
一种基于多视图约束的导管中心线匹配方法.pdf

努力****向丝

1/10

2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于多视图约束的导管中心线匹配方法.pdf
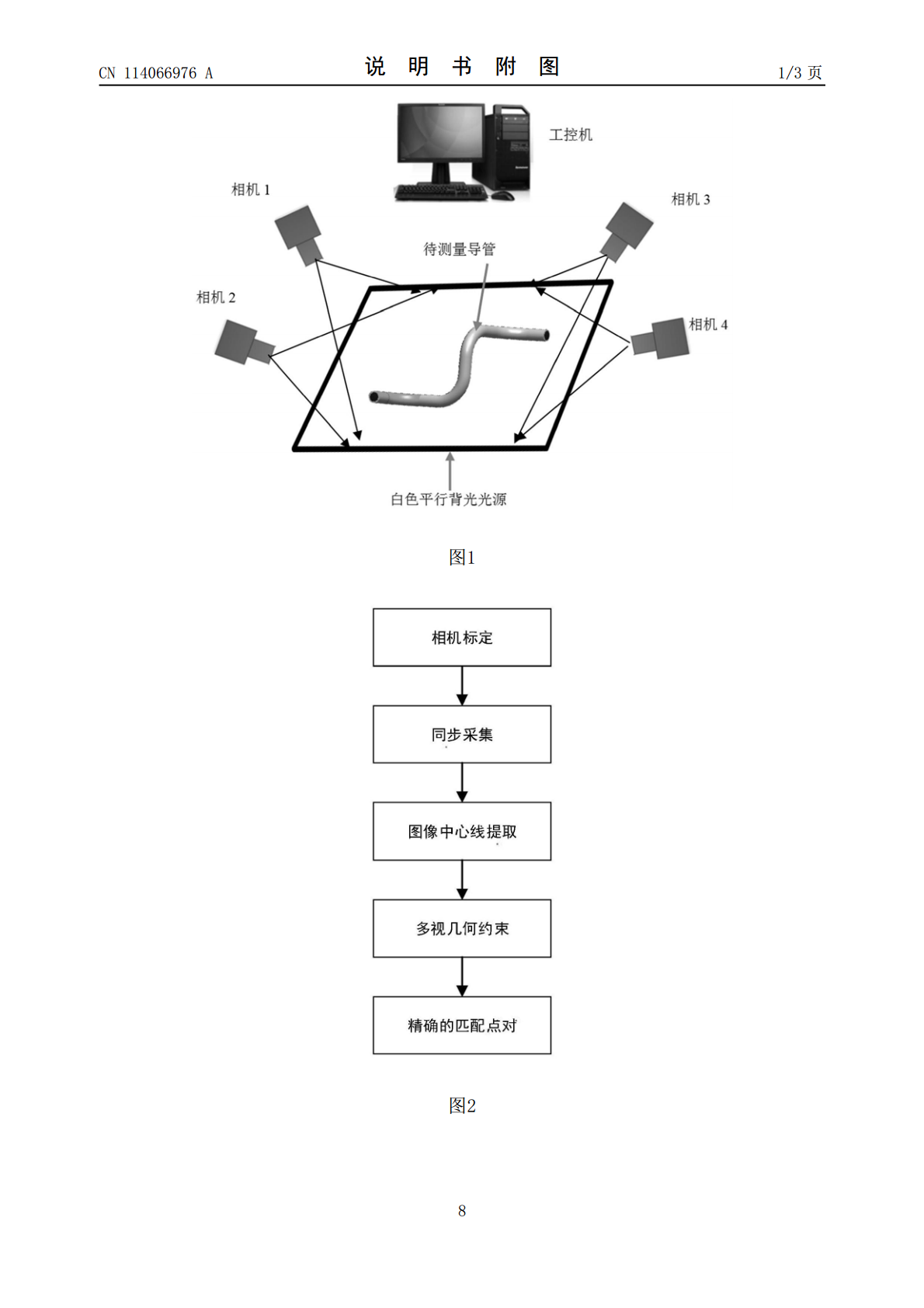
本发明涉及一种基于多视图约束的导管中心线匹配方法。其步骤为:将多目视觉进行两两标定,确定任意两个相机之间的内参数和外参变换矩阵,同步采集图像,对图像进行中心线提取,得到中心线离散坐标点,利用双目三角测量原理得到中心线离散点的三维空间点云,借助于多视图约束,剔除三维重建过程中相邻视图之间的的误匹配点,得到正确的匹配点,拟合中心线曲线,扫掠得到导管三维模型,本发明方法可以实现任意异形导管的中心线三维重建,精度高,效率高,应用范围广泛。

基于跨视图约束的多视图分类方法.docx
基于跨视图约束的多视图分类方法基于跨视图约束的多视图分类方法摘要:多视图学习作为机器学习领域的一个重要研究方向,可以有效地从多个数据源中挖掘不同视图之间的关联信息,提高分类准确性。跨视图约束的多视图分类方法是一种基于数据关联性的多视图学习方法,通过利用视图之间的跨视图约束信息来进行分类。本文将对跨视图约束的多视图分类方法做详细阐述,介绍其基本原理、关键技术和应用场景,并对其进行实验验证和讨论。1.引言多视图分类是指从不同的视图角度对同一对象进行分类。不同于传统的单一视图学习方法,多视图学习能够综合多源数据

一种多约束匹配处理器定位方法.pdf
本发明通过一种多约束匹配处理器定位方法,本发明相比于原多约束匹配处理器的匹配场定位方法,仅需要额外对其计算过程中的自相关矩阵进行处理并计算,除此之外并未增加计算的难度与复杂性,同时使得原计算结果更加准确的与便于搜寻,大大降低了其他干扰峰或者旁瓣的对目标峰的干扰,提高了主峰的辨识度,同时由于引入了加权之后的线性匹配处理器,也使得该方法对环境失配的抗性有一定的提高。
一种多目视觉下的导管中心线点云处理方法.pdf
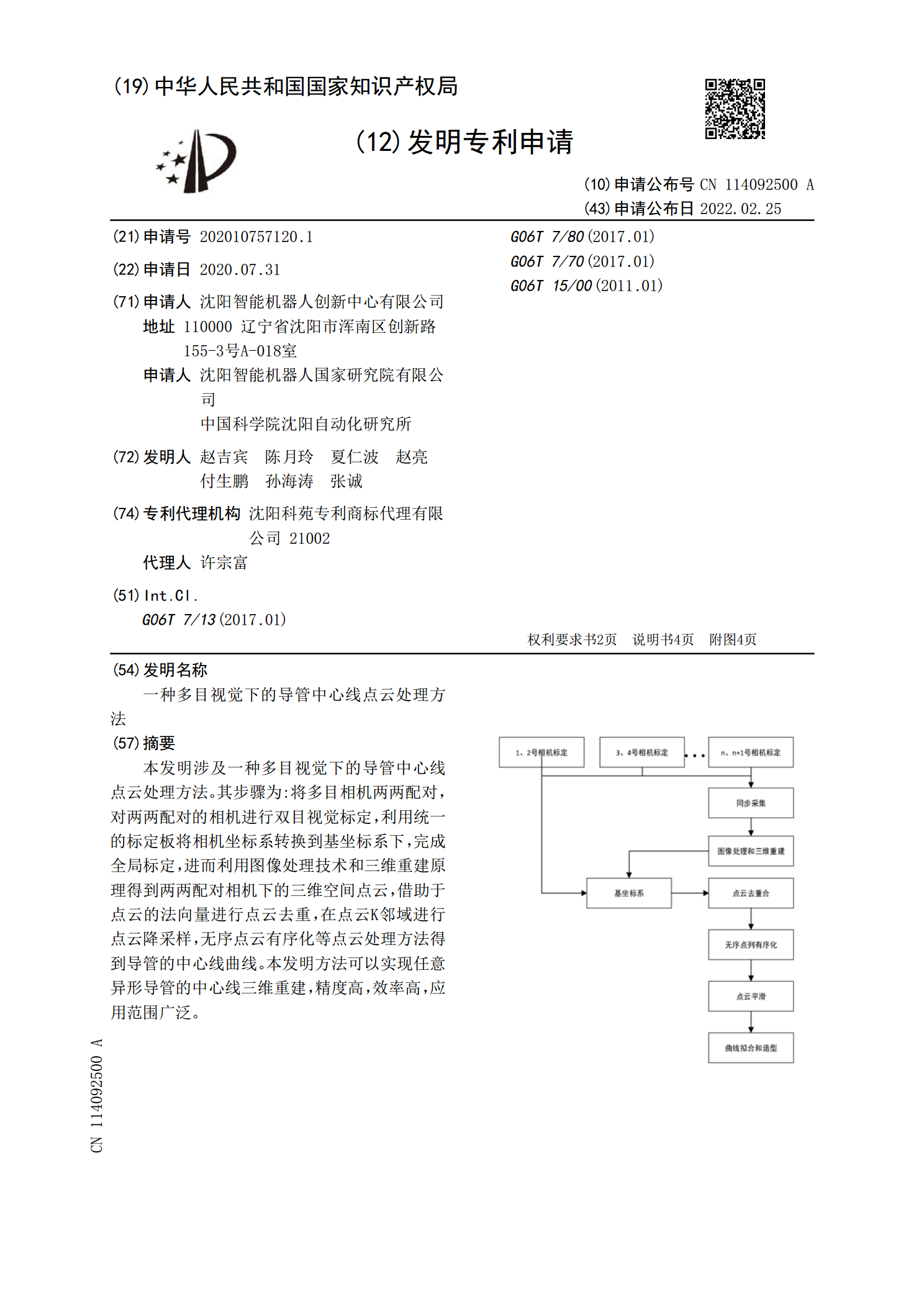
本发明涉及一种多目视觉下的导管中心线点云处理方法。其步骤为:将多目相机两两配对,对两两配对的相机进行双目视觉标定,利用统一的标定板将相机坐标系转换到基坐标系下,完成全局标定,进而利用图像处理技术和三维重建原理得到两两配对相机下的三维空间点云,借助于点云的法向量进行点云去重,在点云K邻域进行点云降采样,无序点云有序化等点云处理方法得到导管的中心线曲线。本发明方法可以实现任意异形导管的中心线三维重建,精度高,效率高,应用范围广泛。

一种基于约束三角网的道路中心线的提取方法.docx
一种基于约束三角网的道路中心线的提取方法摘要:道路中心线是数字地图、道路规划以及交通仿真等领域中的重要数据,其提取一直是地图学、计算机科学和地理信息科学领域的重要研究方向。本论文提出了一种基于约束三角网的道路中心线提取方法,通过对道路网格化和三角网约束分析,结合神经网络算法实现道路中心线的精准提取,该方法具有提取效率高、精度高等优点,可广泛应用于数字地图更新、自动驾驶等领域。关键词:道路中心线,约束三角网,神经网络算法,数字地图一、引言道路中心线是道路的基本组成部分,是数字地图、道路规划以及交通仿真等领域