
一种轨迹规划方法、装置、存储介质及电子设备.pdf

fa****楠吖

1/10
2/10

3/10
4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
轨迹规划方法、装置、电子设备及存储介质.pdf
本申请提供一种轨迹规划方法、装置、电子设备及存储介质,涉及运动控制技术领域。该方法包括:根据目标对象当前时刻的运动状态信息,采用预先训练得到的目标轨迹模型,生成目标对象的初始预估运动状态信息;根据目标对象的初始预估运动状态信息,采用模型预测控制算法,调整预估运动状态信息,得到目标对象的目标运动状态信息,目标对象的运动轨迹由至少两个连续时刻的目标运动状态信息构成。通过训练的目标轨迹模型生成初始预估运动状态信息,由于目标轨迹模型是根据样本对象的历史轨迹数据训练得到,基于模型计算初始预估运动状态信息,可使得生成

一种轨迹规划方法、装置、存储介质及电子设备.pdf
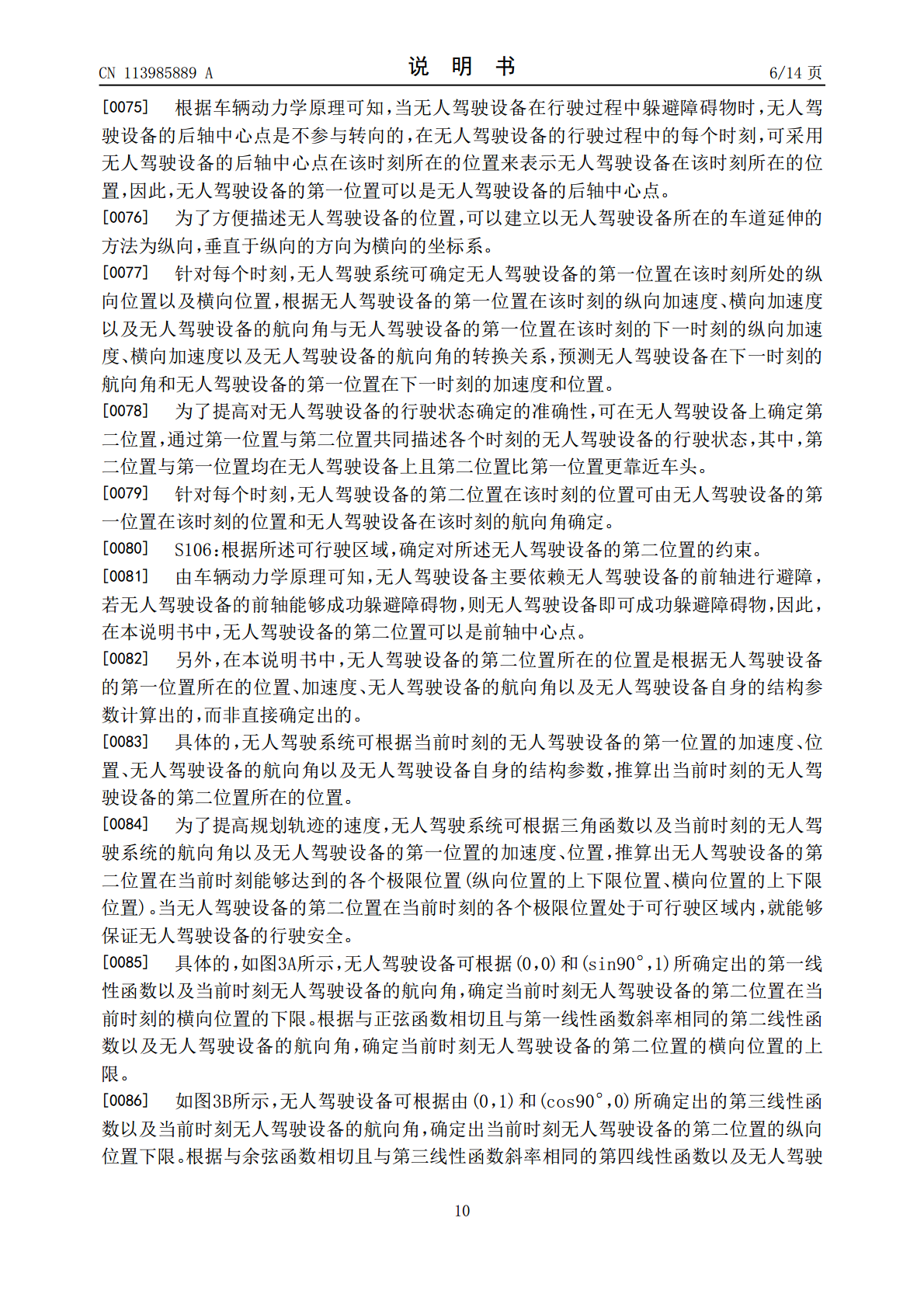
本说明书公开了一种轨迹规划方法、装置、存储介质及电子设备,将由至少两个子区域构成且完全覆盖无人驾驶设备的区域作为无人驾驶设备的范围,结合障碍物范围,确定可行驶区域,从而确定对无人驾驶设备的第二位置的约束。根据当前时刻航向角、第一位置的行驶状态、当前时刻与下一时刻航向角与加速度转换关系,预测下一时刻第二位置的行驶状态。根据上述约束,以下一时刻第一位置行驶状态和目标状态差异最小为目标,确定当前时刻第一位置的加速度和航向角。根据各时刻航向角、第一位置的位置与加速度规划轨迹。本方法在完全覆盖无人驾驶设备的前提下,

一种轨迹规划方法、装置、存储介质及电子设备.pdf
本说明书公开了一种轨迹规划方法、装置、存储介质及电子设备。通过为障碍物所预测出的轨迹,以及为无人设备所规划出的轨迹来确定无人设备与各障碍物发生碰撞的概率,并根据碰撞概率对障碍物进行膨胀,使得与无人设备发生碰撞的概率更大的障碍物膨胀后的体积也更大,保证能够在规划轨迹时能为无人设备预留出足够的避让空间,而与无人设备发生碰撞的概率小的障碍物膨胀后的体积也就较小,从而在规划轨迹时为无人设备提供更大的解集空间。

一种轨迹预测方法、装置、存储介质及电子设备.pdf
本说明书公开了一种轨迹预测方法、装置、存储介质及电子设备。可用于无人驾驶技术领域。根据所要预测的目标障碍物自身的运动信息以及周围的环境信息,通过道路预测模型来选择出目标障碍物所在的预测子道路,并根据所选择出的预测子道路来预测目标障碍物的运动轨迹。采用上述方法预测运动轨迹时,由于先预测目标障碍物的子道路,也即并不预设目标障碍物始终在同一子道路上平行于道路方向运动,因此,所预测出的运动轨迹还能够描述目标障碍物在垂直于道路方向上的运动,提高了对目标障碍物轨迹预测的精确性。

一种轨迹预测方法、装置、电子设备及存储介质.pdf
本申请公开一种轨迹预测方法、装置、电子设备及存储介质,属于健康养老技术领域,该方法包括:获取目标对象在当前周期内的轨迹数据,轨迹数据包括目标对象达到的地点和地点的到达次序,对轨迹数据进行特征分析,得到轨迹特征,基于权重参数对轨迹特征进行转换处理,得到转换特征,基于转换特征,对目标对象前往各候选地点的兴趣进行分析,基于兴趣分析结果,确定目标对象将要前往的地点,权重参数是对目标对象在历史周期内轨迹数据的轨迹特征与转换特征之间的关系进行学习得到的。这样,可以提前获知目标对象将要前往的地点,便于管理者掌握目标对象