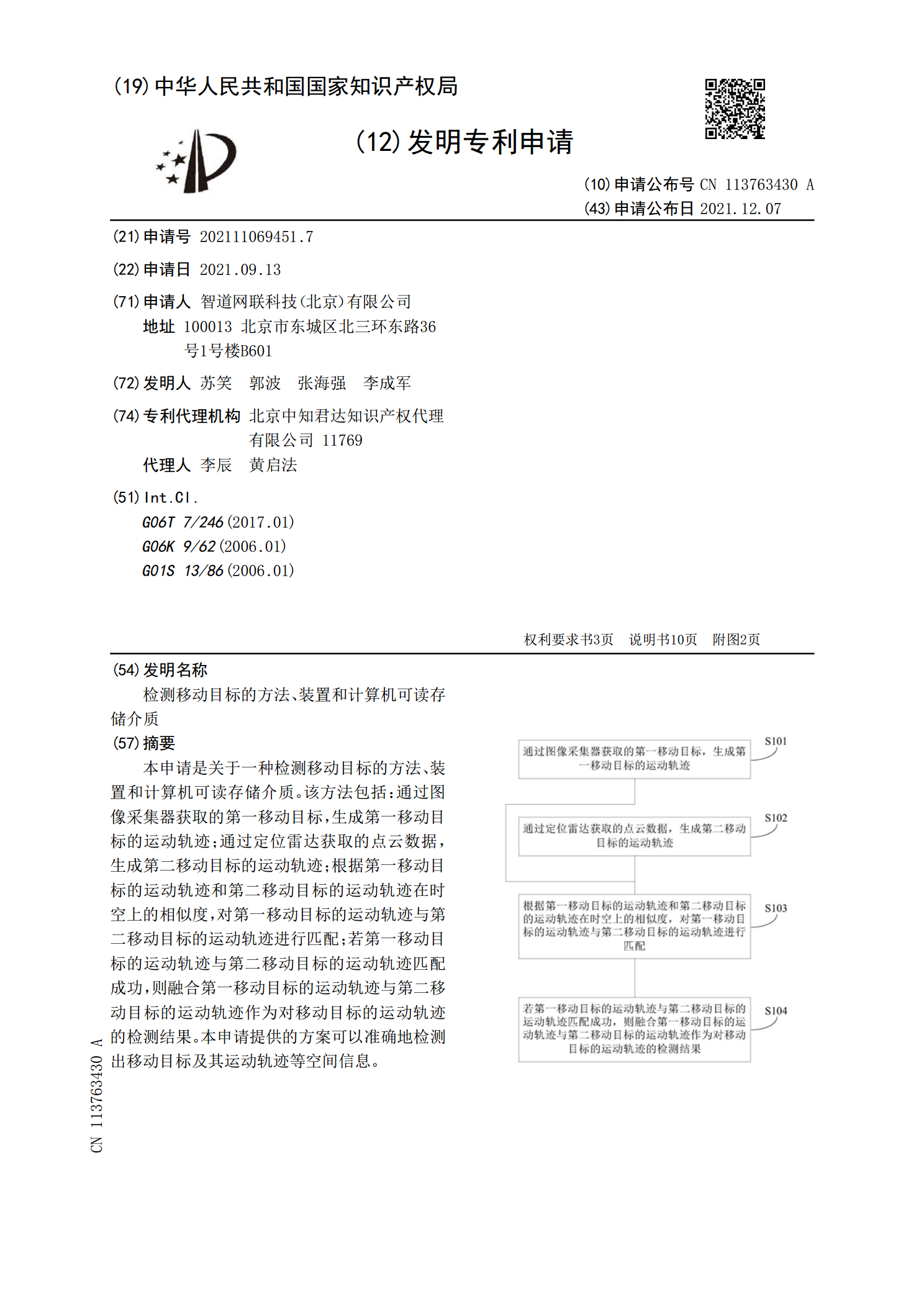
本申请是关于一种检测移动目标的方法、装置和计算机可读存储介质。该方法包括:通过图像采集器获取的第一移动目标,生成第一移动目标的运动轨迹;通过定位雷达获取的点云数据,生成第二移动目标的运动轨迹;根据第一移动目标的运动轨迹和第二移动目标的运动轨迹在时空上的相似度,对第一移动目标的运动轨迹与第二移动目标的运动轨迹进行匹配;若第一移动目标的运动轨迹与第二移动目标的运动轨迹匹配成功,则融合第一移动目标的运动轨迹与第二移动目标的运动轨迹作为对移动目标的运动轨迹的检测结果。本申请提供的方案可以准确地检测出移动目标及其运

虹膜识别方法、电子装置和计算机可读存储介质.pdf
本发明公开了一种虹膜识别方法,用于电子装置。电子装置包括虹膜识别模组和运动传感器,虹膜识别模组包括红外摄像头。虹膜识别方法包括:通过运动传感器检测电子装置的运动信息;在电子装置的运动信息满足预设条件时通过红外摄像头拍摄用户图像;在判断用户图像中存在人脸轮廓时通过虹膜识别模组进行虹膜识别。本发明还公开一种电子装置和计算机可读存储介质。本发明实施方式的虹膜识别方法、电子装置和计算机可读存储介质通过运动传感器检测电子装置的运动以触发红外摄像头开启,并在红外摄像头拍摄到用户人脸轮廓时快速开启虹膜识别模组以进行虹膜