
移动目标的遮挡预测方法、装置、设备和存储介质.pdf

努力****承悦

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共30页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
移动目标的遮挡预测方法、装置、设备和存储介质.pdf
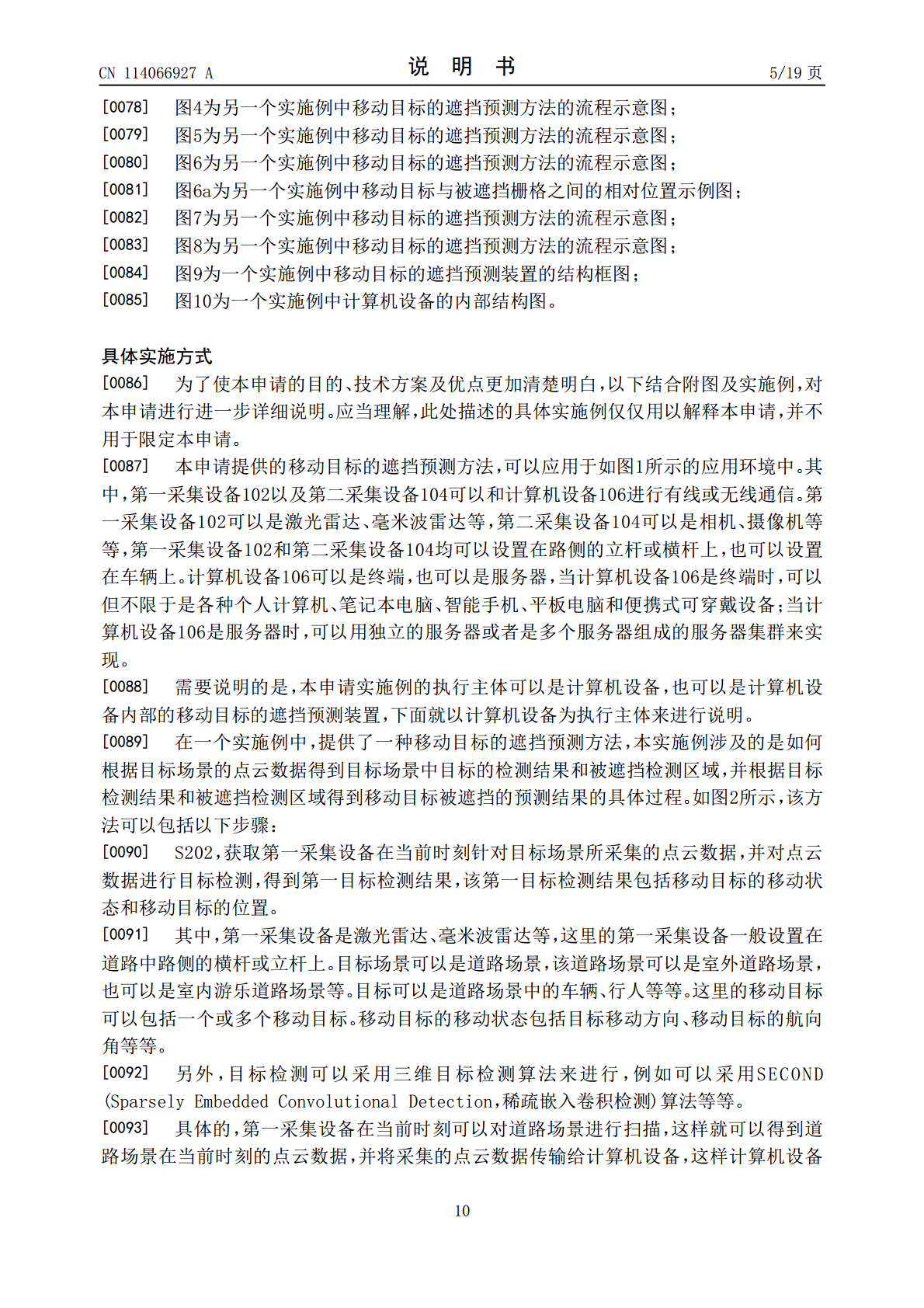
本申请涉及一种移动目标的遮挡预测方法、装置、设备和存储介质。所述方法包括:获取第一采集设备在当前时刻针对目标场景所采集的点云数据,并对所述点云数据进行目标检测,得到第一目标检测结果,所述第一目标检测结果用于表征目标所在的方位;对所述点云数据进行栅格划分,并根据划分结果确定划分的各个栅格是否被遮挡,得到被遮挡栅格;根据所述第一目标检测结果和所述被遮挡栅格之间的方位关联关系,确定所述目标场景中目标被遮挡的概率;其中,所述方位关联关系用于表征所述目标与所述被遮挡栅格之间的相对方位。采用本方法能够精准预测目标是否

异形屏遮挡图标的检测方法、装置、设备及存储介质.pdf
本发明提供一种异形屏遮挡图标的检测方法、装置、设备及存储介质,该方案应用在终端设备中,通过终端设备执行游戏应用并在终端设备的异形屏上渲染得到用户界面,该用户界面中包括游戏画面,该方法包括:获取游戏画面的视频图像,其中,视频图像中包括多个图片图像,图片图像的边缘位置包括至少一个图标;基于遮挡检测模型对视频图像进行检测,确定至少一个图标是否在异形屏上显示时被异形屏的异形区域遮挡,其中,遮挡检测模型是根据预先获取的样本对神经网络模型进行训练得到的、用于检测图像中至少一个图标是否被遮挡的模型,通过这种方式可以避免
遮挡剔除方法、设备、存储介质及装置.pdf
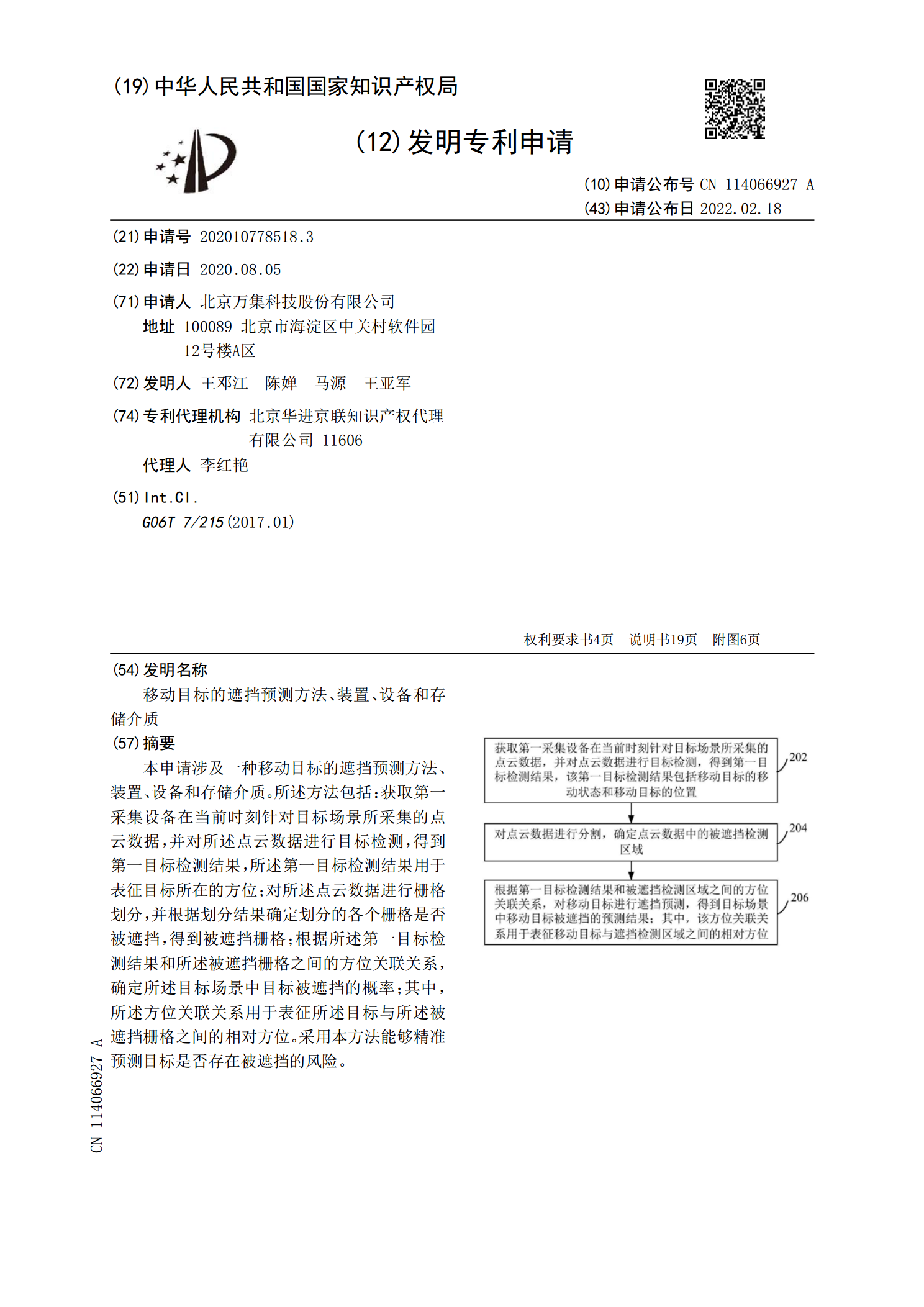
本发明公开了一种遮挡剔除方法、设备、存储介质及装置,该方法包括:将待处理模型中的重复计算单元由中央处理器移入图形处理器,通过离线遮挡剔除算法剔除层次包围体场景树中的目标结点,将层次包围体场景树中的剩余结点传入图形处理器中并行计算待处理模型的潜在可见集,根据潜在可见集对待处理模型进行遮挡剔除;本发明中,首先针对传统遮挡剔除算法中大量的重复数据计算的问题,将大量的重复计算单元由中央处理器移入图形处理器中做并行计算,从而加速了计算潜在可见集的速度;然后针对场景中时间开销过大的问题,引入离线遮挡剔除算法,通过构建
遮挡检测方法及装置、电子设备和存储介质.pdf
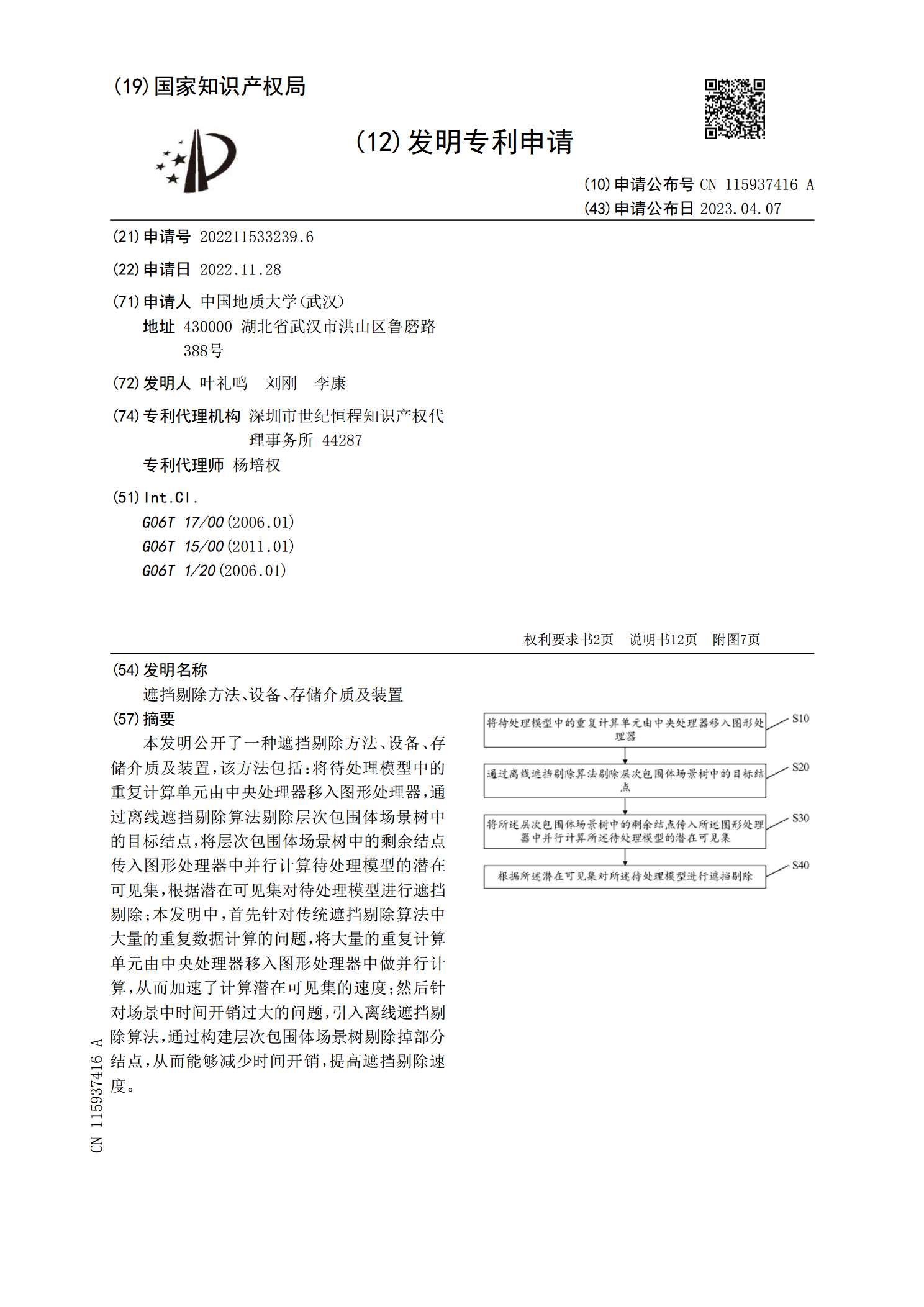
本公开涉及一种遮挡检测方法及装置、电子设备和存储介质,所述方法包括:根据当前视频帧中多个待检测图像块的图像特征统计图,与参考视频帧中多个参考图像块的图像特征统计图,确定所述当前视频帧中是否存在相对于所述参考视频帧出现图像特征统计图变化异常的目标待检测图像块;在确定所述当前视频帧中存在所述目标待检测图像块的情况下,对所述目标待检测图像块进行边缘检测,得到所述目标待检测图像块的边缘检测结果;根据所述边缘检测结果,确定采集所述当前视频帧的图像采集设备是否存在遮挡。本公开实施例可以有效实现对图像采集设备的遮挡检测

弹幕防遮挡方法、装置、设备及存储介质.pdf
本公开关于一种弹幕防遮挡方法、装置、设备及存储介质,涉及视频技术领域。方法包括:对目标视频的视频序列中的多个视频帧分别进行文字识别,得到多个视频帧各自的包括第一区域和第二区域的二值化灰度图,二值化灰度图中每个像素点对应的灰度值用于指示像素点是否属于第一区域,第一区域为视频帧中文字区域的中心区域;对于每个视频帧,若视频帧的二值化灰度图中的第一区域与视频帧的前一视频帧的二值化灰度图中的第一区域之间的重合率大于预设阈值,将前一视频帧中的文字区域作为视频帧中的文字区域;基于视频帧中的文字区域生成视频帧的文字蒙版,