
目标跟踪方法及相关系统、存储介质、智能驾驶车辆.pdf

念珊****写意

1/10
2/10
3/10

4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

目标跟踪方法及相关系统、存储介质、智能驾驶车辆.pdf
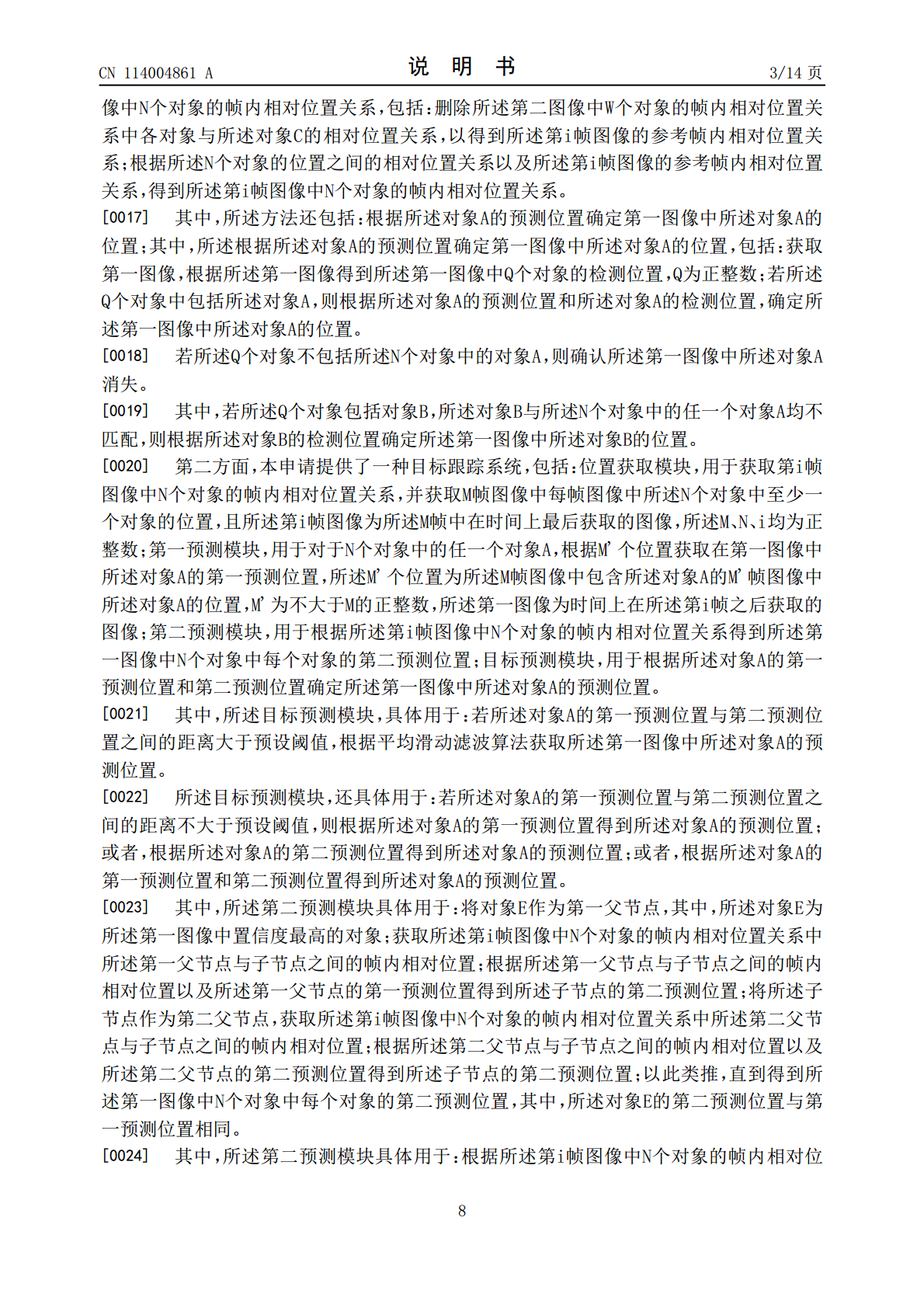
本申请实施例提供一种目标跟踪方法及相关系统、存储介质、智能驾驶车辆,包括:获取第i帧图像中N个对象的帧内相对位置关系,并获取M帧图像中每帧图像中所述N个对象中至少一个对象的目标位置,获取在第一图像中对象A的第一预测位置;根据所述第i帧图像中N个对象的帧内相对位置关系得到所述第一图像中N个对象中每个对象的第二预测位置;根据所述对象A的第一预测位置和第二预测位置确定所述第一图像中所述对象A的预测位置。采用该手段,基于在时间获取上较前的图像中各对象的帧内相对位置关系得到各对象在当前帧图像中的预测位置,可有效抑制
智能驾驶车辆的环境感知系统、方法、车辆及存储介质.pdf
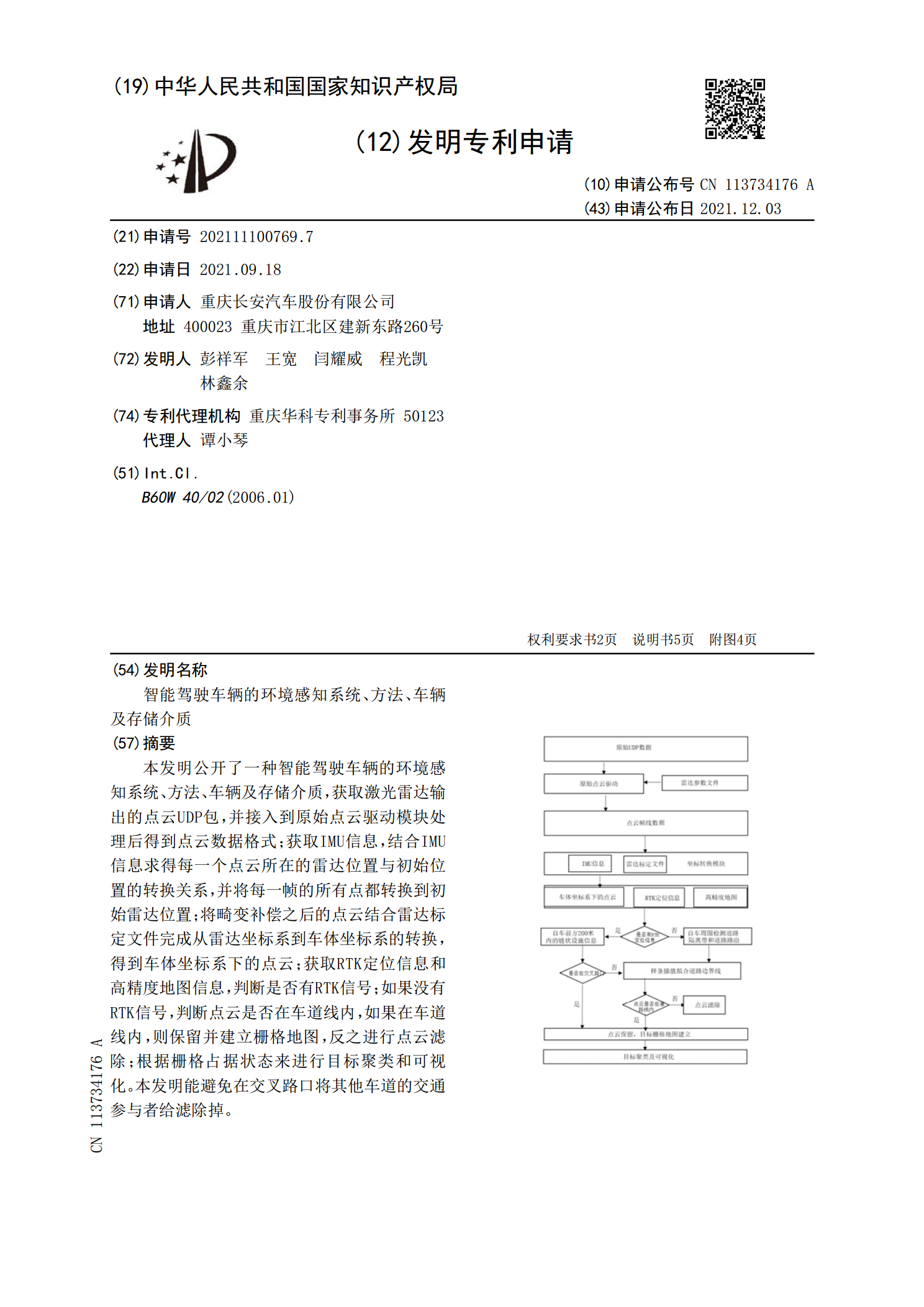
本发明公开了一种智能驾驶车辆的环境感知系统、方法、车辆及存储介质,获取激光雷达输出的点云UDP包,并接入到原始点云驱动模块处理后得到点云数据格式;获取IMU信息,结合IMU信息求得每一个点云所在的雷达位置与初始位置的转换关系,并将每一帧的所有点都转换到初始雷达位置;将畸变补偿之后的点云结合雷达标定文件完成从雷达坐标系到车体坐标系的转换,得到车体坐标系下的点云;获取RTK定位信息和高精度地图信息,判断是否有RTK信号;如果没有RTK信号,判断点云是否在车道线内,如果在车道线内,则保留并建立栅格地图,反之进行

基于无人机的车辆智能驾驶系统、方法及存储介质.pdf
本发明公开了一种基于无人机的车辆智能驾驶系统、方法及存储介质,包括:无人机子系统,用于获取车辆当前路段交通信息;云端子系统,与所述无人机子系统通信连接,用于接收所述交通信息,根据所述交通信息获取自车附近路段交通信息;车载子系统,与所述无人机子系统、所述云端子系统通信连接,用于接收自车当前路段交通信息以及附近路段交通信息,获取自车行驶路径规划信息,控制自车的运行状态。本发明利用无人机子系统来对环境进行感知,减少了智能驾驶车辆的视野盲区,从而提高了智能驾驶的安全性,同时,在所述无人机子系统的基础上再结合所述云
自动驾驶车辆局部避障及路径跟踪方法、系统及存储介质.pdf
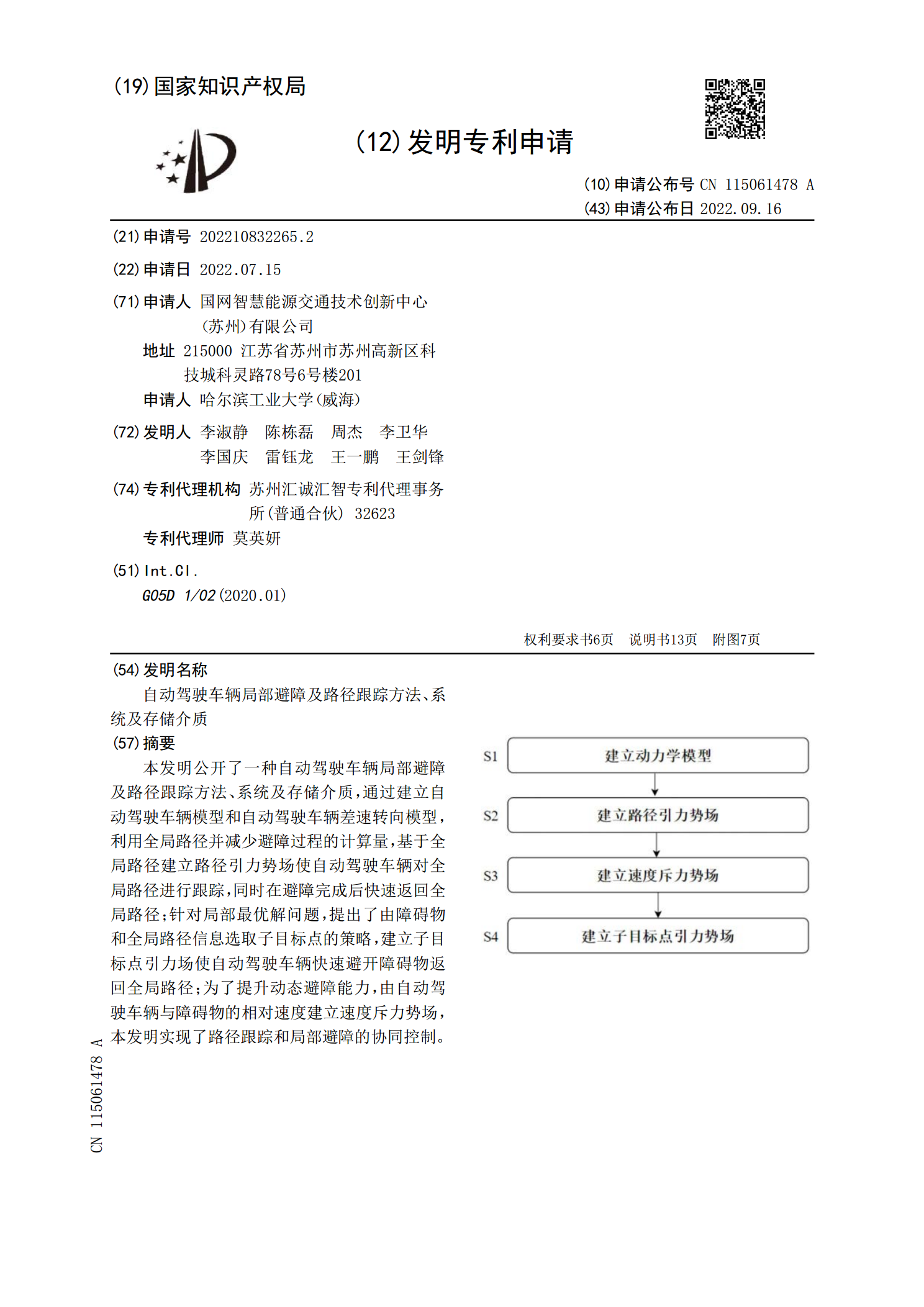
本发明公开了一种自动驾驶车辆局部避障及路径跟踪方法、系统及存储介质,通过建立自动驾驶车辆模型和自动驾驶车辆差速转向模型,利用全局路径并减少避障过程的计算量,基于全局路径建立路径引力势场使自动驾驶车辆对全局路径进行跟踪,同时在避障完成后快速返回全局路径;针对局部最优解问题,提出了由障碍物和全局路径信息选取子目标点的策略,建立子目标点引力场使自动驾驶车辆快速避开障碍物返回全局路径;为了提升动态避障能力,由自动驾驶车辆与障碍物的相对速度建立速度斥力势场,本发明实现了路径跟踪和局部避障的协同控制。
一种车辆智能驾驶纵向控制方法、系统及存储介质.pdf
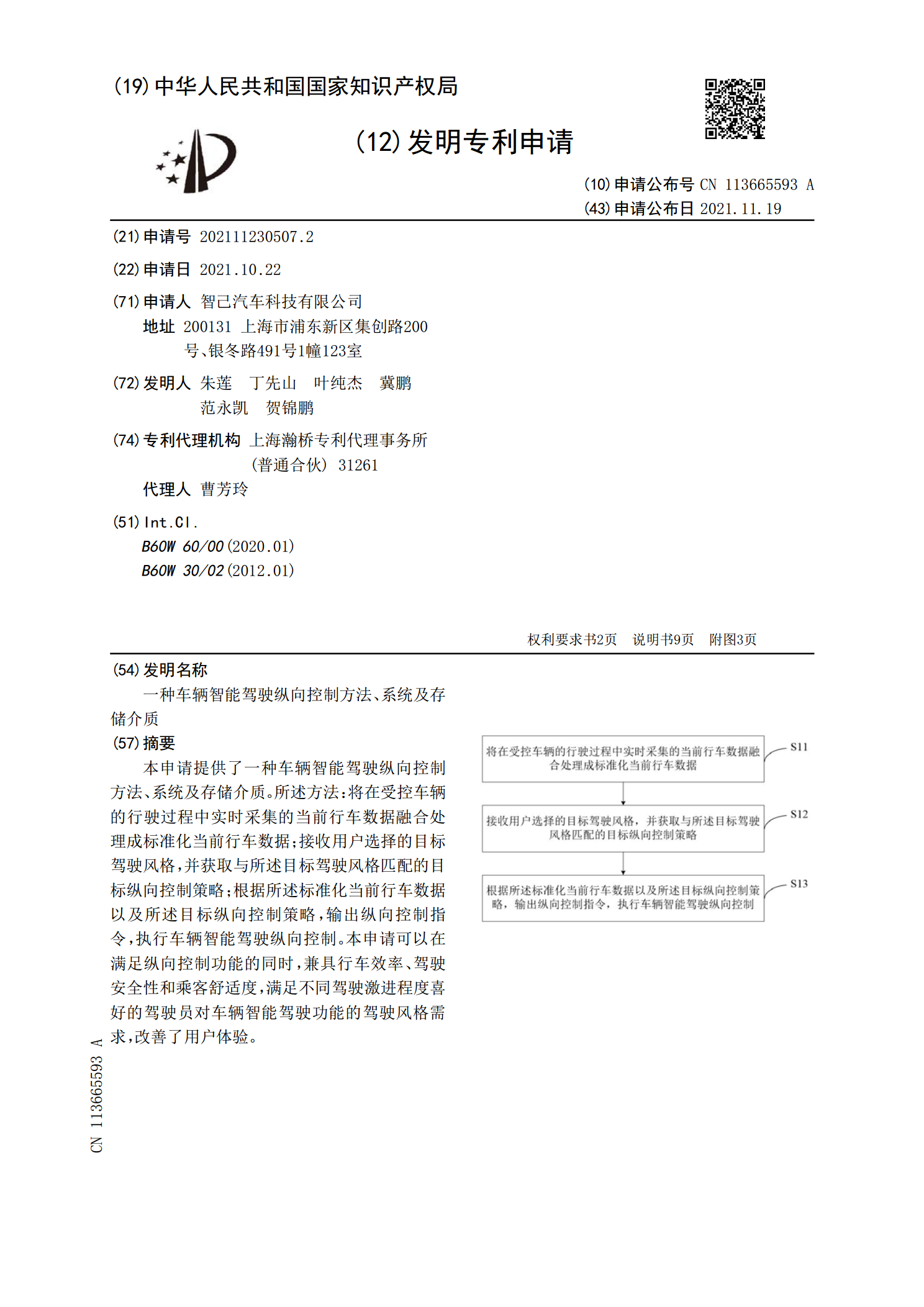
本申请提供了一种车辆智能驾驶纵向控制方法、系统及存储介质。所述方法:将在受控车辆的行驶过程中实时采集的当前行车数据融合处理成标准化当前行车数据;接收用户选择的目标驾驶风格,并获取与所述目标驾驶风格匹配的目标纵向控制策略;根据所述标准化当前行车数据以及所述目标纵向控制策略,输出纵向控制指令,执行车辆智能驾驶纵向控制。本申请可以在满足纵向控制功能的同时,兼具行车效率、驾驶安全性和乘客舒适度,满足不同驾驶激进程度喜好的驾驶员对车辆智能驾驶功能的驾驶风格需求,改善了用户体验。